Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino-Controlled Obstacle Avoiding Robot with Ultrasonic Sensor and Servo Motor
Circuit Documentation
Summary
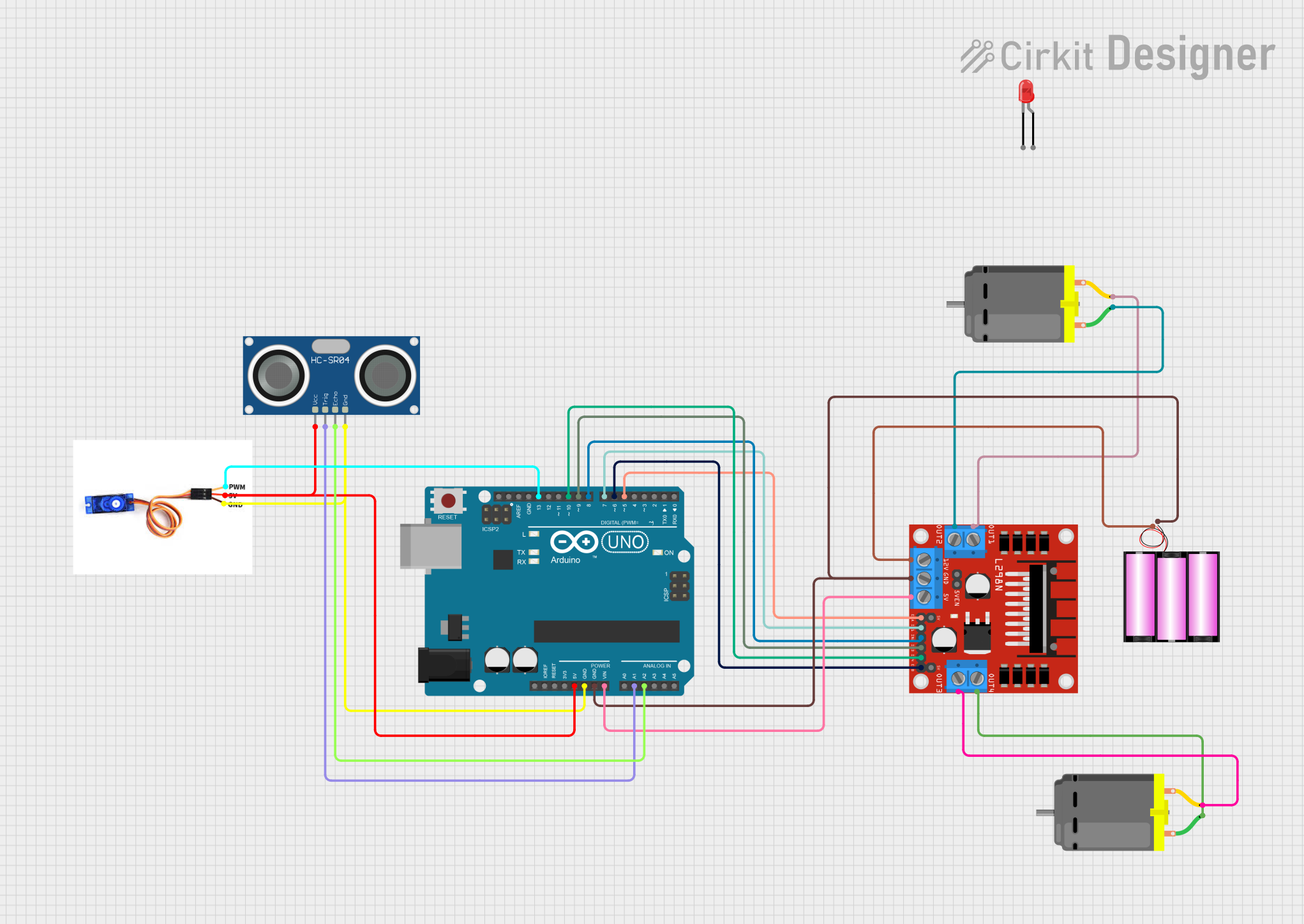
This circuit is designed to control a robot with obstacle avoidance capabilities. It uses an Arduino UNO as the central processing unit, interfaced with an HC-SR04 ultrasonic sensor for distance measurement, an SG90 servo motor for directional control, and a dual-channel L298N DC motor driver to control two DC motors for movement. The system is powered by a 12V battery, and there is also an LED for indication purposes.
Component List
Arduino UNO
- Microcontroller board based on the ATmega328P.
- It has 14 digital input/output pins, 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header, and a reset button.
HC-SR04 Ultrasonic Sensor
- An ultrasonic distance sensor that can measure distances from 2cm to 400cm with an accuracy of 3mm.
- It has four pins: VCC, TRIG, ECHO, and GND.
SG90 Servo Motor
- A small and lightweight servo motor capable of precise control.
- It operates on 5V and has three pins: PWM, 5V, and GND.
L298N DC Motor Driver
- A dual H-bridge motor driver capable of driving two DC motors or one stepper motor.
- It has several control pins for motor direction and speed, as well as power input pins.
DC Motor (x2)
- Standard DC motors used for the robot's movement.
- Each motor has two pins for electrical connection.
Battery 12V
- A 12V battery providing the power source for the motor driver and motors.
LED: Two Pin (red)
- A basic red LED with an anode and cathode for indication purposes.
Wiring Details
Arduino UNO
5Vconnected to HC-SR04 VCC and SG90 5V.GNDconnected to HC-SR04 GND and SG90 GND.Vinconnected to L298N 5V.A1connected to HC-SR04 TRIG.A2connected to HC-SR04 ECHO.D13connected to SG90 PWM.D5connected to L298N ENA.D6connected to L298N ENB.D7connected to L298N IN1.D8connected to L298N IN2.D9connected to L298N IN3.D10connected to L298N IN4.
HC-SR04 Ultrasonic Sensor
VCCconnected to Arduino UNO 5V.TRIGconnected to Arduino UNO A1.ECHOconnected to Arduino UNO A2.GNDconnected to Arduino UNO GND.
SG90 Servo Motor
PWMconnected to Arduino UNO D13.5Vconnected to Arduino UNO 5V.GNDconnected to Arduino UNO GND.
L298N DC Motor Driver
GNDconnected to Arduino UNO GND and battery 12V -.5Vconnected to Arduino UNO Vin.12Vconnected to battery 12V +.ENAconnected to Arduino UNO D5.ENBconnected to Arduino UNO D6.IN1connected to Arduino UNO D7.IN2connected to Arduino UNO D8.IN3connected to Arduino UNO D9.IN4connected to Arduino UNO D10.OUT1connected to DC Motor 1 pin 2.OUT2connected to DC Motor 1 pin 1.OUT3connected to DC Motor 2 pin 2.OUT4connected to DC Motor 2 pin 1.
DC Motor
- Motor 1:
pin 1connected to L298N OUT2,pin 2connected to L298N OUT1. - Motor 2:
pin 1connected to L298N OUT4,pin 2connected to L298N OUT3.
Battery 12V
+connected to L298N 12V.-connected to L298N GND.
LED: Two Pin (red)
anodeandcathodenot connected in the provided net list.
Documented Code
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a servo object to control the servo
#define enA 5 // Enable1 L298 Pin enA
#define in1 7 // Motor1 L298 Pin in1
#define in2 8 // Motor1 L298 Pin in2
#define in3 9 // Motor2 L298 Pin in3
#define in4 10 // Motor2 L298 Pin in4
#define enB 6 // Enable2 L298 Pin enB
#define echo A2 // Echo pin
#define trigger A1 // Trigger pin
#define servoPin 13 // Define the pin for the servo
int Set = 20; // Set distance threshold in cm
int distance_L, distance_F, distance_R;
void setup() {
Serial.begin(9600); // start serial communication at 9600bps
pinMode(echo, INPUT); // declare ultrasonic sensor Echo pin as input
pinMode(trigger, OUTPUT); // declare ultrasonic sensor Trigger pin as Output
pinMode(enA, OUTPUT); // declare as output for L298 Pin enA
pinMode(in1, OUTPUT); // declare as output for L298 Pin in1
pinMode(in2, OUTPUT); // declare as output for L298 Pin in2
pinMode(in3, OUTPUT); // declare as output for L298 Pin in3
pinMode(in4, OUTPUT); // declare as output for L298 Pin in4
pinMode(enB, OUTPUT); // declare as output for L298 Pin enB
analogWrite(enA, 130); // Set speed for Motor1
analogWrite(enB, 130); // Set speed for Motor2
myServo.attach(servoPin); // Attach the servo to pin 13
// Sweep the servo from 70° to 140° and back
for (int angle = 70; angle <= 140; angle += 5) {
myServo.write(angle);
delay(100);
}
for (int angle = 140; angle >= 0; angle -= 5) {
myServo.write(angle);
delay(100);
}
for (int angle = 0; angle <= 70; angle += 5) {
myServo.write(angle);
delay(100);
}
distance_F = Ultrasonic_read(); // Initial ultrasonic reading
delay(500);
}
void loop() {
// Obstacle Avoiding Logic
distance_F = Ultrasonic_read();
Serial.print("D F="); Serial.println(distance_F);
// If no obstacle ahead, move forward
if (distance_F > Set) {
forword();
} else {
// Check left and right sides if obstacle is detected ahead
Check_side();
}
delay(10); // Short delay for stability
}
// Function to read the ultrasonic sensor
long Ultrasonic_read() {
digitalWrite(trigger, LOW); // Ensure trigger is LOW for a few microseconds
delayMicroseconds(5);
digitalWrite(trigger, HIGH); // Send 10-microsecond pulse to trigger the sensor
delayMicroseconds(10);
digitalWrite(trigger, LOW); // Turn off trigger
long time = pulseIn(echo, HIGH, 38000); // Limit to 38ms (max distance ~6.5m)
if (time == 0) {
Serial.println("No echo detected");
return 9999; // Return large value if no echo is detected
}
long distance = time / 29 / 2; // Convert time to distance in cm
Serial.print("Distance: "); Serial.println(distance);
return distance;
}
void compareDistance() {
if (distance_L > distance_R) {
turnLeft();
delay(200);
forword();
delay(700);
turnRight();
delay(500);
} else {
turnRight();
delay(300);
forword();
delay(700);
turnLeft();
delay(500);
}
}
void Check_side() {
Stop(); // Stop the robot before checking sides
delay(100);
// Move servo to check right side
Serial.println("Checking Right");
myServo.write(140);
delay(300);
distance_R = Ultrasonic_read();
Serial.print("D R="); Serial.println(distance_R);
delay(100);
// Move servo to check left side
Serial.println("Checking Left");
myServo.write(0);
delay(500);
distance_L = Ultrasonic_read();
Serial.print("D L="); Serial.println(distance_L);
delay(100);
// Reset servo to center
myServo.write(70);
delay