Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino-Powered Autonomous Obstacle Avoidance Robot with Servo Control
Circuit Documentation
Summary
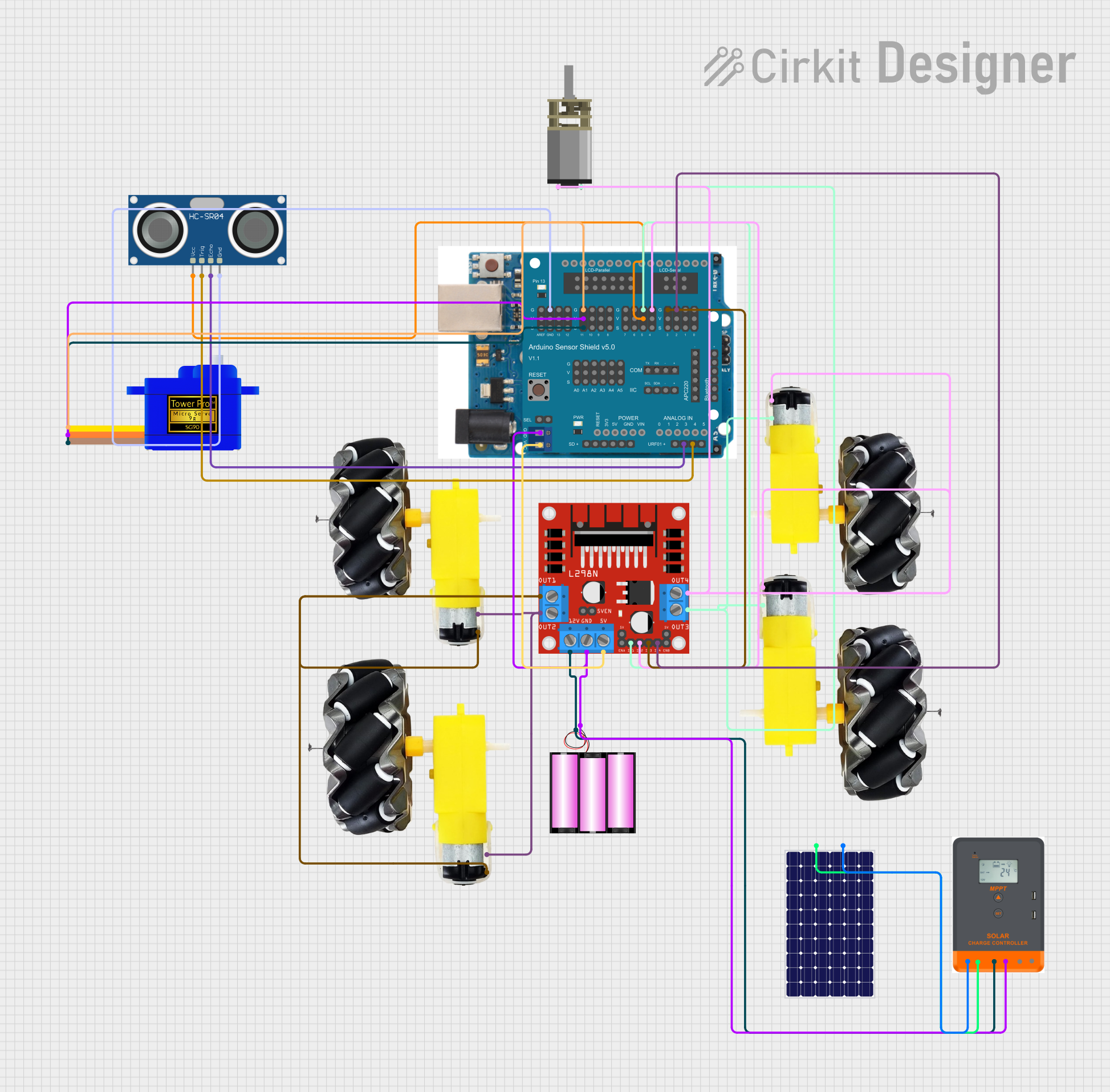
This circuit is designed to control a robotic system using various components including motors, sensors, and a microcontroller. The system utilizes an Arduino UNO as the main controller, which interfaces with a DC motor driver (L298N) to control the movement of motors and wheels. An ultrasonic sensor (HC-SR04) is used for distance measurement, allowing the robot to navigate its environment. The circuit is powered by a 12V battery and can also be charged using a solar panel through a solar charge controller.
Component List
1. Servomotor SG90
- Description: A small servo motor used for precise control of angular position.
- Pins: SIG, VCC, GND
2. Motor and Wheels
- Description: A set of motors and wheels used for driving the robot.
- Pins: vcc, GND
3. L298N DC Motor Driver
- Description: A dual H-Bridge motor driver that allows control of the direction and speed of DC motors.
- Pins: OUT1, OUT2, 12V, GND, 5V, OUT3, OUT4, ENA, IN1, IN2, IN3, IN4
4. Battery 12V
- Description: A rechargeable battery providing power to the circuit.
- Pins: +, -
5. Solar Panel
- Description: A solar panel used to charge the battery.
- Pins: +, -
6. Solar Charge Controller
- Description: A device that manages the charging of the battery from the solar panel.
- Pins: Solar +, Solar -, Battery +, Battery -
7. Arduino UNO
- Description: A microcontroller board based on the ATmega328P, used for programming and controlling the circuit.
- Pins: Various digital and analog pins including SDA, SCL, and power pins.
8. Arduino Sensor Shield v5.0
- Description: An expansion board for the Arduino that provides additional connections for sensors and modules.
- Pins: VCC, GND, various digital pins for sensor connections.
9. HC-SR04 Ultrasonic Sensor
- Description: An ultrasonic distance sensor used for measuring distance to obstacles.
- Pins: VCC, TRIG, ECHO, GND
10. DC Mini Metal Gear Motor
- Description: A small DC motor with metal gears for increased torque.
- Pins: IN1, IN2
Wiring Details
Servomotor SG90
- SIG connected to Arduino Sensor Shield v5.0 pin 11-G
- VCC connected to Arduino Sensor Shield v5.0 pin 11-V
- GND connected to Arduino Sensor Shield v5.0 pin 11-S
Motor and Wheels (Instance 1)
- vcc connected to L298N DC Motor Driver OUT1
- GND connected to L298N DC Motor Driver OUT2
Motor and Wheels (Instance 2)
- vcc connected to L298N DC Motor Driver OUT3
- GND connected to L298N DC Motor Driver OUT4
L298N DC Motor Driver
- 12V connected to Battery +
- GND connected to Battery -
- OUT1 connected to Motor and Wheels (Instance 1) vcc
- OUT2 connected to Motor and Wheels (Instance 1) GND
- OUT3 connected to Motor and Wheels (Instance 2) vcc
- OUT4 connected to Motor and Wheels (Instance 2) GND
- ENA connected to Arduino Sensor Shield v5.0 pin 5-G
- IN1 connected to Arduino Sensor Shield v5.0 pin 4-G
- IN2 connected to Arduino Sensor Shield v5.0 pin 3-G
- IN3 connected to Arduino Sensor Shield v5.0 pin 2-G
- IN4 connected to Arduino Sensor Shield v5.0 pin 1-G
Battery 12V
- + connected to L298N DC Motor Driver 12V
- - connected to L298N DC Motor Driver GND
Solar Panel
- + connected to Solar Charge Controller Solar +
- - connected to Solar Charge Controller Solar -
HC-SR04 Ultrasonic Sensor
- VCC connected to Arduino Sensor Shield v5.0 pin 5-V
- TRIG connected to Arduino Sensor Shield v5.0 pin URF01-A0
- ECHO connected to Arduino Sensor Shield v5.0 pin URF01-A1
- GND connected to Arduino Sensor Shield v5.0 pin GND-G
Documented Code
#include <AFMotor.h>
#include <NewPing.h>
#include <Servo.h>
#define TRIG_PIN A0
#define ECHO_PIN A1
#define MAX_DISTANCE 200
#define MAX_SPEED 190
#define MAX_SPEED_OFFSET 20
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
AF_DCMotor motor1(1, MOTOR12_1KHZ);
AF_DCMotor motor2(2, MOTOR12_1KHZ);
AF_DCMotor motor3(3, MOTOR34_1KHZ);
AF_DCMotor motor4(4, MOTOR34_1KHZ);
Servo myservo;
boolean goesForward=false;
int distance = 100;
int speedSet = 0;
void setup() {
myservo.attach(10);
myservo.write(115);
delay(2000);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
}
void loop() {
int distanceR = 0;
int distanceL = 0;
delay(40);
if(distance<=15)
{
moveStop();
delay(100);
moveBackward();
delay(300);
moveStop();
delay(200);
distanceR = lookRight();
delay(200);
distanceL = lookLeft();
delay(200);
if(distanceR>=distanceL)
{
turnRight();
moveStop();
}else
{
turnLeft();
moveStop();
}
}else
{
moveForward();
}
distance = readPing();
}
int lookRight()
{
myservo.write(50);
delay(500);
int distance = readPing();
delay(100);
myservo.write(115);
return distance;
}
int lookLeft()
{
myservo.write(170);
delay(500);
int distance = readPing();
delay(100);
myservo.write(115);
return distance;
delay(100);
}
int readPing() {
delay(70);
int cm = sonar.ping_cm();
if(cm==0)
{
cm = 250;
}
return cm;
}
void moveStop() {
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
void moveForward() {
if(!goesForward)
{
goesForward=true;
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2)
{
motor1.setSpeed(speedSet);
motor2.setSpeed(speedSet);
motor3.setSpeed(speedSet);
motor4.setSpeed(speedSet);
delay(5);
}
}
}
void moveBackward() {
goesForward=false;
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2)
{
motor1.setSpeed(speedSet);
motor2.setSpeed(speedSet);
motor3.setSpeed(speedSet);
motor4.setSpeed(speedSet);
delay(5);
}
}
void turnRight() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
delay(500);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void turnLeft() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
delay(500);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);