Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO-Based Ultrasonic Sensor-Controlled DC Motor System with L298N Driver
Circuit Documentation
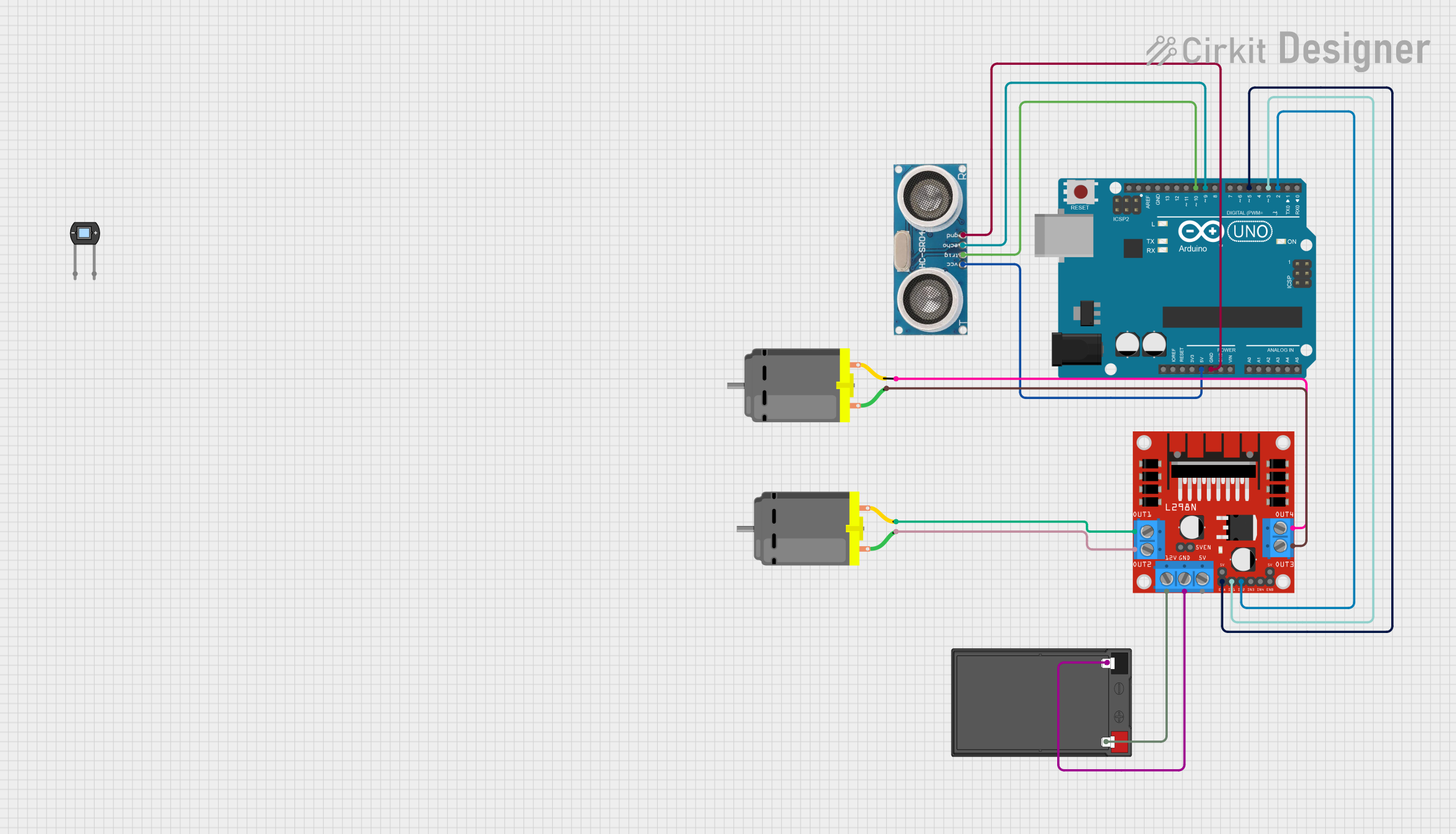
Summary
This circuit is designed to control a DC motor using an L298N motor driver and an ultrasonic sensor, all managed by an Arduino UNO. The ultrasonic sensor detects clicks based on distance measurements, and the motor responds by moving forward on a single click and backward on a double click.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
Ultrasonic Sensor
- Description: A sensor used to measure distance by using ultrasonic waves.
- Pins: +VCC, Trigger, Echo, GND
L298N DC Motor Driver
- Description: A dual H-Bridge motor driver that allows control of two DC motors.
- Pins: OUT1, OUT2, 12V, GND, 5V, OUT3, OUT4, 5V-ENA-JMP-I, 5V-ENA-JMP-O, +5V-J1, +5V-J2, ENA, IN1, IN2, IN3, IN4, ENB
12V 7Ah Battery
- Description: A rechargeable battery providing 12V power.
- Pins: 12v +, 12v -
DC Motor
- Description: A motor that runs on direct current (DC).
- Pins: pin 1, pin 2
Photodiode
- Description: A semiconductor device that converts light into an electrical current.
- Pins: cathode, anode
Wiring Details
Arduino UNO
- 5V connected to +VCC of the Ultrasonic Sensor
- GND connected to GND of the Ultrasonic Sensor
- D10 connected to Trigger of the Ultrasonic Sensor
- D9 connected to Echo of the Ultrasonic Sensor
- D5 connected to ENA of the L298N DC Motor Driver
- D3 connected to IN1 of the L298N DC Motor Driver
- D2 connected to IN2 of the L298N DC Motor Driver
Ultrasonic Sensor
- +VCC connected to 5V of the Arduino UNO
- GND connected to GND of the Arduino UNO
- Trigger connected to D10 of the Arduino UNO
- Echo connected to D9 of the Arduino UNO
L298N DC Motor Driver
- ENA connected to D5 of the Arduino UNO
- IN1 connected to D3 of the Arduino UNO
- IN2 connected to D2 of the Arduino UNO
- OUT1 connected to pin 2 of the first DC Motor
- OUT2 connected to pin 1 of the first DC Motor
- OUT3 connected to pin 1 of the second DC Motor
- OUT4 connected to pin 2 of the second DC Motor
- 12V connected to 12v + of the 12V 7Ah Battery
- GND connected to 12v - of the 12V 7Ah Battery
12V 7Ah Battery
- 12v + connected to 12V of the L298N DC Motor Driver
- 12v - connected to GND of the L298N DC Motor Driver
DC Motor (First)
- pin 1 connected to OUT2 of the L298N DC Motor Driver
- pin 2 connected to OUT1 of the L298N DC Motor Driver
DC Motor (Second)
- pin 1 connected to OUT3 of the L298N DC Motor Driver
- pin 2 connected to OUT4 of the L298N DC Motor Driver
Code Documentation
/*
* This Arduino sketch controls a DC motor using an L298N motor driver and an
* ultrasonic sensor. A single click on the ultrasonic sensor triggers the motor
* to move forward, while a double click triggers the motor to move backward.
*/
// Pin definitions
const int triggerPin = 10;
const int echoPin = 9;
const int motorENAPin = 5;
const int motorIN1Pin = 3;
const int motorIN2Pin = 2;
// Variables for ultrasonic sensor
long duration;
int distance;
// Variables for click detection
unsigned long lastClickTime = 0;
int clickCount = 0;
void setup() {
// Initialize serial communication
Serial.begin(9600);
// Initialize motor control pins
pinMode(motorENAPin, OUTPUT);
pinMode(motorIN1Pin, OUTPUT);
pinMode(motorIN2Pin, OUTPUT);
// Initialize ultrasonic sensor pins
pinMode(triggerPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
// Measure distance using ultrasonic sensor
distance = measureDistance();
// Check for clicks
if (distance < 10) { // Assuming a click is detected when distance < 10 cm
unsigned long currentTime = millis();
if (currentTime - lastClickTime < 500) { // Double click detected
clickCount++;
} else { // Single click detected
clickCount = 1;
}
lastClickTime = currentTime;
}
// Perform actions based on click count
if (clickCount == 1) {
moveForward();
} else if (clickCount == 2) {
moveBackward();
clickCount = 0; // Reset click count after double click
}
delay(100); // Small delay to debounce
}
int measureDistance() {
// Clear the trigger pin
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
// Set the trigger pin HIGH for 10 microseconds
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
// Read the echo pin
duration = pulseIn(echoPin, HIGH);
// Calculate the distance
int distance = duration * 0.034 / 2;
return distance;
}
void moveForward() {
digitalWrite(motorENAPin, HIGH);
digitalWrite(motorIN1Pin, HIGH);
digitalWrite(motorIN2Pin, LOW);
}
void moveBackward() {
digitalWrite(motorENAPin, HIGH);
digitalWrite(motorIN1Pin, LOW);
digitalWrite(motorIN2Pin, HIGH);
}
This code initializes the pins for the motor driver and ultrasonic sensor, measures the distance using the ultrasonic sensor, and controls the motor based on the detected clicks.