Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO-Based Motion Sensor with OLED Display
Circuit Documentation
Summary
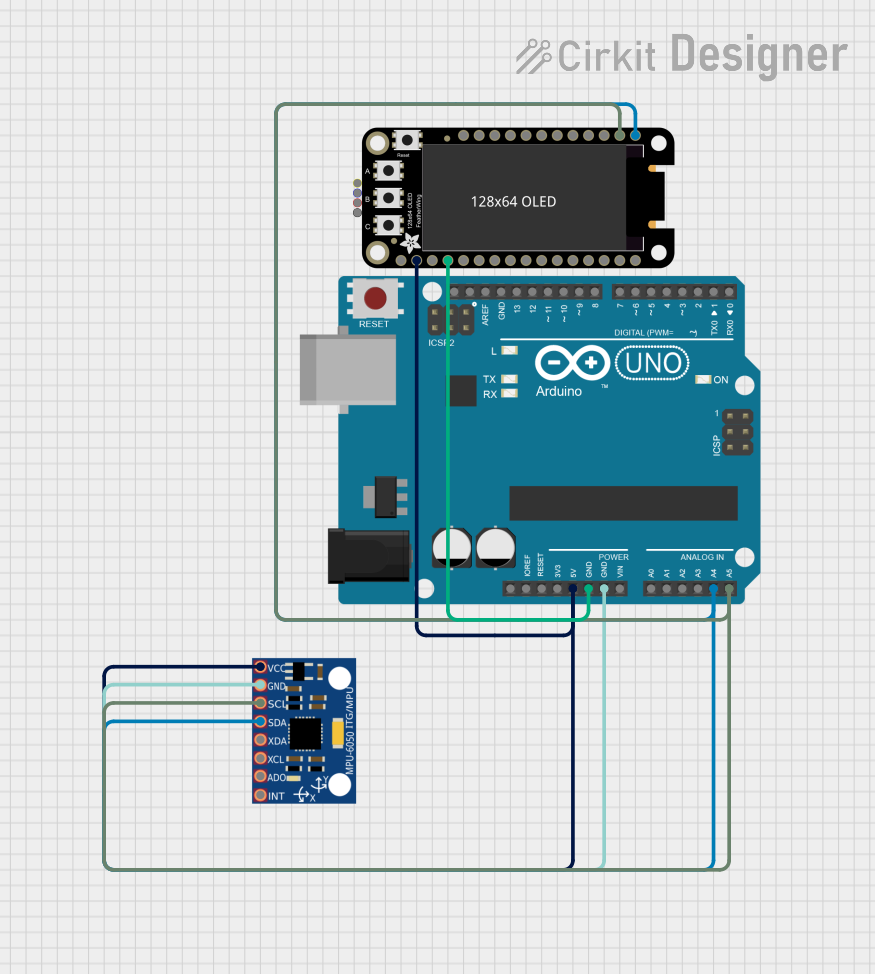
This circuit integrates an Arduino UNO microcontroller with an MPU-6050 accelerometer and gyroscope sensor and an Adafruit 128x64 OLED FeatherWing display. The Arduino UNO reads data from the MPU-6050 sensor and displays the accelerometer and gyroscope data on the OLED display.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
Adafruit 128x64 OLED FeatherWing
- Description: A 128x64 pixel OLED display.
- Pins: GND, 3.3V, SDA, SCL, !RESET, 3, 5, 28, 6, 27, 7, 26, 8, 25, 9, 24, 10, 23, 11, 22, 12, J, 13, I, 14, H, 15, 16
MPU-6050
- Description: A 3-axis accelerometer and 3-axis gyroscope sensor.
- Pins: VCC, GND, SCL, SDA, XDA, XCL, AD0, INT
Wiring Details
Arduino UNO
- 5V: Connected to VCC of MPU-6050 and 3.3V of Adafruit 128x64 OLED FeatherWing
- GND: Connected to GND of MPU-6050 and GND of Adafruit 128x64 OLED FeatherWing
- A4: Connected to SDA of MPU-6050 and SDA of Adafruit 128x64 OLED FeatherWing
- A5: Connected to SCL of MPU-6050 and SCL of Adafruit 128x64 OLED FeatherWing
Adafruit 128x64 OLED FeatherWing
- 3.3V: Connected to 5V of Arduino UNO
- GND: Connected to GND of Arduino UNO
- SDA: Connected to A4 of Arduino UNO and SDA of MPU-6050
- SCL: Connected to A5 of Arduino UNO and SCL of MPU-6050
MPU-6050
- VCC: Connected to 5V of Arduino UNO
- GND: Connected to GND of Arduino UNO
- SDA: Connected to A4 of Arduino UNO and SDA of Adafruit 128x64 OLED FeatherWing
- SCL: Connected to A5 of Arduino UNO and SCL of Adafruit 128x64 OLED FeatherWing
Code Documentation
Arduino UNO Code
#include <Wire.h>
#include <MPU6050.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
// Create MPU6050 object
MPU6050 mpu;
void setup() {
Serial.begin(115200);
// Initialize MPU6050
Wire.begin();
mpu.initialize();
if (!mpu.testConnection()) {
Serial.println("MPU6050 connection failed");
while (1);
}
// Initialize OLED display
if(!display.begin(SSD1306_I2C_ADDRESS, 0x3D)) {
Serial.println(F("SSD1306 allocation failed"));
for(;;);
}
display.display();
delay(2000);
display.clearDisplay();
}
void loop() {
// Read raw accelerometer and gyroscope data
Vector accel = mpu.getAcceleration();
Vector gyro = mpu.getRotation();
float ax = accel.x;
float ay = accel.y;
float az = accel.z;
float gx = gyro.x;
float gy = gyro.y;
float gz = gyro.z;
// Clear display
display.clearDisplay();
// Print data on OLED
display.setCursor(0,0);
display.print("Accel X: ");
display.println(ax);
display.print("Accel Y: ");
display.println(ay);
display.print("Accel Z: ");
display.println(az);
display.print("Gyro X: ");
display.println(gx);
display.print("Gyro Y: ");
display.println(gy);
display.print("Gyro Z: ");
display.println(gz);
display.display();
delay(500); // Update every 500ms
}
This code initializes the MPU-6050 sensor and the OLED display. It reads the accelerometer and gyroscope data from the MPU-6050 and displays it on the OLED screen, updating every 500 milliseconds.