Arduino UNO-Based Autonomous Robot with Ultrasonic and IR Sensors, Bluetooth Control, and Battery Power
Circuit Documentation
Summary
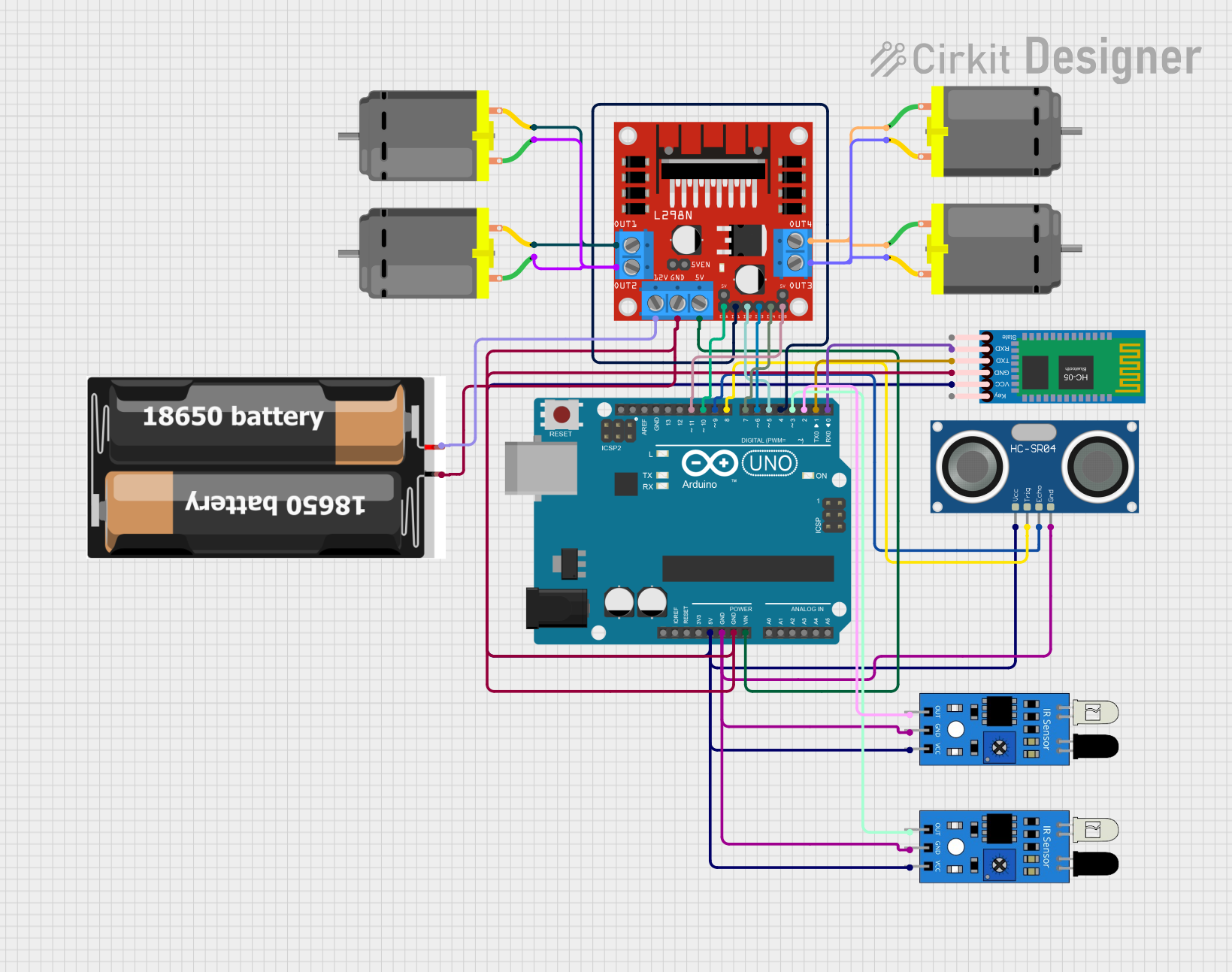
This circuit is designed to control a set of DC motors using an Arduino UNO, an L298N motor driver, and various sensors including an HC-SR04 Ultrasonic Sensor, IR sensors, and an HC-05 Bluetooth Module. The circuit is powered by a 2x 18650 battery pack. The Arduino UNO is programmed to control the motor driver based on sensor inputs.
Component List
Arduino UNO
- Description: Microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
HC-SR04 Ultrasonic Sensor
- Description: Ultrasonic distance sensor.
- Pins: VCC, TRIG, ECHO, GND
2x 18650 Battery Pack
- Description: Battery pack providing power to the circuit.
- Pins: vcc, gnd
IR Sensor
- Description: Infrared sensor for obstacle detection.
- Pins: out, gnd, vcc
L298N DC Motor Driver
- Description: Dual H-Bridge motor driver.
- Pins: OUT1, OUT2, 12V, GND, 5V, OUT3, OUT4, 5V-ENA-JMP-I, 5V-ENA-JMP-O, +5V-J1, +5V-J2, ENA, IN1, IN2, IN3, IN4, ENB
HC-05 Bluetooth Module
- Description: Bluetooth module for wireless communication.
- Pins: Key, VCC, GND, TXD, RXD, State
DC Motor
- Description: Standard DC motor.
- Pins: pin 1, pin 2
Wiring Details
Arduino UNO
5V connected to:
- VCC of IR Sensor
- VCC of HC-SR04 Ultrasonic Sensor
- VCC of HC-05 Bluetooth Module
- VCC of another IR Sensor
GND connected to:
- GND of IR Sensor
- GND of HC-SR04 Ultrasonic Sensor
- GND of another IR Sensor
- GND of 2x 18650 Battery Pack
- GND of L298N DC Motor Driver
- GND of HC-05 Bluetooth Module
Vin connected to:
- 5V of L298N DC Motor Driver
D11 connected to:
- ENB of L298N DC Motor Driver
D10 connected to:
- ENA of L298N DC Motor Driver
D9 connected to:
- ECHO of HC-SR04 Ultrasonic Sensor
D8 connected to:
- TRIG of HC-SR04 Ultrasonic Sensor
D7 connected to:
- IN4 of L298N DC Motor Driver
D6 connected to:
- IN3 of L298N DC Motor Driver
D5 connected to:
- IN2 of L298N DC Motor Driver
D4 connected to:
- IN1 of L298N DC Motor Driver
D3 connected to:
- out of IR Sensor
D2 connected to:
- out of another IR Sensor
D1 connected to:
- TXD of HC-05 Bluetooth Module
D0 connected to:
- RXD of HC-05 Bluetooth Module
HC-SR04 Ultrasonic Sensor
VCC connected to:
- 5V of Arduino UNO
GND connected to:
- GND of Arduino UNO
TRIG connected to:
- D8 of Arduino UNO
ECHO connected to:
- D9 of Arduino UNO
2x 18650 Battery Pack
vcc connected to:
- 12V of L298N DC Motor Driver
gnd connected to:
- GND of Arduino UNO
IR Sensor
vcc connected to:
- 5V of Arduino UNO
gnd connected to:
- GND of Arduino UNO
out connected to:
- D3 of Arduino UNO
Another IR Sensor
vcc connected to:
- 5V of Arduino UNO
gnd connected to:
- GND of Arduino UNO
out connected to:
- D2 of Arduino UNO
L298N DC Motor Driver
5V connected to:
- Vin of Arduino UNO
GND connected to:
- GND of Arduino UNO
12V connected to:
- vcc of 2x 18650 Battery Pack
ENB connected to:
- D11 of Arduino UNO
ENA connected to:
- D10 of Arduino UNO
IN4 connected to:
- D7 of Arduino UNO
IN3 connected to:
- D6 of Arduino UNO
IN2 connected to:
- D5 of Arduino UNO
IN1 connected to:
- D4 of Arduino UNO
OUT1 connected to:
- pin 2 of DC Motor
- pin 2 of another DC Motor
OUT2 connected to:
- pin 1 of DC Motor
- pin 1 of another DC Motor
OUT3 connected to:
- pin 2 of another DC Motor
- pin 2 of another DC Motor
OUT4 connected to:
- pin 1 of another DC Motor
- pin 1 of another DC Motor
HC-05 Bluetooth Module
VCC connected to:
- 5V of Arduino UNO
GND connected to:
- GND of Arduino UNO
TXD connected to:
- D1 of Arduino UNO
RXD connected to:
- D0 of Arduino UNO
Code Documentation
#define Trig 8
#define Echo 9
const int in21 = 4; // L298N-2 pin 4
const int in22 = 5; // L298N-2 pin 5
const int in23 = 6; // L298N-2 pin 6
const int in24 = 7; // L298N-2 pin 7
const int enA = 10; // L298N-2 pin 10
const int enB = 11; // L298N-2 pin 11
void setup()
{
pinMode(Trig, OUTPUT); // выход
pinMode(Echo, INPUT); // вход
pinMode(in21, OUTPUT); // выход на L298n
pinMode(in22, OUTPUT); // выход на L298n
pinMode(in23, OUTPUT); // выход на L298n
pinMode(in24, OUTPUT); // выход на L298n
}
unsigned int impulseTime=0;
unsigned int distance_sm=0;
void loop()
{
digitalWrite(Trig, HIGH);
delayMicroseconds(10); // 10 микросекунд
digitalWrite(Trig, LOW);
impulseTime=pulseIn(Echo, HIGH); // замеряем длину импульса
distance_sm=impulseTime/58; // переводим в сантиметры
if (distance_sm>25) // если расстояние более 25 сантиметров
{
digitalWrite(in21, LOW);
digitalWrite(in22, HIGH);
analogWrite(enA, 60);
analogWrite(enB, 60);
digitalWrite(in23, HIGH);
digitalWrite(in24, LOW);
}
else
{
digitalWrite(in21, HIGH);
digitalWrite(in22, LOW);
analogWrite(enA, 100);
analogWrite(enB, 100);
digitalWrite(in23, HIGH);
digitalWrite(in24, LOW);
delay(1100); // если застряет или не выезжает из угла - измените время поворота. сейчас там стоит 1,1 с.
}
delay(50);
}
This code is designed to control the L298N motor driver based on the distance measured by the HC-SR04 Ultrasonic Sensor. The motors are controlled to move forward if the distance is greater than 25 cm and to turn if the distance is less than 25 cm. The IR sensors and Bluetooth module are also connected but not utilized in this code snippet.