Arduino-Controlled Servo Rain Sensor System
Circuit Documentation
Summary
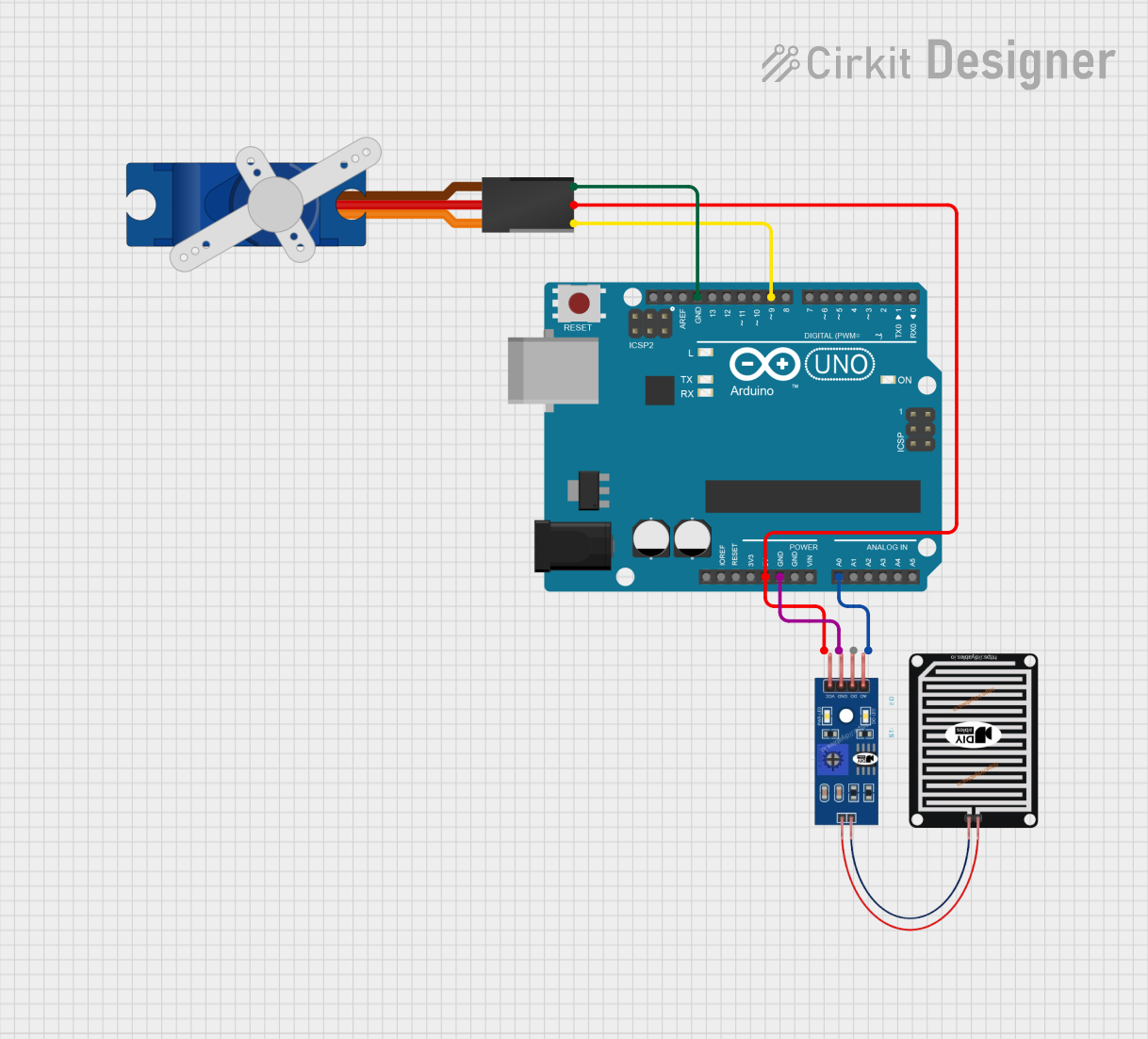
This circuit is designed to interface a rain sensor with an Arduino UNO microcontroller and control a Tower Pro SG90 servo motor based on the sensor input. The rain sensor detects the presence of rain and provides an analog output to the Arduino, which processes the signal and accordingly drives the servo motor. The servo motor can be used to actuate a mechanism, such as moving a cover to protect an object from rain.
Component List
RAIN SENSOR
- Pins: AO (Analog Output), DO (Digital Output), GRD (Ground), VCC (Power Supply)
- Description: A sensor that detects water droplets by measuring the resistance between two pads and provides an analog signal.
- Purpose: To detect rain and provide an analog signal to the Arduino UNO.
Tower Pro SG90 Servo
- Pins: Signal, +5V, GND
- Description: A small and lightweight servo motor capable of precise control.
- Purpose: To actuate a mechanism in response to the rain sensor's signal.
Arduino UNO
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0-A5, SCL, SDA, AREF, D0-D13
- Description: A microcontroller board based on the ATmega328P, with a variety of digital and analog I/O pins.
- Purpose: To process the analog signal from the rain sensor and control the servo motor.
Wiring Details
RAIN SENSOR
- AO (Analog Output): Connected to Arduino UNO's A0 pin.
- GRD (Ground): Connected to Arduino UNO's GND pin.
- VCC (Power Supply): Connected to Arduino UNO's 5V pin.
Tower Pro SG90 Servo
- Signal: Connected to Arduino UNO's D9 pin.
- +5V: Connected to Arduino UNO's 5V pin.
- GND: Connected to Arduino UNO's GND pin.
Arduino UNO
- A0: Receives the analog signal from the rain sensor's AO pin.
- 5V: Provides power to the rain sensor and the servo motor.
- GND: Common ground for the circuit.
- D9: Sends PWM signal to the servo motor's signal pin.
Documented Code
The following code is intended to run on the Arduino UNO microcontroller:
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
The code is currently a template with empty setup() and loop() functions. The setup() function should be used to initialize the pin modes, and the loop() function should contain the main logic for reading the rain sensor's analog output and controlling the servo motor accordingly.
Note: The actual implementation code for reading the sensor and controlling the servo is not provided in the input and should be developed based on the specific requirements of the application.