Wi-Fi Controlled Ultrasonic Distance Sensor with Servo Motor and Battery Power
Circuit Documentation
Summary
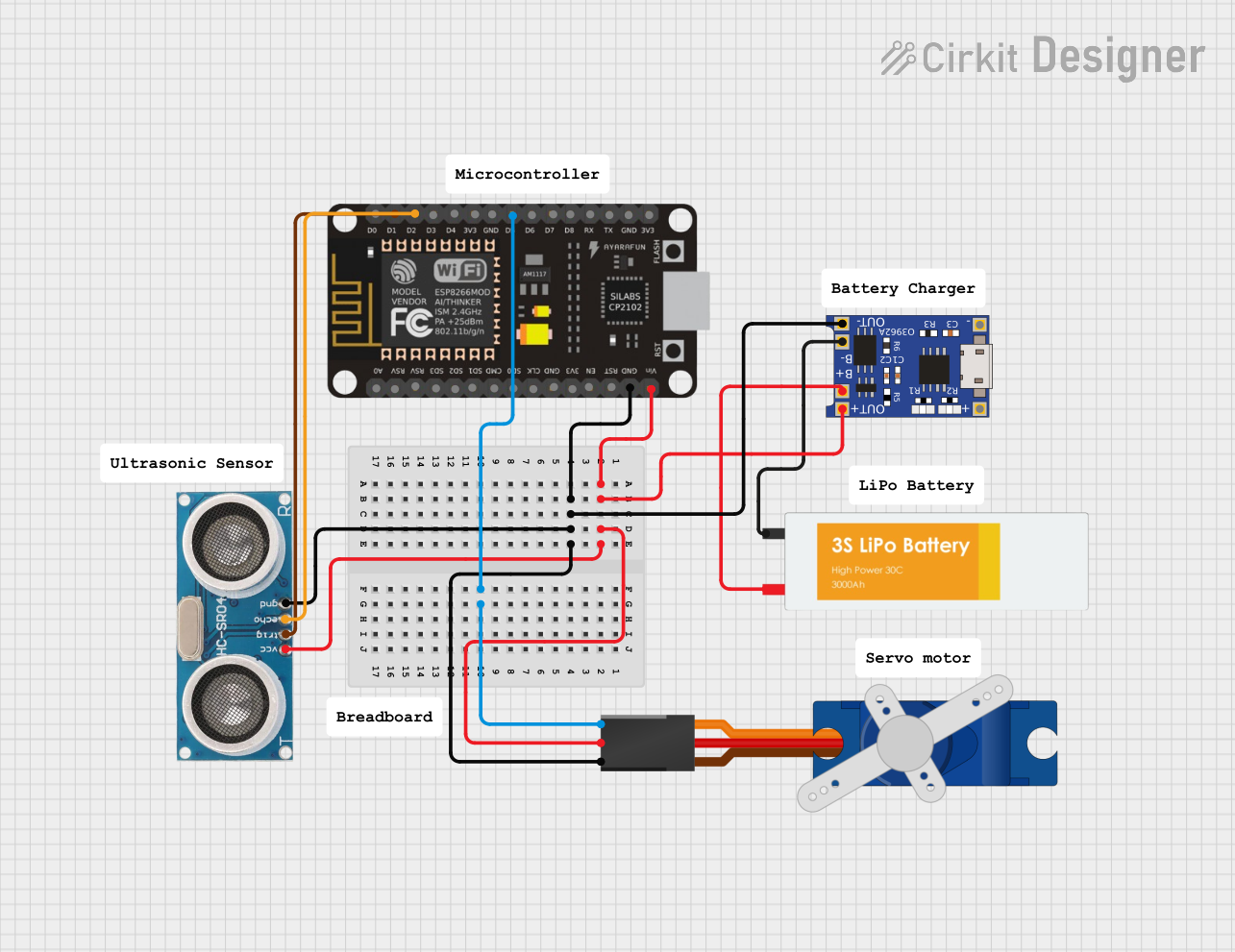
This circuit is designed to measure distances using an ultrasonic sensor and control a servo motor to simulate radar movement. The NodeMCU ESP8266 microcontroller is used for communication and control, connecting to Wi-Fi to potentially transmit data. The circuit is powered by a LiPo battery, which is managed by a TP4056 charging module.
Component List
TP4056
- Description: Lithium battery charger module.
- Pins: OUT-, B-, B+, OUT+, IN-, IN+
Ultrasonic Sensor
- Description: HC-SR04 ultrasonic distance sensor.
- Pins: +VCC, Trigger, Echo, GND
Lipo Battery
- Description: Rechargeable lithium polymer battery.
- Pins: VCC, GND
ESP8266 NodeMCU
- Description: Wi-Fi enabled microcontroller.
- Pins: D0, D1, D2, D3, D4, 3V3, GND, D5, D6, D7, D8, RX, TX, A0, RSV, SD3, SD2, SD1, CMD, SD0, CLK, EN, RST, VIN
Tower Pro SG90 Servo
- Description: Small servo motor for precise control.
- Pins: Signal, +5V, GND
Wiring Details
TP4056
- OUT+: Connected to VIN of ESP8266 NodeMCU, +VCC of Ultrasonic Sensor, and +5V of Tower Pro SG90 Servo.
- OUT-: Connected to GND of ESP8266 NodeMCU, GND of Ultrasonic Sensor, and GND of Tower Pro SG90 Servo.
- B+: Connected to VCC of Lipo Battery.
- B-: Connected to GND of Lipo Battery.
Ultrasonic Sensor
- +VCC: Connected to OUT+ of TP4056.
- GND: Connected to OUT- of TP4056.
- Trigger: Connected to D1 of ESP8266 NodeMCU.
- Echo: Connected to D2 of ESP8266 NodeMCU.
Lipo Battery
- VCC: Connected to B+ of TP4056.
- GND: Connected to B- of TP4056.
ESP8266 NodeMCU
- VIN: Connected to OUT+ of TP4056.
- GND: Connected to OUT- of TP4056.
- D1: Connected to Trigger of Ultrasonic Sensor.
- D2: Connected to Echo of Ultrasonic Sensor.
- D5: Connected to Signal of Tower Pro SG90 Servo.
Tower Pro SG90 Servo
- +5V: Connected to OUT+ of TP4056.
- GND: Connected to OUT- of TP4056.
- Signal: Connected to D5 of ESP8266 NodeMCU.
Code Documentation
/*
* NodeMCU ESP8266 for communication and control.
* Connects to Wi-Fi, uses an ultrasonic sensor (HC-SR04) to measure distances,
* and a servo motor to sweep and simulate radar movement.
* The servo motor sweeps from 0° to 180° in 10° increments and pauses briefly
* to capture distance data.
*/
#include <ESP8266WiFi.h>
#include <Servo.h>
#define TRIG_PIN D1
#define ECHO_PIN D2
#define SERVO_PIN D5
const char* ssid = "your_SSID";
const char* password = "your_PASSWORD";
Servo myservo;
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
// Wi-Fi connection timeout
unsigned long startAttemptTime = millis();
while (WiFi.status() != WL_CONNECTED && millis() - startAttemptTime < 30000) { // 30 seconds timeout
delay(1000);
Serial.println("Connecting to WiFi...");
}
if (WiFi.status() != WL_CONNECTED) {
Serial.println("Failed to connect to WiFi");
// Handle the error, e.g., retry or enter a low-power mode
} else {
Serial.println("Connected to WiFi");
}
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
myservo.attach(SERVO_PIN);
}
long measureDistance() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
long duration = pulseIn(ECHO_PIN, HIGH);
long distance = duration * 0.034 / 2;
return distance;
}
void loop() {
for (int pos = 0; pos <= 180; pos += 10) {
myservo.write(pos);
delay(500);
long distance = measureDistance();
Serial.print("Angle: ");
Serial.print(pos);
Serial.print(" Distance: ");
Serial.print(distance);
Serial.println(" cm");
}
for (int pos = 180; pos >= 0; pos -= 10) {
myservo.write(pos);
delay(500);
long distance = measureDistance();
Serial.print("Angle: ");
Serial.print(pos);
Serial.print(" Distance: ");
Serial.print(distance);
Serial.println(" cm");
}
}
This code initializes the NodeMCU ESP8266, connects it to Wi-Fi, and sets up the ultrasonic sensor and servo motor. The measureDistance function triggers the ultrasonic sensor and calculates the distance based on the echo time. The loop function sweeps the servo motor from 0° to 180° and back, measuring and printing the distance at each step.