ESP32 and MPU-6050 Based Motion Tracking System
Circuit Documentation
Summary of the Circuit
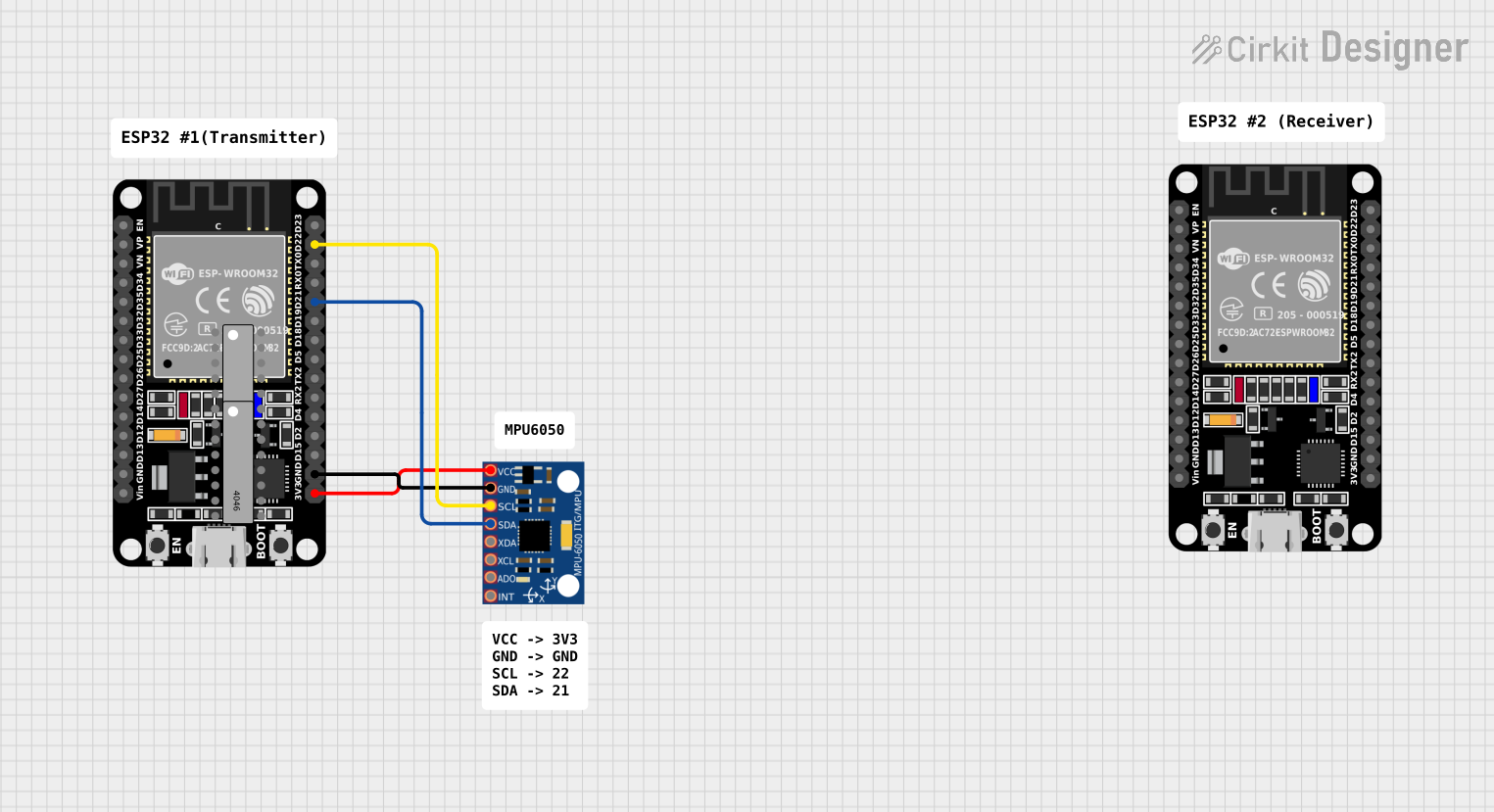
This circuit integrates an ESP32 microcontroller with an MPU-6050 motion sensor. The ESP32 is a versatile microcontroller with Wi-Fi and Bluetooth capabilities, and the MPU-6050 is a 6-axis motion tracking device that combines a 3-axis gyroscope and a 3-axis accelerometer. The ESP32 is responsible for processing data from the MPU-6050 and potentially communicating this information for further use.
Component List
ESP32 (30 pin)
- Description: A 30-pin microcontroller with Wi-Fi and Bluetooth capabilities.
- Purpose: Acts as the central processing unit of the circuit, interfacing with the MPU-6050 sensor and handling data communication.
MPU-6050
- Description: A motion tracking device with a 3-axis gyroscope and a 3-axis accelerometer.
- Purpose: Provides motion tracking data to the ESP32 for processing.
4017
- Description: A decade counter/divider with 10 decoded outputs.
- Purpose: Not directly connected in the current circuit configuration.
4046
- Description: A phase-locked loop (PLL) IC that is used for frequency synthesis and clock generation.
- Purpose: Not directly connected in the current circuit configuration.
Wiring Details
ESP32 (30 pin)
- EN: Not connected
- VP: Not connected
- VN: Not connected
- D34 - D15: Not connected
- GND: Connected to MPU-6050 GND
- Vin: Not connected
- 3V3: Connected to MPU-6050 VCC
- D22: Connected to MPU-6050 SCL
- D21: Connected to MPU-6050 SDA
MPU-6050
- VCC: Connected to ESP32 3V3
- GND: Connected to ESP32 GND
- SCL: Connected to ESP32 D22
- SDA: Connected to ESP32 D21
- XDA, XCL, AD0, INT: Not connected
Documented Code
There is no embedded code provided for the microcontrollers in the circuit. The documentation for the code would typically include information such as the purpose of the code, the main functions, and any libraries used. Since no code is provided, this section is left blank. When code is available, it should be documented here with appropriate comments and explanations for each function and routine.