Raspberry Pi Pico-Controlled Automatic Golf Tee System with PIR Sensor and H-Bridge Motor Driver
Automatic Golf Tee System Circuit Documentation
Summary
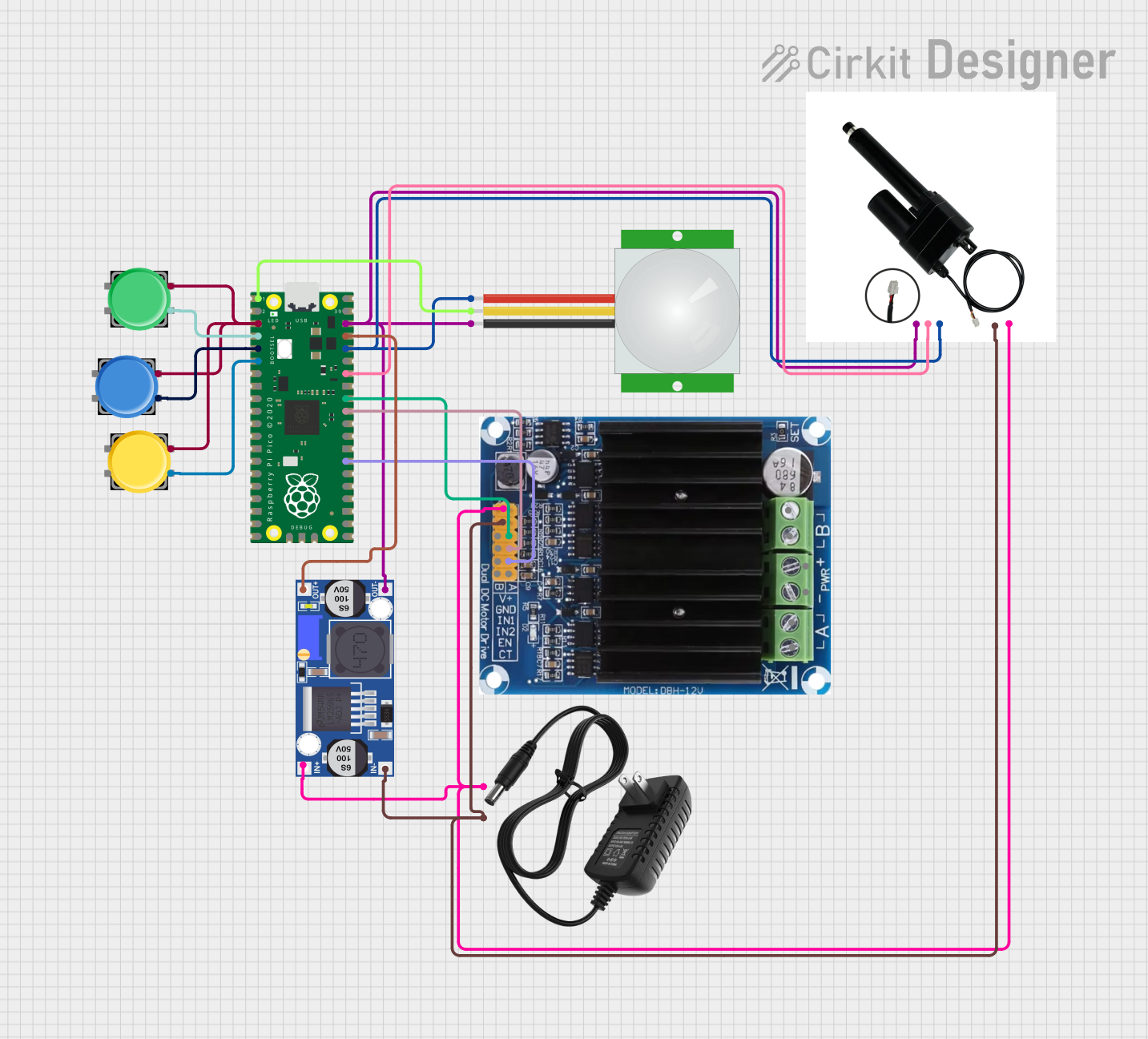
The Automatic Golf Tee System is designed to automate the process of raising a golf ball to a desired height on a tee using a Raspberry Pi Pico microcontroller. The system utilizes a PIR sensor to detect the presence of a golf ball, pushbuttons to control the height adjustment, an H-bridge motor driver to control a linear actuator, and a power supply system consisting of a 12V power supply and a buck converter to provide the necessary voltages for the components.
Component List
Raspberry Pi Pico
- Microcontroller board with a variety of GPIO pins used for interfacing with sensors, buttons, and motor drivers.
PIR Sensor
- A motion sensor that detects the presence of a golf ball on the tee.
Pushbuttons (3x)
- Buttons that allow the user to raise the tee, increase the height, and decrease the height.
DBH-12 H Bridge Motor Driver
- A motor driver that controls the direction and speed of the linear actuator.
Linear Actuator
- An actuator that physically raises and lowers the golf tee to the desired height.
12V Power Supply
- Provides the main power source for the motor driver and the linear actuator.
Buck Converter
- Steps down the voltage from the 12V power supply to a lower voltage suitable for the Raspberry Pi Pico and other logic-level components.
Wiring Details
Raspberry Pi Pico
pin 1connected to PIR sensor signal output (SIG)pin 3,pin 4,pin 5,pin 6connected to pushbutton pins 1 and 3 (common connections for all pushbuttons)pin 27connected to H-bridge motor driver enable pin (EN (A))pin 31connected to H-bridge motor driver input 2 (IN2 (A))pin 32connected to H-bridge motor driver input 1 (IN1 (A))pin 34connected to linear actuator potentiometer signal output (2. Signal: Wiper)pin 36connected to PIR sensor VDD and linear actuator logic voltage (1. Vcc)pin 37connected to buck converter output positive (OUT+)pin 38connected to common ground for PIR sensor, linear actuator potentiometer ground, and buck converter output negative (OUT-)
PIR Sensor
VDDconnected to Raspberry Pi Picopin 36and linear actuator logic voltageSIGconnected to Raspberry Pi Picopin 1GNDconnected to common ground
Pushbuttons (3x)
Pin 1of all pushbuttons connected together and to Raspberry Pi Picopin 3Pin 3of each pushbutton connected to Raspberry Pi Picopin 4,pin 5, andpin 6respectively
DBH-12 H Bridge Motor Driver
EN (A)connected to Raspberry Pi Picopin 27IN2 (A)connected to Raspberry Pi Picopin 31IN1 (A)connected to Raspberry Pi Picopin 32GNDconnected to common groundMotor V+connected to linear actuator motor power supply +12V and buck converter input positive (IN+)
Linear Actuator
+12V - actuator motor power supply +12Vconnected to H-bridge motor driverMotor V+and buck converter input positive (IN+)GND - actuator motor power supply groundconnected to common ground3.GND - Potentiometer groundconnected to common ground2. Signal: Wiper - potentiometer signal outputconnected to Raspberry Pi Picopin 341. Vcc: Logic voltage for the potentiometerconnected to Raspberry Pi Picopin 36
12V Power Supply
+connected to H-bridge motor driverMotor V+, linear actuator motor power supply +12V, and buck converter input positive (IN+)-connected to common ground
Buck Converter
IN+connected to 12V power supply+IN-connected to common groundOUT+connected to Raspberry Pi Picopin 37OUT-connected to common ground
Documented Code
/*
* Automatic Golf Tee System
*
* This code controls an automatic golf tee system using a Raspberry Pi Pico.
* A presence sensor detects whether a ball is on the tee. If a ball is present,
* a pushbutton allows the tee to raise the ball to a commanded height. An up
* button and a down button can be used to adjust the current height of the tee.
* The height is saved as the starting position for the next time it is raised.
* When the ball is hit and its presence is no longer detected, the tee lowers
* completely until a new ball is loaded. It then waits for the button press to
* raise the tee again.
*/
#include <Servo.h>
const int presenceSensorPin = 1; // PIR sensor signal pin
const int raiseButtonPin = 4; // Pushbutton to raise the tee
const int upButtonPin = 3; // Button to increase the height
const int downButtonPin = 5; // Button to decrease the height
// Define new pins for the H-bridge motor driver
const int motorPin1 = 32; // IN1 on H-bridge
const int motorPin2 = 31; // IN2 on H-bridge
const int enablePin = 27; // ENA on H-bridge (PWM control)
Servo teeServo;
int currentHeight = 0;
const int minHeight = 0;
const int maxHeight = 180;
bool ballPresent = false;
void setup() {
pinMode(presenceSensorPin, INPUT);
pinMode(raiseButtonPin, INPUT_PULLUP);
pinMode(upButtonPin, INPUT_PULLUP);
pinMode(downButtonPin, INPUT_PULLUP);
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(enablePin, OUTPUT);
// Initialize the linear actuator to the minimum height
setHeight(minHeight);
}
void loop() {
ballPresent = digitalRead(presenceSensorPin) == HIGH;
if (ballPresent) {
if (digitalRead(raiseButtonPin) == LOW) {
setHeight(currentHeight);
}
if (digitalRead(upButtonPin) == LOW) {
if (currentHeight < maxHeight) {
currentHeight += 5;
setHeight(currentHeight);
delay(200); // Debounce delay
}
}
if (digitalRead(downButtonPin) == LOW) {
if (currentHeight > minHeight) {
currentHeight -= 5;
setHeight(currentHeight);
delay(200); // Debounce delay
}
}
} else {
setHeight(minHeight);
}
}
void setHeight(int height) {
// Control the linear actuator to move to the desired height
// This is a placeholder function. You need to implement the actual control logic
// based on your linear actuator's specifications.
// Example: Move forward
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
analogWrite(enablePin, map(height, minHeight, maxHeight, 0, 255));
// Add logic to stop the motor when the desired height is reached
}
This code is responsible for controlling the golf tee system. It reads inputs from the PIR sensor and pushbuttons to adjust the height of the tee using the linear actuator. The setHeight function is a placeholder and should be implemented according to the specific linear actuator used in the system.