Arduino Nano-Controlled Robotic Vehicle with Ultrasonic Sensor and Laser Module
Circuit Documentation
Summary of the Circuit
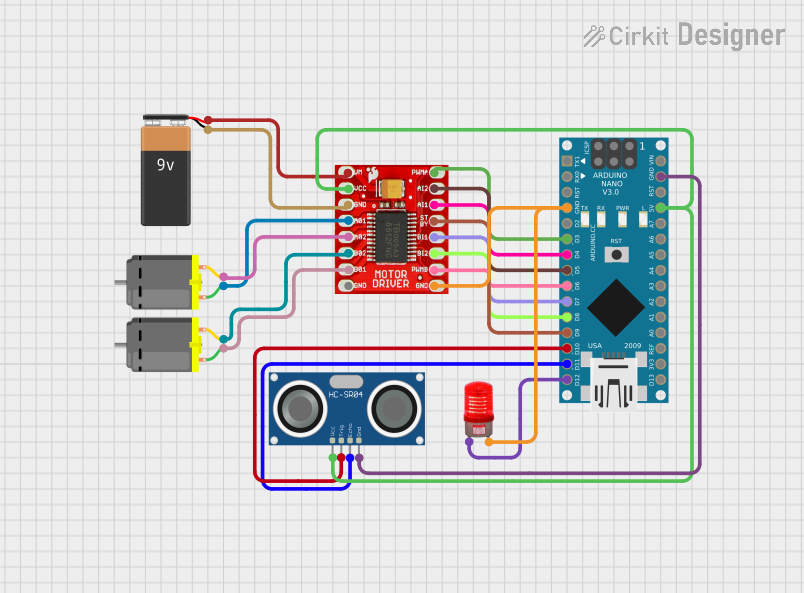
This circuit is designed to control a pair of DC motors using an Arduino Nano microcontroller and a TB6612FNG Motor Driver. It also includes a laser module and an HC-SR04 Ultrasonic Sensor for additional functionalities such as distance measurement or object detection. The circuit is powered by a 9V battery, which provides the necessary voltage for the motor driver and the motors. The Arduino Nano interfaces with the motor driver to control the speed and direction of the motors, and it also manages the signals for the ultrasonic sensor and the laser module.
Component List
Arduino Nano
- Microcontroller board based on the ATmega328P
- It has a variety of digital and analog I/O pins for interfacing with various components.
DC Motor (x2)
- Electric motor that converts DC electrical power into mechanical power.
- Typically used for driving wheels or other rotating parts.
TB6612FNG Motor Driver
- A motor driver IC that can control up to two DC motors.
- It has inputs for controlling the speed and direction of each motor.
Laser Module
- A module that emits a focused beam of light.
- Can be used for distance measurement, object detection, or as a visual indicator.
HC-SR04 Ultrasonic Sensor
- A sensor that measures distance by emitting ultrasonic waves and measuring the time it takes for the echo to return.
- Commonly used in robotics for obstacle avoidance or distance measurement.
9V Battery
- A standard 9V battery used to provide power to the circuit.
Wiring Details
Arduino Nano
- GND connected to the ground of the motor driver, laser module, ultrasonic sensor, and 9V battery.
- D3 connected to the PWMA pin of the motor driver.
- D4 connected to the AI1 pin of the motor driver.
- D5 connected to the AI2 pin of the motor driver.
- D6 connected to the PWMB pin of the motor driver.
- D7 connected to the BI1 pin of the motor driver.
- D8 connected to the BI2 pin of the motor driver.
- D9 connected to the STBY pin of the motor driver.
- D10 connected to the TRIG pin of the ultrasonic sensor.
- D11/MOSI connected to the ECHO pin of the ultrasonic sensor.
- D12/MISO connected to the "+" pin of the laser module.
- 5V connected to the VCC pin of the ultrasonic sensor and the VCC pin of the motor driver.
DC Motor #1
- Pin 1 connected to the B01 pin of the motor driver.
- Pin 2 connected to the B02 pin of the motor driver.
DC Motor #2
- Pin 1 connected to the A01 pin of the motor driver.
- Pin 2 connected to the A02 pin of the motor driver.
TB6612FNG Motor Driver
- GND connected to the ground of the Arduino Nano, laser module, and 9V battery.
- VCC connected to the 5V pin of the Arduino Nano.
- VM connected to the "+" pin of the 9V battery.
Laser Module
- - connected to the ground of the Arduino Nano.
- + connected to the D12/MISO pin of the Arduino Nano.
HC-SR04 Ultrasonic Sensor
- GND connected to the ground of the Arduino Nano.
- VCC connected to the 5V pin of the Arduino Nano.
- TRIG connected to the D10 pin of the Arduino Nano.
- ECHO connected to the D11/MOSI pin of the Arduino Nano.
9V Battery
- - connected to the ground of the motor driver.
- + connected to the VM pin of the motor driver.
Documented Code
Arduino Nano Code (sketch.ino)
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
This code is a template and does not contain any specific functionality. It provides the basic structure for an Arduino sketch with setup() and loop() functions. The setup() function is intended to contain initialization code that runs once when the microcontroller is powered on or reset. The loop() function is intended to contain the main logic of the program, which runs repeatedly as long as the microcontroller is powered.
Additional Notes (documentation.txt)
No additional code documentation was provided for this file.