Wi-Fi Controlled Robotic Vehicle with Distance Sensing and Actuation Capabilities
Circuit Documentation
Summary
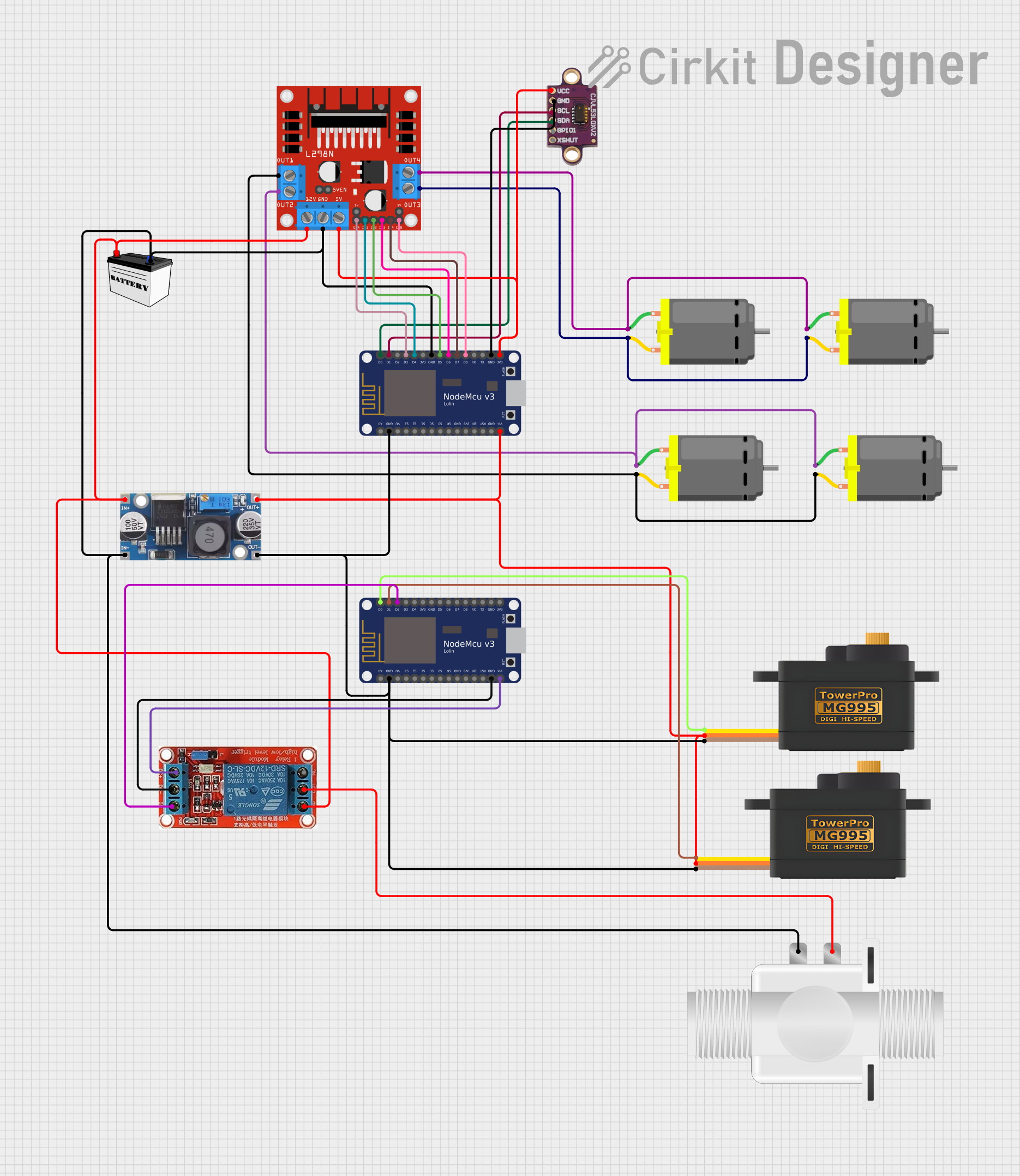
This circuit is designed to control multiple DC motors, servomotors, a solenoid valve, and a distance sensor using two NodeMCU V3 ESP8266 microcontrollers. The circuit includes a motor driver (L298N) to manage the DC motors, a step-down buck converter to regulate voltage, a 12V battery for power supply, and a relay to control the solenoid valve. The distance sensor (vl53l0xv2) interfaces with one of the NodeMCUs for proximity sensing. The servomotors are directly controlled by the NodeMCUs.
Component List
DC Motors: These components are responsible for providing rotational motion. They are driven by the L298N motor driver.
NodeMCU V3 ESP8266: These are microcontroller boards with Wi-Fi capabilities. They are used to control the motors, servomotors, relay, and read data from the distance sensor.
L298N DC Motor Driver: This component is used to control the speed and direction of the DC motors.
vl53l0xv2: A time-of-flight distance sensor that provides accurate distance measurements.
12V Battery (Small Size): Provides the power supply for the circuit.
Step down Buck Converter: Converts the 12V from the battery to a lower voltage suitable for the NodeMCUs and other components.
Servomotor MG995: These are high-torque servomotors used for precise angular positioning.
Plastic Solenoid Valve: An electrically-controlled valve used for controlling the flow of a fluid.
12v Relay: An electrically operated switch that allows the NodeMCU to control high-power devices such as the solenoid valve.
Wiring Details
DC Motors
- Connected to the L298N motor driver's output pins.
NodeMCU V3 ESP8266
- GND: Connected to the ground of the circuit.
- Vin: Connected to the positive output of the step-down buck converter.
- D0 - D8: Various GPIO pins used to control the L298N motor driver, vl53l0xv2 distance sensor, servomotors, and relay.
L298N DC Motor Driver
- OUT1 - OUT4: Connected to the DC motors.
- GND: Connected to the ground of the circuit.
- 12V: Connected to the 12V battery.
- 5V: Connected to the 3V3 pin of the NodeMCU.
- ENA, ENB: Enable pins controlled by the NodeMCU.
- IN1 - IN4: Input pins controlled by the NodeMCU to set the direction of the motors.
vl53l0xv2
- vcc: Connected to the 3V3 pin of the NodeMCU.
- GND: Connected to the ground of the circuit.
- scl, SDA: Connected to the I2C pins of the NodeMCU.
12V Battery (Small Size)
- VCC: Connected to the step-down buck converter and the L298N motor driver.
- GND: Connected to the ground of the circuit.
Step down Buck Converter
- IN +, IN - GND: Connected to the 12V battery.
- OUT +, OUT - GND: Connected to the NodeMCUs and servomotors.
Servomotor MG995
- SIG: Signal pin connected to the NodeMCU.
- VCC: Connected to the positive output of the step-down buck converter.
- GND: Connected to the ground of the circuit.
Plastic Solenoid Valve
- pin1, pin2: Connected to the relay for control by the NodeMCU.
12v Relay
- NO, COM, NC: Normally open, common, and normally closed pins used for switching the solenoid valve.
- IN: Control pin connected to the NodeMCU.
- DC-, DC+: Connected to the ground and Vin of the NodeMCU, respectively.
Documented Code
No code has been provided for the microcontrollers. The expected code should handle the initialization and control of the GPIO pins for interfacing with the motors, servomotors, relay, and distance sensor. It should also include routines for Wi-Fi communication if remote control is required.