ESP32-Controlled Robot with L298N Motor Driver and Ultrasonic Sensors
Circuit Documentation
Summary
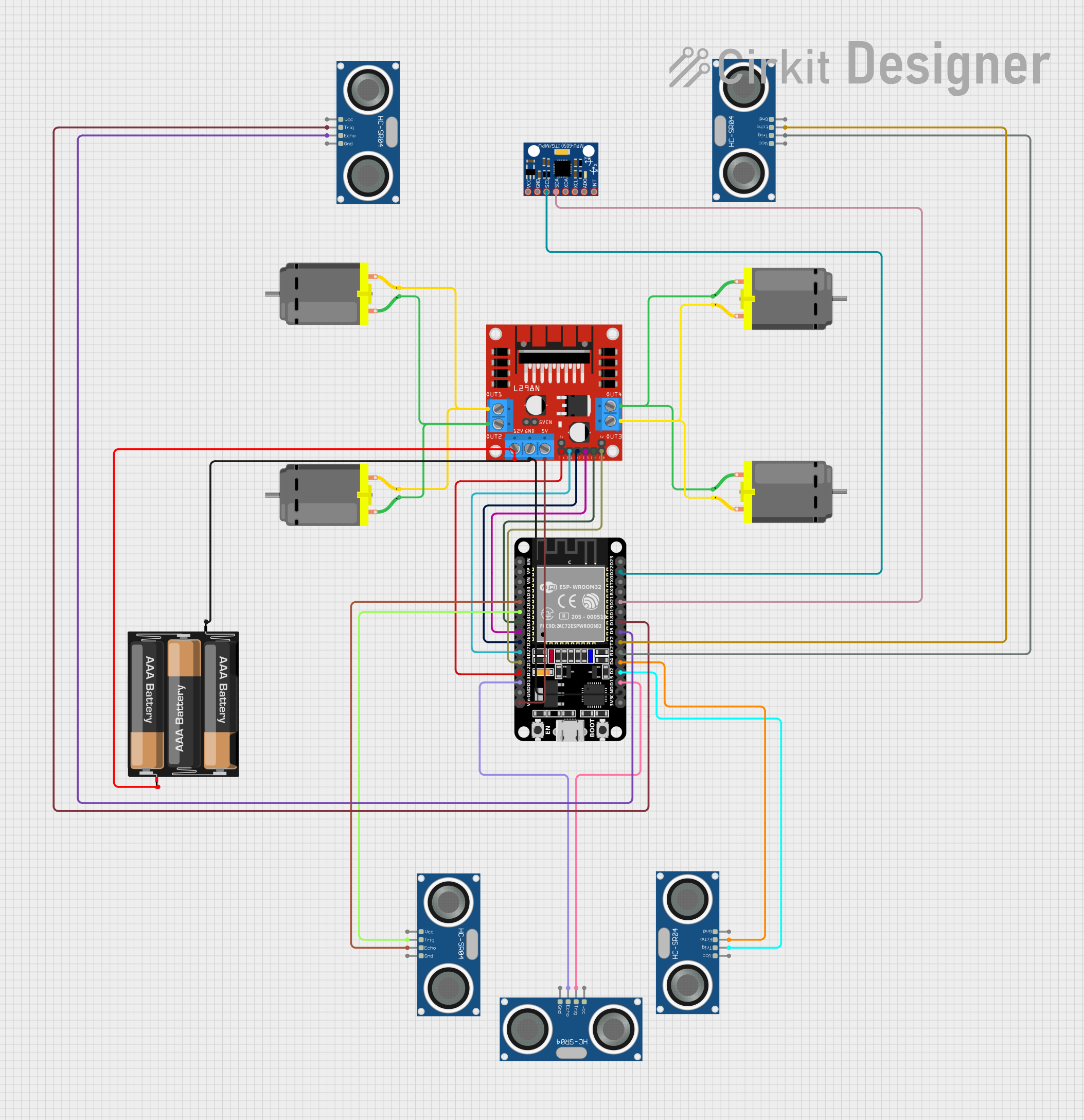
The circuit in question is designed to control multiple DC motors using an L298N motor driver, interfaced with an ESP32 microcontroller. The system also includes multiple HC-SR04 ultrasonic sensors for distance measurement and an MPU-6050 sensor for motion tracking. The power supply for the motor driver is provided by a 3xAA battery pack. The ESP32 microcontroller is responsible for processing sensor data and controlling the speed and direction of the motors.
Component List
DC Motor
- Description: A standard DC motor used for converting electrical energy into mechanical rotation.
- Pins: 2 pins for power connection.
L298N DC Motor Driver
- Description: A motor driver module capable of driving two DC motors. It controls the direction and speed of the motors.
- Pins: Multiple pins for motor outputs, power supply, and control signals from the microcontroller.
MPU-6050
- Description: A motion tracking device that contains a 3-axis gyroscope and a 3-axis accelerometer.
- Pins: Pins for power (VCC, GND), I2C communication (SCL, SDA), and interrupt output (INT).
HC-SR04 Ultrasonic Sensor
- Description: An ultrasonic distance sensor that uses sonar to determine the distance to an object.
- Pins: Pins for power (VCC, GND), trigger input (TRIG), and echo output (ECHO).
3xAA Battery
- Description: A battery pack consisting of three AA batteries to provide power to the circuit.
- Pins: Positive (VCC) and negative (GND) terminals.
ESP32 (30 pin)
- Description: A powerful microcontroller with Wi-Fi and Bluetooth capabilities, used for controlling and processing data from sensors and motor driver.
- Pins: A variety of GPIO pins, power (3V3, GND, Vin), and communication interfaces.
Wiring Details
DC Motor
- Power Connections: Connected to the L298N motor driver's output pins.
L298N DC Motor Driver
- Motor Outputs: Connected to the DC motors.
- Power Supply: 12V and GND connected to the 3xAA battery pack.
- Control Signals: IN1, IN2, IN3, IN4, ENA, and ENB connected to the ESP32 for motor control.
MPU-6050
- Power: VCC to 3.3V, GND to ground.
- I2C Communication: SCL to ESP32's D22, SDA to ESP32's D21.
HC-SR04 Ultrasonic Sensor
- Power: VCC to 5V, GND to ground.
- Trigger/Echo: TRIG and ECHO pins connected to various GPIO pins on the ESP32 for distance measurement.
3xAA Battery
- Power Supply: Provides 12V to the L298N motor driver and ground connection to the common ground.
ESP32 (30 pin)
- GPIO: Various GPIO pins connected to the L298N motor driver and HC-SR04 ultrasonic sensors for control and data acquisition.
- Power: Vin connected to the L298N motor driver's 5V output for power, GND connected to the common ground.
Documented Code
No code has been provided for the microcontroller. The documentation of the code would typically include setup routines, main control loops, function definitions, and comments explaining the logic and functionality of the code. Since no code is available, this section cannot be completed.