Arduino UNO-Based Smart Distance Sensing and Display System with RGB LED and Servo Control
Circuit Documentation
Summary
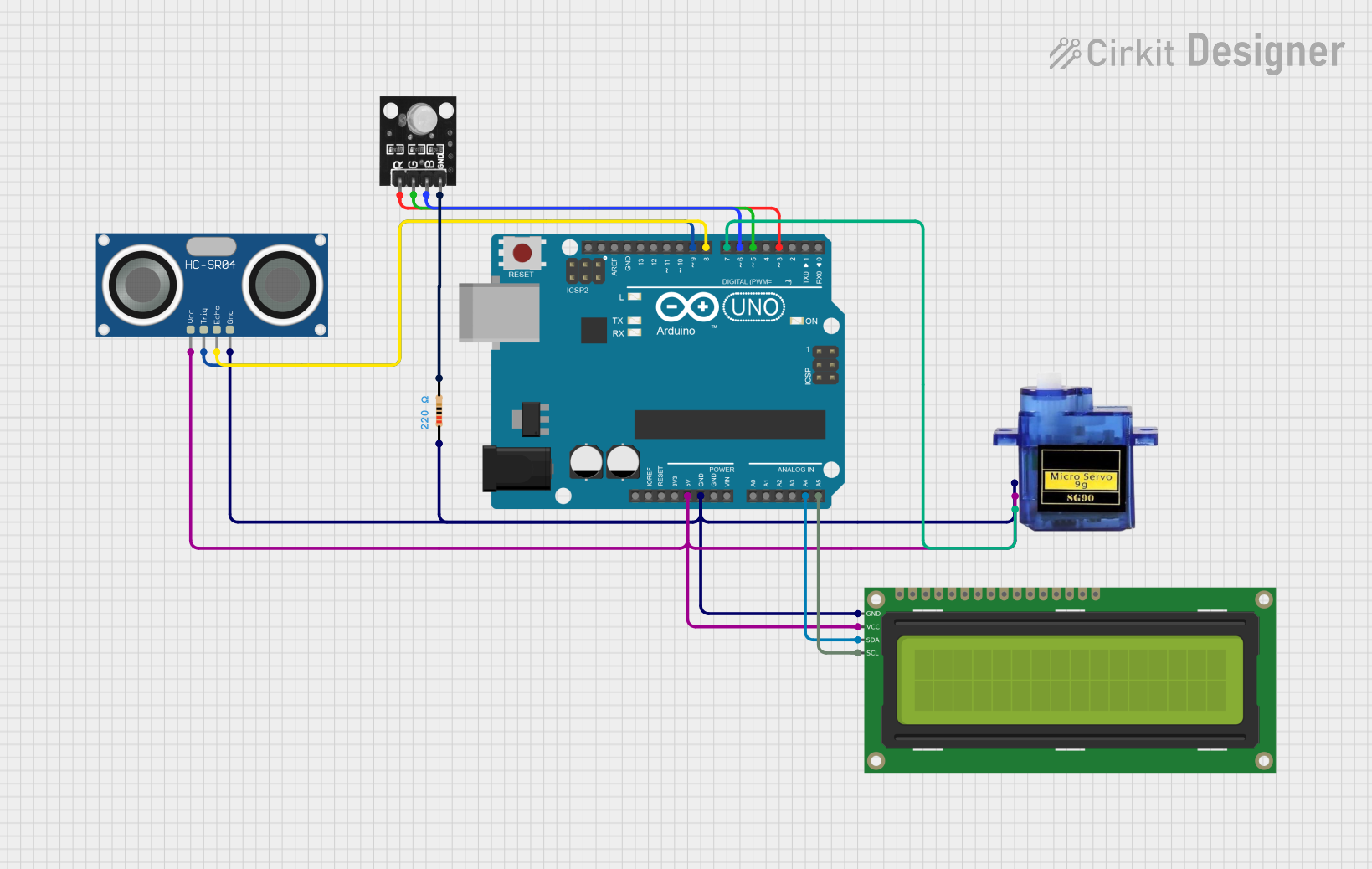
This circuit involves an Arduino UNO microcontroller interfacing with several components: an HC-SR04 Ultrasonic Sensor, a Micro Servo 9G, a 16x2 I2C LCD, and an RGB LED module. The circuit is designed to measure distance using the ultrasonic sensor, display messages on the LCD, control a servo motor based on the measured distance, and change the color of the RGB LED module accordingly.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
HC-SR04 Ultrasonic Sensor
- Description: A sensor used to measure distance by using ultrasonic waves.
- Pins: VCC, TRIG, ECHO, GND
Micro Servo 9G
- Description: A small servo motor used for precise control of angular position.
- Pins: GND, +5V, PWM
16x2 I2C LCD
- Description: A 16x2 character LCD display with I2C interface.
- Pins: GND, VCC, SDA, SCL
RGB LED Module
- Description: An LED module with red, green, and blue LEDs.
- Pins: +VCC Red, +VCC Green, +VCC Blue, GND
Resistor
- Description: A 220 Ohm resistor used to limit current.
- Pins: pin1, pin2
- Properties: Resistance: 220 Ohms
Wiring Details
Arduino UNO
5V connected to:
- Micro Servo 9G (+5V)
- 16x2 I2C LCD (VCC)
- HC-SR04 Ultrasonic Sensor (VCC)
GND connected to:
- Resistor (pin1)
- Micro Servo 9G (GND)
- 16x2 I2C LCD (GND)
- HC-SR04 Ultrasonic Sensor (GND)
A4 connected to:
- 16x2 I2C LCD (SDA)
A5 connected to:
- 16x2 I2C LCD (SCL)
D9 connected to:
- HC-SR04 Ultrasonic Sensor (TRIG)
D8 connected to:
- HC-SR04 Ultrasonic Sensor (ECHO)
D7 connected to:
- Micro Servo 9G (PWM)
D6 connected to:
- RGB LED Module (+VCC Blue)
D5 connected to:
- RGB LED Module (+VCC Green)
D3 connected to:
- RGB LED Module (+VCC Red)
HC-SR04 Ultrasonic Sensor
VCC connected to:
- Arduino UNO (5V)
GND connected to:
- Arduino UNO (GND)
TRIG connected to:
- Arduino UNO (D9)
ECHO connected to:
- Arduino UNO (D8)
Micro Servo 9G
+5V connected to:
- Arduino UNO (5V)
GND connected to:
- Arduino UNO (GND)
PWM connected to:
- Arduino UNO (D7)
16x2 I2C LCD
VCC connected to:
- Arduino UNO (5V)
GND connected to:
- Arduino UNO (GND)
SDA connected to:
- Arduino UNO (A4)
SCL connected to:
- Arduino UNO (A5)
RGB LED Module
+VCC Red connected to:
- Arduino UNO (D3)
+VCC Green connected to:
- Arduino UNO (D5)
+VCC Blue connected to:
- Arduino UNO (D6)
GND connected to:
- Resistor (pin2)
Resistor
pin1 connected to:
- Arduino UNO (GND)
pin2 connected to:
- RGB LED Module (GND)
Code Documentation
#include <Servo.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,20,4);
const int trigPin = 9;
const int echoPin = 8;
Servo myServo;
const int servoPin = 7;
const int distanceThreshold = 20;
bool isDriving = false;
const int redPin = 3;
const int greenPin = 5;
const int bluePin = 6;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
myServo.attach(servoPin);
myServo.write(0);
lcd.init();
lcd.backlight();
lcd.setCursor(4,0);
lcd.print("Welcome!");
Serial.begin(9600);
}
void loop() {
long duration = measureDistance();
int distance = duration * 0.034 / 2;
Serial.print("Расстояние: ");
Serial.print(distance);
Serial.println(" см");
if (distance > 0 && distance <= distanceThreshold) {
myServo.write(90);
isDriving = true;
} else {
myServo.write(0);
isDriving = false;
}
delay(500);
lcd.setCursor(0, 1);
lcd.print(" ");
lcd.setCursor(0, 1);
if (isDriving) {
lcd.print("Drive");
setColor(255, 0, 255);
delay(3000);
} else {
lcd.print("Wait");
setColor(0, 255, 255);
delay(3000);
}
delay(500);
}
long measureDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
return pulseIn(echoPin, HIGH);
}
void setColor(int red, int green, int blue) {
analogWrite(redPin, red);
analogWrite(greenPin, green);
analogWrite(bluePin, blue);
}
This code initializes the components, measures distance using the HC-SR04 sensor, controls the servo motor based on the measured distance, displays messages on the LCD, and changes the color of the RGB LED module.