Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO Controlled Brushless Motor with SD Data Logging and Buzzer Alert System
Circuit Documentation
Summary
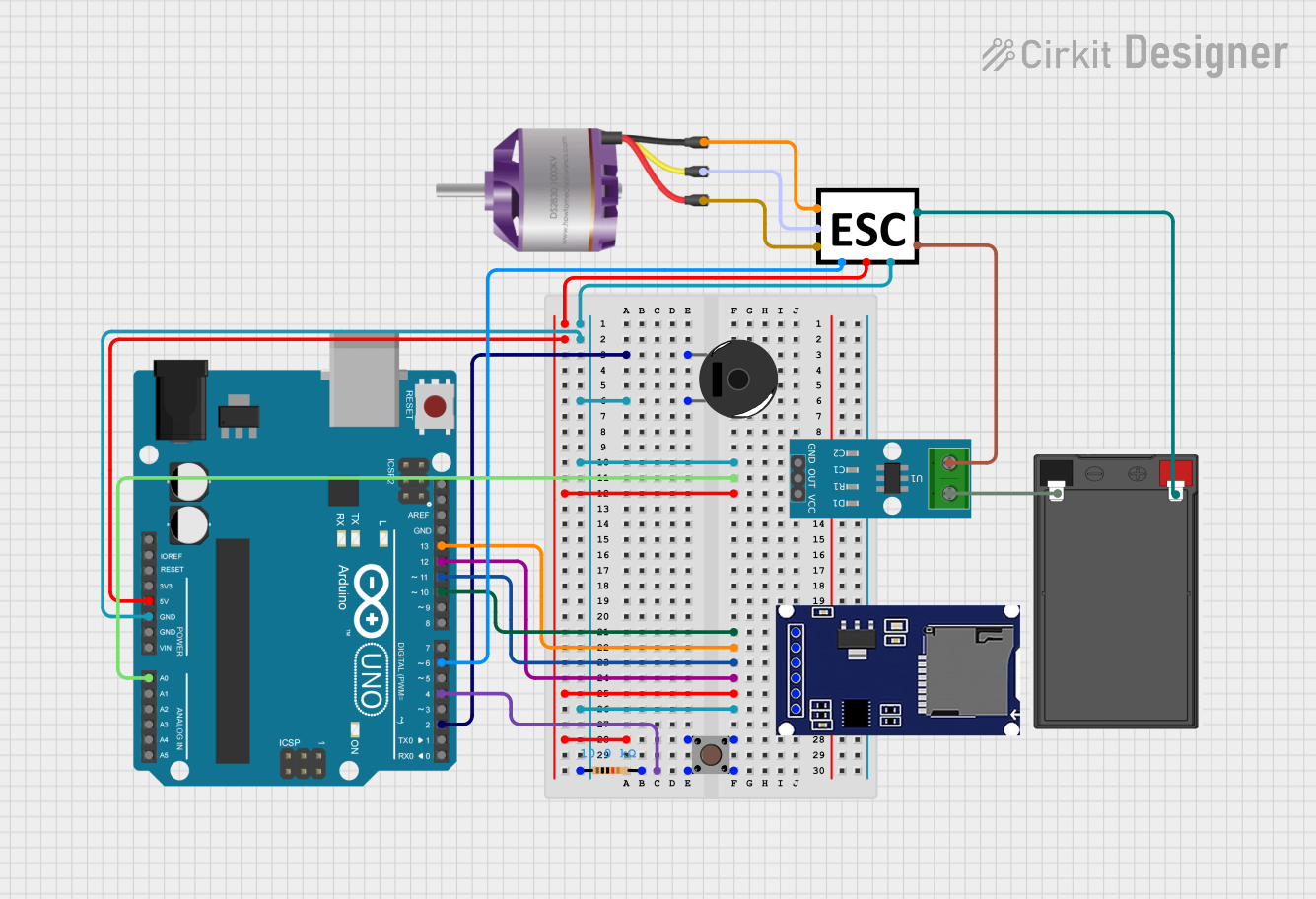
This circuit is designed to control a brushless motor using an Arduino UNO as the central processing unit. It includes a piezo buzzer for audible feedback, a pushbutton for user input, a speed controller to manage the motor's speed, and a current sensor to monitor the electrical current. Additionally, an SD module is incorporated for data logging purposes. The circuit is powered by a battery, and a resistor is used for pull-down configuration on the pushbutton.
Component List
Arduino UNO
- Microcontroller board based on the ATmega328P
- Provides digital and analog I/O pins
- Includes communication interfaces such as SPI and I2C
- Operates at 5V
Brushless Motor
- Three-phase motor that requires an electronic speed controller (ESC)
- Typically used in applications requiring high power and efficiency
Speed Controller
- Electronic Speed Controller (ESC) for brushless motors
- Provides power to the motor and controls its speed
- Accepts signal input to set motor speed
Piezo Buzzer
- An electronic device that emits sound when voltage is applied
- Used for audible alerts or feedback
Pushbutton
- A simple switch mechanism for controlling some aspect of a machine or a process
- Normally open, closes the circuit when pressed
Resistor
- A passive two-terminal electrical component that implements electrical resistance
- Used here as a pull-down resistor for the pushbutton
Battery
- Provides power to the circuit
- Voltage and capacity are not specified in the provided information
SD Module
- A module that allows the Arduino to read from and write to SD cards
- Used for data logging purposes
ACS712 Current Sensor
- A hall effect-based linear current sensor
- Capable of measuring both AC and DC currents
Wiring Details
Arduino UNO
D2connected to Piezo BuzzerGNDconnected to common ground net5Vconnected to common 5V netD10connected to SD Module (CS)D13connected to SD Module (SCK)D11connected to SD Module (MOSI)D12connected to SD Module (MISO)D4connected to Pushbutton (via Resistor)D6connected to Speed Controller (Signal)A0not connected (reserved for current sensor)
Brushless Motor
L1connected to Speed Controller (OUT3)L2connected to Speed Controller (Out 2)L3connected to Speed Controller (Out1)
Speed Controller
Signalconnected to Arduino UNO (D6)5Vconnected to common 5V netGNDconnected to common ground netV+connected to Battery (+)Out1,Out 2,OUT3connected to Brushless Motor
Piezo Buzzer
pin 1connected to Arduino UNO (D2)pin 2connected to common ground net (via Resistor)
Pushbutton
Pin 3 (out)connected to common 5V netPin 1 (in)connected to Arduino UNO (D4) (via Resistor)
Resistor
- One end connected to Pushbutton, other end to common ground net and Arduino UNO (D4)
Battery
+connected to Speed Controller (V+)-connected to ACS712 Current Sensor
SD Module
CSconnected to Arduino UNO (D10)SCKconnected to Arduino UNO (D13)MOSIconnected to Arduino UNO (D11)MISOconnected to Arduino UNO (D12)VCCconnected to common 5V netGNDconnected to common ground net
ACS712 Current Sensor
1connected to Battery (-)2connected to common ground netGNDconnected to common ground netOUTnot connected (reserved for analog input to Arduino)VCCconnected to common 5V net
Documented Code
#include <SPI.h>
#include <SD.h>
#include <Servo.h> // Include the Servo library
// Pin Definitions
const int buttonPin = 4;
const int buzzerPin = 2;
const int currentSensorPin = A0;
const int chipSelect = 10; // Pin for the SD card module
// Program Variables
File dataFile; // Create a file object to write to the SD card
Servo esc; // Create a Servo object to control the ESC
bool programStarted = false;
bool buzzerStarted = false; // Ensures buzzer only activates after button press
bool buzzerOn = false; // Tracks if the buzzer should be on
unsigned long lastBuzzerTime = 0;
unsigned long lastThrottleTime = 0;
unsigned long lastSampleTime = 0;
int buzzerCount = 0;
int throttleValue = 1000; // Start at 1000 µs (0% throttle for ESC)
bool holdingThrottle = false; // Tracks if we're in the holding phase
void setup() {
pinMode(buttonPin, INPUT); // Button with pull-down resistor
pinMode(buzzerPin, OUTPUT);
esc.attach(6); // Attach the ESC to pin 6
esc.writeMicroseconds(throttleValue); // Initialize PWM to 1000 µs
digitalWrite(buzzerPin, LOW); // Ensure buzzer is OFF initially
Serial.begin(9600); // For current data output
// Initialize the SD card
// Create a new file (or open an existing one)
dataFile = SD.open("currentData.txt", FILE_WRITE);
if (dataFile) {
Serial.println("Writing to file...");
dataFile.println("Time (ms), Current (A)"); // Header row
dataFile.close();
} else {
Serial.println("Error opening file!");
}
}
void loop() {
// Check if the button is pressed to start the program
if (digitalRead(buttonPin) == HIGH && !programStarted) {
if (!SD.begin(chipSelect)) {
Serial.println("SD card initialization failed!");
return;
}
Serial.println("SD card initialized.");
programStarted = true;
buzzerStarted = true; // Enable buzzer sequence only after button press
lastBuzzerTime = millis(); // Start the buzzer timing
buzzerCount = 0; // Reset buzzer count at program start
}
// Buzzer Activation (5 times, 0.25 second ON, 0.5 second OFF) after button press
if (buzzerStarted && buzzerCount < 5) {
unsigned long currentMillis = millis();
if (buzzerOn && currentMillis - lastBuzzerTime >= 250) { // Buzzer ON duration
digitalWrite(buzzerPin, LOW); // Turn buzzer OFF
buzzerOn = false;
lastBuzzerTime = currentMillis;
buzzerCount++; // Increase beep count after each OFF period
}
else if (!buzzerOn && currentMillis - lastBuzzerTime >= 500) { // Buzzer OFF duration
digitalWrite(buzzerPin, HIGH); // Turn buzzer ON
buzzerOn = true;
lastBuzzerTime = currentMillis;
}
}
// Throttle Ramp-Up (1000 µs to 1250 µs over 5 seconds) after buzzer completes
else if (programStarted && buzzerCount >= 5 && throttleValue < 1500 && !holdingThrottle) {
if (millis() - lastThrottleTime >= 100) {
lastThrottleTime = millis();
throttleValue += 15; // Increase PWM gradually to reach 1250 µs (approx. 25% throttle)
esc.writeMicroseconds(throttleValue); // Set ESC throttle
}
}
// Maintain 25% Throttle and Read Current Sensor Data (5 seconds at 50 Hz)
else if (programStarted && throttleValue >= 1500 && !holdingThrottle) {
holdingThrottle = true; // Enter holding phase
lastThrottleTime = millis(); // Reset timing for the hold duration
}
// Hold the throttle and read current sensor data for 5 seconds
if (holdingThrottle && millis() - lastThrottleTime < 5000) {
if (millis() - lastSampleTime >= 100) { // Sample current sensor at 50 Hz
lastSampleTime = millis();
// Read and calculate current from ACS712 sensor
int currentReading = analogRead(currentSensorPin);
float current = (currentReading - 512) *-1* (5.0 / 1024.0) / 0.066;
// Print current to Serial Monitor
Serial.println(current);
// Open the file to append the current reading with timestamp
dataFile = SD.open("test.txt", FILE_WRITE);
if (dataFile