Wi-Fi Controlled Robotic Arm with ESP32 and MPU-6050
Circuit Documentation
Summary
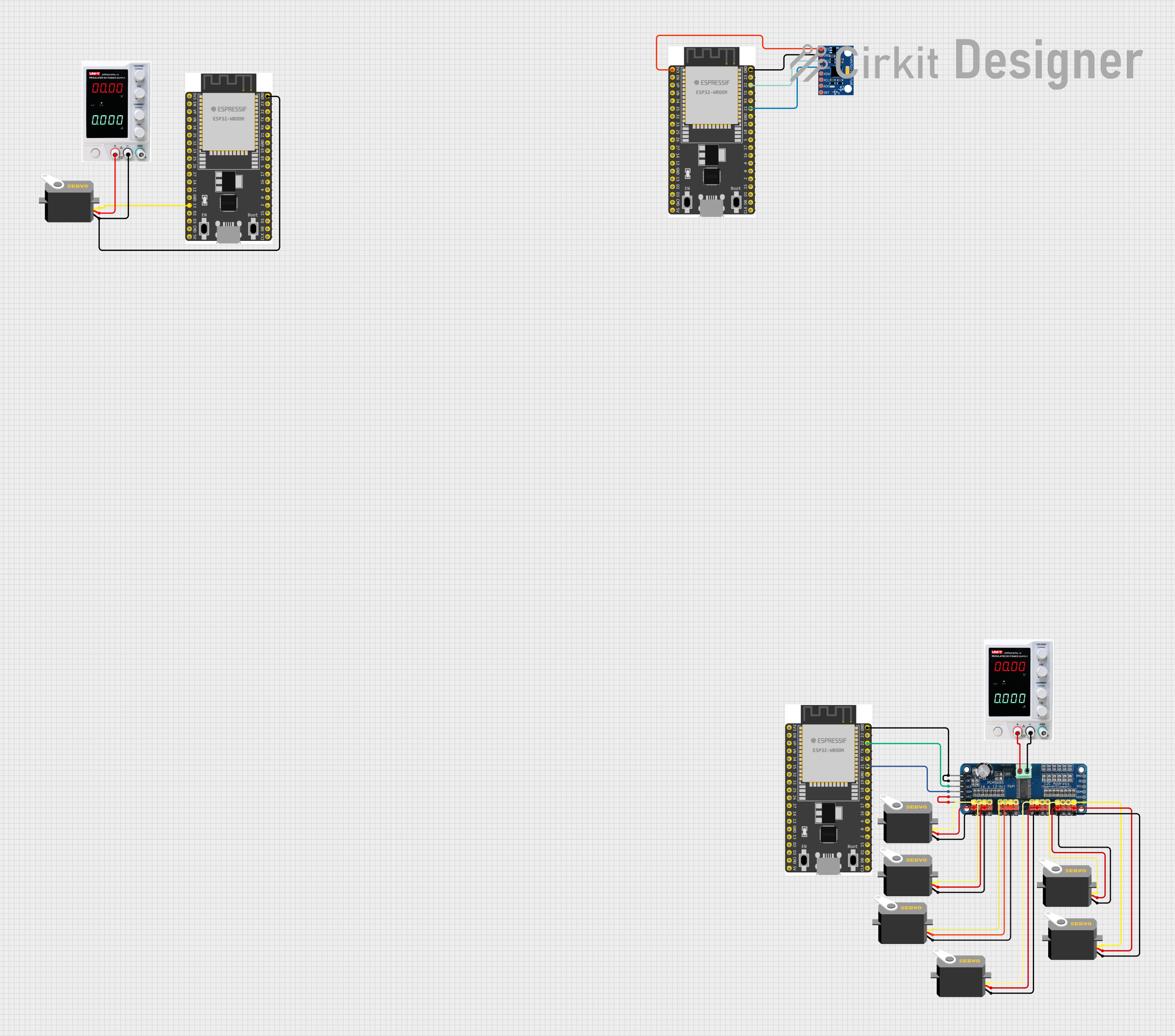
This circuit involves multiple components including ESP32 Wroom Dev Kits, a 16-Channel PWM Servo Driver, an MPU-6050 sensor, several Servo motors, and Power Supplies. The ESP32 microcontrollers are used to control the servos and communicate with the MPU-6050 sensor. The 16-Channel PWM Servo Driver is used to manage multiple servos. Power supplies are used to provide the necessary voltage and current to the components.
Component List
Servo
- Description: A servo motor used for precise control of angular position.
- Pins: gnd, vcc, pulse
MPU-6050
- Description: A 6-axis motion tracking device that combines a 3-axis gyroscope and a 3-axis accelerometer.
- Pins: VCC, GND, SCL, SDA, XDA, XCL, AD0, INT
ESP32 Wroom Dev Kit
- Description: A development board for the ESP32 microcontroller, which includes Wi-Fi and Bluetooth capabilities.
- Pins: 3V3, EN, VP, VN, GPIO 34, GPIO 35, GPIO 32, GPIO 33, GPIO 25, GPIO 26, GPIO 27, GPIO 14, GND, GPIO 13, SD2, SD3, CMD, V5, GPIO 23, GPIO 22, TXD, RXD, GPIO 21, GPIO 19, GPIO 18, GPIO 5, GPIO 17, GPIO 16, GPIO 4, GPIO 0, GPIO 2, GPIO 15, SD1, SD0, CLK
Power Supply
- Description: Provides the necessary power to the circuit components.
- Pins: +, -, GND
16-Channel PWM Servo Driver
- Description: A driver board used to control up to 16 servo motors via PWM signals.
- Pins: V+, VCC, SDA, SCL, OE, GND, Vin+, Vin-, PWM1, PWM2, PWM3, PWM4, PWM5, PWM6, PWM7, PWM8, PWM9, PWM10, PWM11, PWM12, PWM13, PWM14, PWM15, PWM16
Wiring Details
Servo
Servo 1:
- gnd: Connected to GND of ESP32 and Power Supply
- vcc: Connected to + of Power Supply
- pulse: Connected to GPIO 13 of ESP32
Servo 2:
- gnd: Connected to GND of 16-Channel PWM Servo Driver
- vcc: Connected to V+ of 16-Channel PWM Servo Driver
- pulse: Connected to PWM1 of 16-Channel PWM Servo Driver
Servo 3:
- gnd: Connected to GND of 16-Channel PWM Servo Driver
- vcc: Connected to V+ of 16-Channel PWM Servo Driver
- pulse: Connected to PWM3 of 16-Channel PWM Servo Driver
Servo 4:
- gnd: Connected to GND of 16-Channel PWM Servo Driver
- vcc: Connected to V+ of 16-Channel PWM Servo Driver
- pulse: Connected to PWM7 of 16-Channel PWM Servo Driver
Servo 5:
- gnd: Connected to GND of 16-Channel PWM Servo Driver
- vcc: Connected to V+ of 16-Channel PWM Servo Driver
- pulse: Connected to PWM10 of 16-Channel PWM Servo Driver
Servo 6:
- gnd: Connected to GND of 16-Channel PWM Servo Driver
- vcc: Connected to V+ of 16-Channel PWM Servo Driver
- pulse: Connected to PWM13 of 16-Channel PWM Servo Driver
Servo 7:
- gnd: Connected to GND of 16-Channel PWM Servo Driver
- vcc: Connected to V+ of 16-Channel PWM Servo Driver
- pulse: Connected to PWM16 of 16-Channel PWM Servo Driver
MPU-6050
- VCC: Connected to 3V3 of ESP32
- GND: Connected to GND of ESP32
- SCL: Connected to GPIO 22 of ESP32
- SDA: Connected to GPIO 21 of ESP32
ESP32 Wroom Dev Kit
ESP32 1:
- GPIO 13: Connected to pulse of Servo 1
- GND: Connected to gnd of Servo 1 and - of Power Supply
ESP32 2:
- 3V3: Connected to VCC of MPU-6050
- GND: Connected to GND of MPU-6050
- GPIO 22: Connected to SCL of MPU-6050
- GPIO 21: Connected to SDA of MPU-6050
ESP32 3:
- GPIO 21: Connected to SDA of 16-Channel PWM Servo Driver
- GPIO 22: Connected to SCL of 16-Channel PWM Servo Driver
- GND: Connected to GND of 16-Channel PWM Servo Driver
Power Supply
Power Supply 1:
- -: Connected to GND of ESP32 and Servo 1
- +: Connected to vcc of Servo 1
Power Supply 2:
- +: Connected to Vin+ of 16-Channel PWM Servo Driver
- -: Connected to Vin- of 16-Channel PWM Servo Driver
16-Channel PWM Servo Driver
- V+: Connected to vcc of Servos 2-7
- GND: Connected to gnd of Servos 2-7
- SDA: Connected to GPIO 21 of ESP32
- SCL: Connected to GPIO 22 of ESP32
- OE: Connected to GND of ESP32
- Vin+: Connected to + of Power Supply
- Vin-: Connected to - of Power Supply
Code
No code was provided for the microcontrollers in this circuit.
This documentation provides a comprehensive overview of the circuit, including a summary, detailed component list, wiring details, and code section. Each component and its connections are clearly described to facilitate understanding and replication of the circuit.