Arduino-Based RFID Car Parking System with SIM800L and IR Sensors
Circuit Documentation
Summary of the Circuit
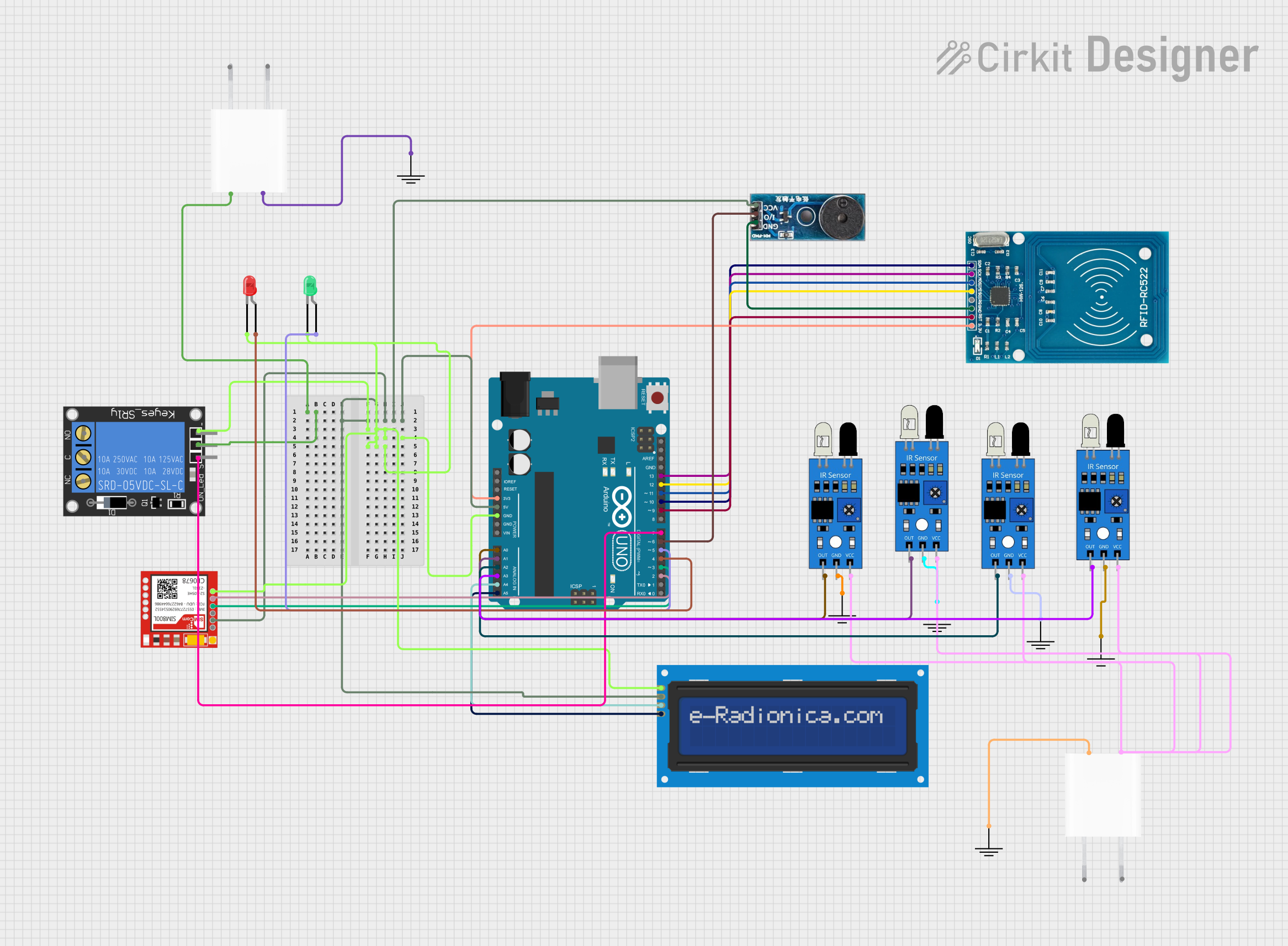
The circuit is designed to control a car parking system. It features an RFID scanner for identification, infrared sensors for parking space detection, LEDs for status indication, a buzzer for auditory feedback, an LCD display for visual feedback, and a relay for controlling an external device. The system operates by detecting available parking spaces and displaying the status on the LCD. The Arduino UNO serves as the central microcontroller unit to manage inputs and outputs, interfacing with the RFID module, sensors, LEDs, buzzer, and LCD.
Component List
RFID-RC522
- Description: RFID reader/writer module for contactless communication at 13.56MHz.
- Pins: VCC (3.3V), RST, GND, IRQ, MISO, MOSI, SCK, SDA
LCD screen 16x2 I2C
- Description: Alphanumeric liquid crystal display with 16 characters by 2 lines and I2C interface.
- Pins: SCL, SDA, VCC, GND
Buzzer Module
- Description: An electronic buzzer for producing sound signals.
- Pins: GND, Vcc, I/O
1-Channel Relay (5V 10A)
- Description: A relay module capable of switching up to 10A loads at 5V.
- Pins: NC, signal, C, power, NO, ground
Sim800l
- Description: GSM/GPRS module for cellular communication.
- Pins: NET, RST, VCC, RXD, TXD, GND
Arduino UNO
- Description: Microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0-A5, SCL, SDA, AREF, D0-D13
LED: Two Pin (red)
- Description: Red LED for indicating status.
- Pins: cathode, anode
LED: Two Pin (green)
- Description: Green LED for indicating status.
- Pins: cathode, anode
IR Sensor
- Description: Infrared sensor for detecting object presence.
- Pins: out, gnd, vcc
5V Adapter
- Description: Power adapter to convert AC to 5V DC.
- Pins: AC In 1, AC In 2, 5V, GND
GND
- Description: Ground reference point for the circuit.
- Pins: GND
Wiring Details
RFID-RC522
- VCC (3.3V) connected to Arduino UNO 3.3V
- RST connected to Arduino UNO D9
- GND connected to common ground
- MISO connected to Arduino UNO D12
- MOSI connected to Arduino UNO D11
- SCK connected to Arduino UNO D13
- SDA connected to Arduino UNO D10
LCD screen 16x2 I2C
- SCL connected to Arduino UNO A5
- SDA connected to Arduino UNO A4
- VCC connected to common 5V supply
- GND connected to common ground
Buzzer Module
- GND connected to common ground
- Vcc connected to common 5V supply
- I/O connected to Arduino UNO D6
1-Channel Relay (5V 10A)
- power connected to 5V supply from 5V Adapter
- ground connected to common ground
- signal connected to Arduino UNO D7
Sim800l
- VCC connected to common 5V supply
- GND connected to common ground
- RXD connected to Arduino UNO D3
- TXD connected to Arduino UNO D2
Arduino UNO
- 5V and GND pins connected to common 5V supply and ground respectively
- Digital and analog pins connected as per the wiring details above
LED: Two Pin (red)
- cathode connected to common ground
- anode connected to Arduino UNO D4
LED: Two Pin (green)
- cathode connected to common ground
- anode connected to Arduino UNO D5
IR Sensors
- out pins connected to Arduino UNO A0, A1, A2, A3 respectively
- vcc pins connected to common 5V supply
- gnd pins connected to common ground
5V Adapter
- 5V output connected to common 5V supply
- GND output connected to common ground
Documented Code
/*
* Car Parking System
* This Arduino sketch controls a car parking system using an RFID scanner,
* infrared sensors, LEDs, a buzzer, and an LCD display. The system detects
* available parking spaces and displays the status on the LCD. The buzzer
* and LEDs provide visual and auditory feedback.
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <SPI.h>
#include <MFRC522.h>
// Pin definitions
#define RFID_RST_PIN 9
#define RFID_SS_PIN 10
#define BUZZER_PIN 6
#define RED_LED_PIN 4
#define GREEN_LED_PIN 5
#define RELAY_PIN 7
#define IR_SENSOR_1_PIN A0
#define IR_SENSOR_2_PIN A1
#define IR_SENSOR_3_PIN A2
#define IR_SENSOR_4_PIN A3
#define SIM800L_RX_PIN 3
#define SIM800L_TX_PIN 2
// Create instances
LiquidCrystal_I2C lcd(0x27, 16, 2);
MFRC522 rfid(RFID_SS_PIN, RFID_RST_PIN);
void setup() {
// Initialize serial communication
Serial.begin(9600);
// Initialize LCD
lcd.begin();
lcd.backlight();
// Initialize RFID
SPI.begin();
rfid.PCD_Init();
// Initialize pins
pinMode(BUZZER_PIN, OUTPUT);
pinMode(RED_LED_PIN, OUTPUT);
pinMode(GREEN_LED_PIN, OUTPUT);
pinMode(RELAY_PIN, OUTPUT);
pinMode(IR_SENSOR_1_PIN, INPUT);
pinMode(IR_SENSOR_2_PIN, INPUT);
pinMode(IR_SENSOR_3_PIN, INPUT);
pinMode(IR_SENSOR_4_PIN, INPUT);
pinMode(SIM800L_RX_PIN, INPUT);
pinMode(SIM800L_TX_PIN, OUTPUT);
// Initial states
digitalWrite(BUZZER_PIN, LOW);
digitalWrite(RED_LED_PIN, LOW);
digitalWrite(GREEN_LED_PIN, LOW);
digitalWrite(RELAY_PIN, LOW);
lcd.setCursor(0, 0);
lcd.print("Car Parking System");
delay(2000);
lcd.clear();
}
void loop() {
// Read IR sensors
bool space1 = digitalRead(IR_SENSOR_1_PIN);
bool space2 = digitalRead(IR_SENSOR_2_PIN);
bool space3 = digitalRead(IR_SENSOR_3_PIN);
bool space4 = digitalRead(IR_SENSOR_4_PIN);
// Check parking spaces
int availableSpaces = space1 + space2 + space3 + space4;
// Update LCD
lcd.setCursor(0, 0);
lcd.print("Spaces: ");
lcd.print(availableSpaces);
// Update LEDs and buzzer
if (availableSpaces > 0) {
digitalWrite(GREEN_LED_PIN, HIGH);
digitalWrite(RED_LED_PIN, LOW);
digitalWrite(BUZZER_PIN, LOW);
} else {
digitalWrite(GREEN_LED_PIN, LOW);
digitalWrite(RED_LED_PIN, HIGH);
digitalWrite(BUZZER_PIN, HIGH);
}
delay(1000);
}
This code is responsible for the operation of the car parking system. It initializes the components, reads the status of the IR sensors to determine the number of available parking spaces, and updates the LCD, LEDs, and buzzer accordingly.