Arduino-Controlled Bluetooth Robot with Ultrasonic Sensors
Circuit Documentation
Summary of the Circuit
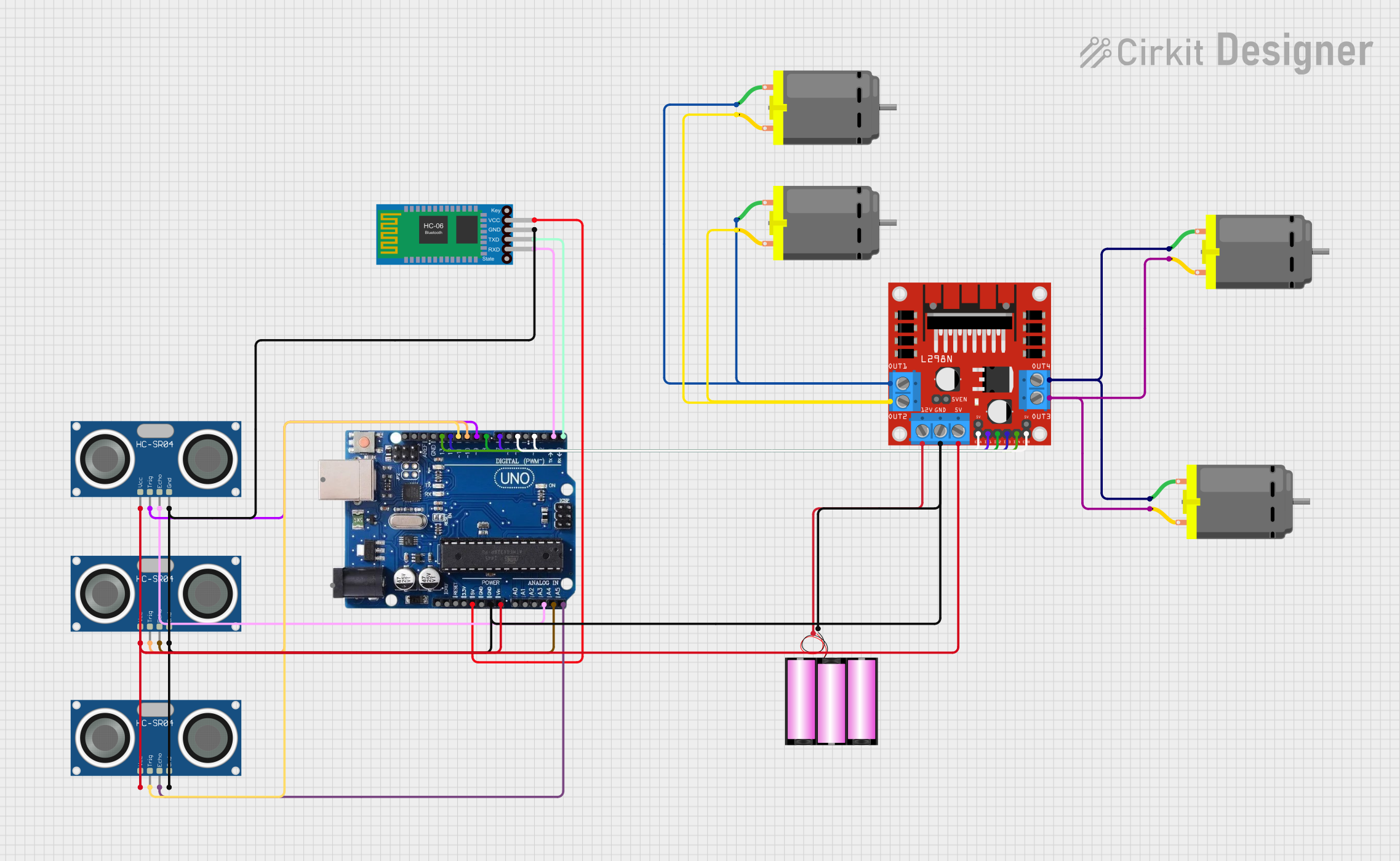
The circuit described in the provided inputs is a complex system that includes an Arduino Uno R3 microcontroller, multiple sensors, a motor driver, DC motors, and a Bluetooth module. The Arduino Uno R3 serves as the central processing unit, interfacing with the HC-SR04 ultrasonic sensors for distance measurement, controlling the DC motors through the L298N motor driver, and communicating with external devices via the Bluetooth HC-06 module. The circuit is powered by a 12V battery, which supplies power to the motor driver, while the Arduino and other components are powered by the Arduino's regulated voltage outputs.
Component List
DC Motor
- Description: An electric motor that converts DC electrical power into mechanical power.
- Pins: pin 1, pin 2
Battery 12V
- Description: A 12-volt power source used to power the circuit.
- Pins: + (positive), - (negative)
HC-SR04 Ultrasonic Sensor
- Description: A sensor that uses ultrasonic waves to measure distance.
- Pins: VCC (power), TRIG (trigger), ECHO (echo), GND (ground)
Arduino Uno R3
- Description: A microcontroller board based on the ATmega328P.
- Pins: USB Port, Power Jack, Not Connected, IOREF, RESET, 3.3V, 5V, GND, VIN, A0-A5, SCL, SDA, AREF, Digital Pins 0-13
L298N DC Motor Driver
- Description: A module that allows control of two DC motors or one stepper motor.
- Pins: OUT1-OUT4, 12V, GND, 5V, ENA, ENB, IN1-IN4, 5V-ENA-JMP-I/O, +5V-J1/J2
Bluetooth HC-06
- Description: A Bluetooth module for wireless communication.
- Pins: VCC (power), GND (ground), TXD (transmit), RXD (receive)
Wiring Details
DC Motor
- pin 1: Connected to L298N motor driver OUT1/OUT4
- pin 2: Connected to L298N motor driver OUT2/OUT3
Battery 12V
- +: Connected to L298N motor driver 12V
- -: Connected to the common ground net
HC-SR04 Ultrasonic Sensor
- VCC: Connected to Arduino Uno R3 VIN
- TRIG: Connected to Arduino Uno R3 digital pins 9, 10, or 11
- ECHO: Connected to Arduino Uno R3 analog pins A3, A4/SDA, or A5/SCL
- GND: Connected to the common ground net
Arduino Uno R3
- 5V: Connected to Bluetooth HC-06 VCC
- GND: Connected to the common ground net
- VIN: Connected to HC-SR04 VCC pins
- A3, A4/SDA, A5/SCL: Connected to HC-SR04 ECHO pins
- Digital Pins 7-13: Connected to L298N motor driver IN1-IN4, ENA, ENB
- Digital Pins 0, 1: Connected to Bluetooth HC-06 TXD, RXD
L298N DC Motor Driver
- OUT1-OUT4: Connected to DC Motor pin 1 and pin 2
- 12V: Connected to Battery 12V +
- GND: Connected to the common ground net
- 5V: Connected to Arduino Uno R3 VIN
- ENA, ENB: Connected to Arduino Uno R3 digital pins 3 and 5
- IN1-IN4: Connected to Arduino Uno R3 digital pins 7-13
Bluetooth HC-06
- VCC: Connected to Arduino Uno R3 5V
- GND: Connected to the common ground net
- TXD: Connected to Arduino Uno R3 digital pin 0
- RXD: Connected to Arduino Uno R3 digital pin 1
Documented Code
No code was provided for the microcontrollers in the circuit. To fully utilize the hardware, embedded code for the Arduino Uno R3 would be required to handle tasks such as reading sensor data, controlling motor speed and direction, and managing Bluetooth communication. The code would typically be written in C/C++ using the Arduino IDE and uploaded to the Arduino Uno R3 via the USB port.