Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino Mega 2560 Controlled Multi-Servo Robotic System with Battery Power
Circuit Documentation
Summary
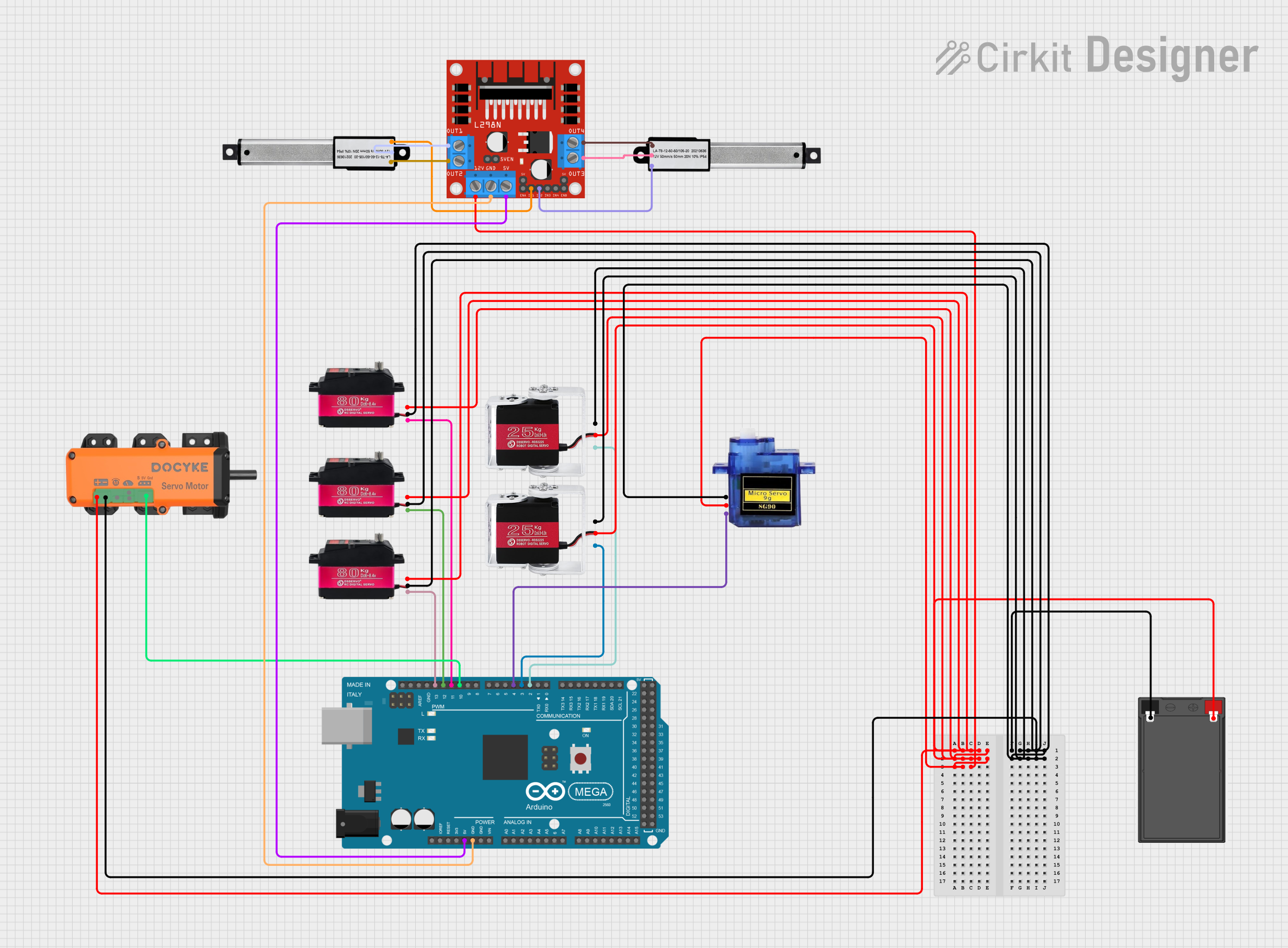
This document provides a detailed overview of a circuit that includes various servos, a motor driver, a battery, and an Arduino Mega 2560 microcontroller. The circuit is designed to control multiple servos and a linear actuator using the Arduino Mega 2560. The document includes a component list, wiring details, and the code used in the microcontroller.
Component List
Micro Servo 9G
- Description: A small servo motor used for precise control of angular position.
- Pins: GND, +5V, PWM
25KG Robot Servo
- Description: A high-torque servo motor used for heavy-duty applications.
- Pins: GND, +5V, PWM
80 kg Servo
- Description: A high-torque servo motor used for very heavy-duty applications.
- Pins: PWR, GND, PWM
Mini Electric Linear Actuator
- Description: A small linear actuator used for linear motion control.
- Pins: PWR, GND, PWM
350kg High Torque RC Servo
- Description: A very high-torque servo motor used for extremely heavy-duty applications.
- Pins: +V, -V, F/R Switch, Center Point, Range Angle, Signal Input
Battery
- Description: Power source for the circuit.
- Pins: -, +
L298N DC Motor Driver
- Description: A motor driver used to control DC motors and linear actuators.
- Pins: OUT1, OUT2, 12V, GND, 5V, OUT3, OUT4, 5V-ENA-JMP-I, 5V-ENA-JMP-O, +5V-J1, +5V-J2, ENA, IN1, IN2, IN3, IN4, ENB
Arduino Mega 2560
- Description: A microcontroller board used to control the servos and linear actuators.
- Pins: IOREF, RESET, 3V3, 5V, GND, VIN, A0-A15, D21/SCL, D20/SDA, D19/RX1, D18/TX1, D17 PWM/RX2, D16 PWM/TX2, D15/RX3, D14/TX3, D0 RX0, D1 TX0, D2 PWM, D3 PWM, D4 PWM, D5 PWM, D6 PWM, D7 PWM, D8 PWM, D9 PWM, D10 PWM, D11 PWM, D12 PWM, D13 PWM, AREF, SDA, SCL, D52, D50, D48, D46, D44, D42, D40, D38, D36, D34, D32, D30, D28, D26, D24, D22, D53, D51, D49, D47, D45, D43, D41, D39, D37, D35, D33, D31, D29, D27, D25, D23, 6swdw
Wiring Details
Micro Servo 9G
- GND: Connected to the battery (-)
- +5V: Connected to the battery (+)
- PWM: Connected to Arduino Mega 2560 (D4 PWM)
25KG Robot Servo
- GND: Connected to the battery (-)
- +5V: Connected to the battery (+)
- PWM:
- One instance connected to Arduino Mega 2560 (D2 PWM)
- Another instance connected to Arduino Mega 2560 (D3 PWM)
80 kg Servo
- PWR: Connected to the battery (+)
- GND: Connected to the battery (-)
- PWM:
- One instance connected to Arduino Mega 2560 (D11 PWM)
- Another instance connected to Arduino Mega 2560 (D12 PWM)
- Another instance connected to Arduino Mega 2560 (D13 PWM)
Mini Electric Linear Actuator
- PWR:
- One instance connected to L298N DC motor driver (OUT2)
- Another instance connected to L298N DC motor driver (OUT4)
- GND:
- One instance connected to L298N DC motor driver (OUT1)
- Another instance connected to L298N DC motor driver (OUT3)
- PWM:
- One instance connected to L298N DC motor driver (IN1)
- Another instance connected to L298N DC motor driver (IN2)
350kg High Torque RC Servo
- +V: Connected to the battery (+)
- -V: Connected to the battery (-)
- Signal Input: Connected to Arduino Mega 2560 (D10 PWM)
Battery
- -: Connected to all GND pins of the servos and the L298N DC motor driver
- +: Connected to all +5V/PWR pins of the servos and the L298N DC motor driver
L298N DC Motor Driver
- 12V: Connected to the battery (+)
- GND: Connected to the battery (-)
- 5V: Connected to Arduino Mega 2560 (5V)
- OUT1: Connected to Mini Electric Linear Actuator (GND)
- OUT2: Connected to Mini Electric Linear Actuator (PWR)
- OUT3: Connected to Mini Electric Linear Actuator (GND)
- OUT4: Connected to Mini Electric Linear Actuator (PWR)
- IN1: Connected to Mini Electric Linear Actuator (PWM)
- IN2: Connected to Mini Electric Linear Actuator (PWM)
Arduino Mega 2560
- 5V: Connected to L298N DC motor driver (5V)
- GND: Connected to L298N DC motor driver (GND)
- D2 PWM: Connected to 25KG Robot Servo (PWM)
- D3 PWM: Connected to 25KG Robot Servo (PWM)
- D4 PWM: Connected to Micro Servo 9G (PWM)
- D10 PWM: Connected to 350kg High Torque RC Servo (Signal Input)
- D11 PWM: Connected to 80 kg Servo (PWM)
- D12 PWM: Connected to 80 kg Servo (PWM)
- D13 PWM: Connected to 80 kg Servo (PWM)
Code
Arduino Mega 2560 Code
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
This concludes the documentation for the circuit. The provided information includes a summary, a detailed component list, wiring details, and the code used in the Arduino Mega 2560 microcontroller.