Arduino-Controlled Obstacle Avoiding Robot with Ultrasonic Sensor and Dual H-Bridge Motor Control
Circuit Documentation
Summary
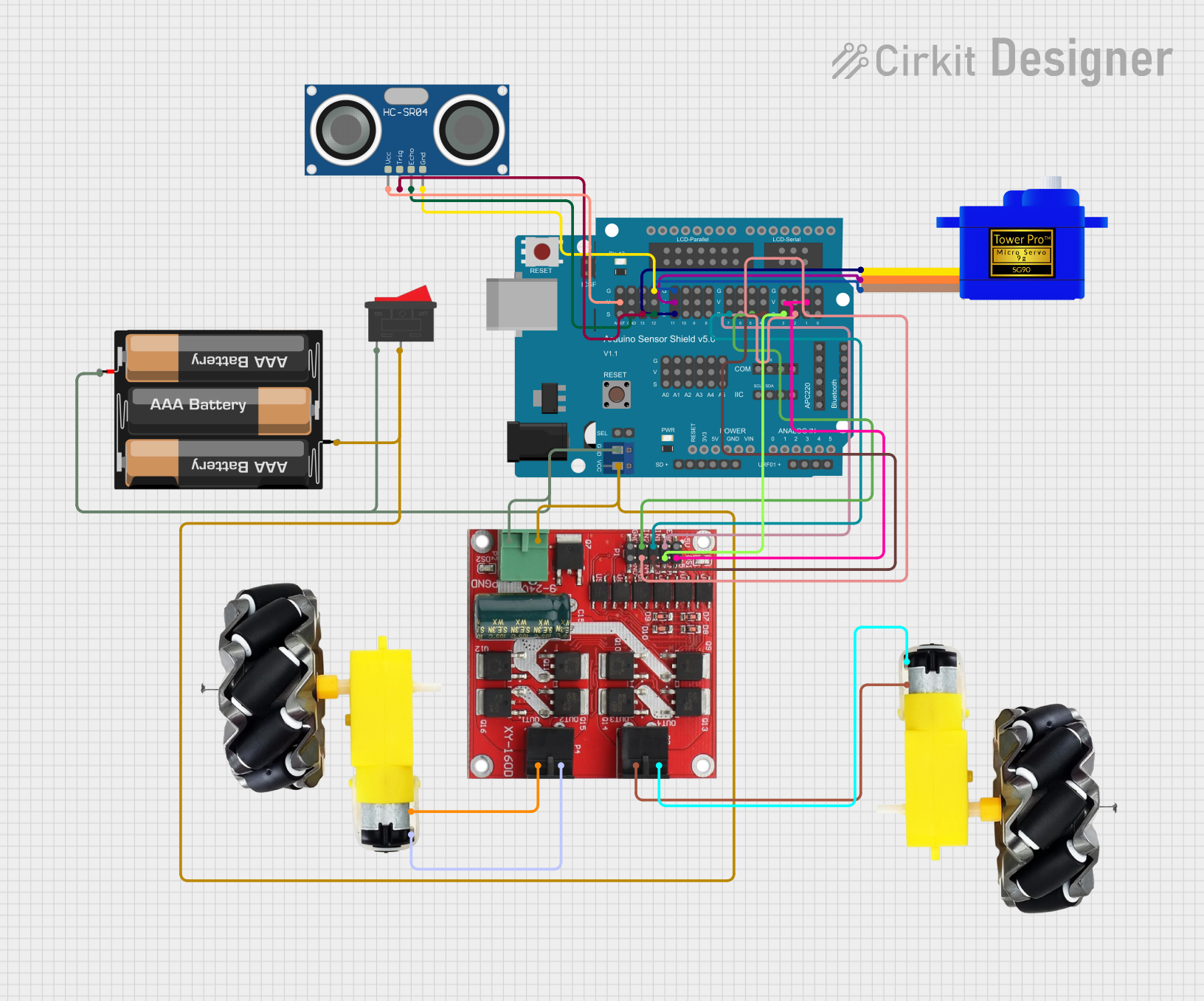
This circuit is designed to control a mobile robot equipped with a servo motor, two sets of motor and wheels, an HC-SR04 ultrasonic sensor, and an L298 Dual H Bridge Motor Speed Controller. The brain of the robot is an Arduino UNO, which is interfaced with an Arduino Sensor Shield v5.0 for easy connection of peripherals. The ultrasonic sensor is mounted on the servo motor for scanning the environment. The L298 controller drives the motors, allowing for speed and direction control. A rocker switch is used to control the power from a 3xAA battery pack to the system.
Component List
- Arduino UNO: A microcontroller board based on the ATmega328P, with a variety of digital and analog I/O pins.
- Servomotor SG90: A small and lightweight servo motor used for precise control of angular motion.
- Motor and Wheels (x2): The actuators for the robot's movement, providing the necessary torque to drive the wheels.
- HC-SR04 Ultrasonic Sensor: A sensor that measures distance by emitting ultrasonic waves and measuring the time taken for the echo to return.
- Arduino Sensor Shield v5.0: An expansion board for Arduino that allows for easy connection of sensors and actuators without the need for soldering.
- L298 Dual H Bridge Motor Speed Controller: A motor driver module that can control the speed and direction of two DC motors.
- Rocker Switch: A simple on/off switch to control the power supply to the circuit.
- 3xAA Battery Pack: The power source for the robot, providing a nominal voltage of 4.5V.
Wiring Details
Arduino UNO
- Connected to the Arduino Sensor Shield v5.0 via all corresponding pins.
Servomotor SG90
- SIG: Connected to pin 11-S on the Arduino Sensor Shield v5.0.
- VCC: Connected to pin 11-V on the Arduino Sensor Shield v5.0.
- GND: Connected to pin 11-G on the Arduino Sensor Shield v5.0.
Motor and Wheels
- vcc: One set connected to Motor 1 Power on the L298 controller, the other set to Motor 2 Power.
- GND: One set connected to Motor 1 GND on the L298 controller, the other set to Motor 2 GND.
HC-SR04 Ultrasonic Sensor
- VCC: Connected to AREF-V on the Arduino Sensor Shield v5.0.
- TRIG: Connected to pin 13-S on the Arduino Sensor Shield v5.0.
- ECHO: Connected to pin 12-S on the Arduino Sensor Shield v5.0.
- GND: Connected to pin 12-G on the Arduino Sensor Shield v5.0.
Arduino Sensor Shield v5.0
- VCC: Connected to 12V on the L298 controller, 2 on the Rocker Switch, and GND on the 3xAA Battery Pack.
- GND: Connected to GND on the L298 controller, 1 on the Rocker Switch, and VCC on the 3xAA Battery Pack.
L298 Dual H Bridge Motor Speed Controller
- 12V: Connected to VCC on the Arduino Sensor Shield v5.0, 2 on the Rocker Switch, and GND on the 3xAA Battery Pack.
- GND: Connected to GND on the Arduino Sensor Shield v5.0, 1 on the Rocker Switch, and VCC on the 3xAA Battery Pack.
- IN1, IN2, IN3, IN4: Connected to pins 7-S, 5-S, 4-S, and 2-S respectively on the Arduino Sensor Shield v5.0.
- ENA: Connected to pins 6-S and 3-S on the Arduino Sensor Shield v5.0.
- 5V: Connected to pin 1-V on the Arduino Sensor Shield v5.0.
Rocker Switch
- 1: Connected to GND on the L298 controller, GND on the Arduino Sensor Shield v5.0, and VCC on the 3xAA Battery Pack.
- 2: Connected to 12V on the L298 controller, VCC on the Arduino Sensor Shield v5.0, and GND on the 3xAA Battery Pack.
3xAA Battery Pack
- VCC: Connected to GND on the L298 controller, GND on the Arduino Sensor Shield v5.0, and 1 on the Rocker Switch.
- GND: Connected to 12V on the L298 controller, VCC on the Arduino Sensor Shield v5.0, and 2 on the Rocker Switch.
Documented Code
#include <Servo.h>
Servo servo;
// Ultrasonic Module pins
const int trigPin = 13;
const int echoPin = 12;
// Servo motor that aims ultrasonic sensor
const int servoPin = 11;
// Motor control pins: L298N H bridge
const int enAPin = 6; // Left motor PWM speed control
const int in1Pin = 7; // Left motor Direction 1
const int in2Pin = 5; // Left motor Direction 2
const int in3Pin = 4; // Right motor Direction 1
const int in4Pin = 2; // Right motor Direction 2
const int enBPin = 3; // Right motor PWM speed control
enum Motor { LEFT, RIGHT };
// Set motor speed: 255 full ahead, -255 full reverse, 0 stop
void go(enum Motor m, int speed) {
digitalWrite(m == LEFT ? in1Pin : in3Pin, speed > 0 ? HIGH : LOW);
digitalWrite(m == LEFT ? in2Pin : in4Pin, speed <= 0 ? HIGH : LOW);
analogWrite(m == LEFT ? enAPin : enBPin, speed < 0 ? -speed : speed);
}
// Initial motor test: left motor forward then back, right motor forward then back
void testMotors() {
static int speed[8] = {128, 255, 128, 0, -128, -255, -128, 0};
go(RIGHT, 0);
for (unsigned char i = 0; i < 8; i++) {
go(LEFT, speed[i]);
delay(200);
}
for (unsigned char i = 0; i < 8; i++) {
go(RIGHT, speed[i]);
delay(200);
}
}
// Read distance from the ultrasonic sensor, return distance in mm
unsigned int readDistance() {
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
unsigned long period = pulseIn(echoPin, HIGH);
return period * 343 / 2000;
}
#define NUM_ANGLES 7
unsigned char sensorAngle[NUM_ANGLES] = {60, 70, 80, 90, 100, 110, 120};
unsigned int distance[NUM_ANGLES];
// Scan the area ahead by sweeping the ultrasonic sensor
void readNextDistance() {
static unsigned char angleIndex = 0;
static signed char step = 1;
distance[angleIndex] = readDistance();
angleIndex += step;
if (angleIndex == NUM_ANGLES - 1) step = -1;
else if (angleIndex == 0) step = 1;
servo.write(sensorAngle[angleIndex]);
}
// Initial configuration
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
digitalWrite(trigPin, LOW);
pinMode(enAPin, OUTPUT);
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(in3Pin, OUTPUT);
pinMode(in4Pin, OUTPUT);
pinMode(enBPin, OUTPUT);
servo.attach(servoPin);
servo.write(90);
go(LEFT, 0);
go(RIGHT, 0);
testMotors();
// Scan the surroundings before starting
servo.write(sensorAngle[0]);
delay(200);
for (unsigned char i = 0; i < NUM_ANGLES; i++) {
readNextDistance();
delay(200);
}
}
// Main loop: check if something is too close
void loop() {
readNextDistance();
unsigned char tooClose = 0;
for (unsigned char i = 0; i < NUM_ANGLES; i++) {
if (distance[i] < 300) {
tooClose = 1;
}
}
if (tooClose) {
// Something's nearby: back up left
go(LEFT, -180);
go(RIGHT, -80);
} else {
// Nothing in our way: go forward
go(LEFT, 255);
go(RIGHT, 255);
}
// Check the next direction in 50 ms
delay(50);
}
Code Description
The provided code is for an Arduino UNO microcontroller. It includes a library for controlling the servo motor and defines pins for interfacing with the ultrasonic sensor and the motor controller. The code contains functions to control the motors, read distances from