Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO Based Ultrasonic Distance Measurement System
Circuit Documentation
Summary of the Circuit
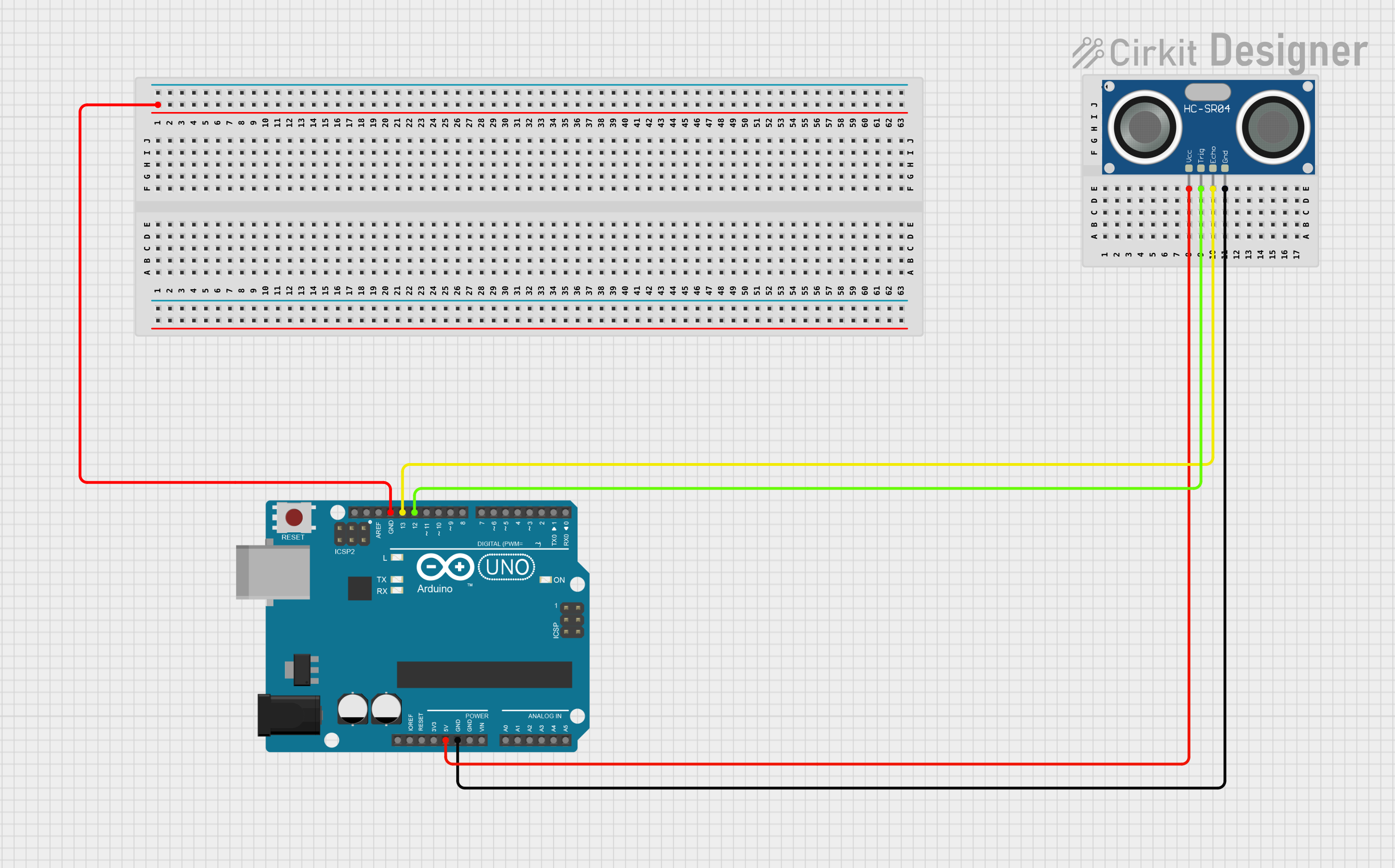
This circuit consists of an Arduino UNO microcontroller board interfaced with an HC-SR04 Ultrasonic Sensor. The Arduino UNO is responsible for controlling the sensor and processing the distance measurements. The HC-SR04 sensor is used to measure distances by emitting ultrasonic waves and measuring the time it takes for the echo to return.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Purpose: Acts as the central processing unit for the circuit, controlling the HC-SR04 sensor and processing its data.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0-A5, SCL, SDA, AREF, D0-D13.
HC-SR04 Ultrasonic Sensor
- Description: An ultrasonic distance sensor capable of measuring distances from 2cm to 400cm.
- Purpose: To measure the distance to an object by emitting ultrasonic pulses and detecting the reflected signal.
- Pins: VCC, TRIG, ECHO, GND.
Wiring Details
Arduino UNO
- 5V connected to HC-SR04 VCC.
- GND connected to HC-SR04 GND.
- D13 connected to HC-SR04 ECHO.
- D12 connected to HC-SR04 TRIG.
HC-SR04 Ultrasonic Sensor
- VCC connected to Arduino UNO 5V.
- GND connected to Arduino UNO GND.
- ECHO connected to Arduino UNO D13.
- TRIG connected to Arduino UNO D12.
Documented Code
Arduino UNO Code (sketch.ino)
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
Additional Notes
- The provided code is a template and does not contain any functionality. It needs to be populated with the setup and loop functions to initialize the sensor and read the distance measurements.
- The
setup()function should initialize the sensor's TRIG and ECHO pins. - The
loop()function should handle the timing of the ultrasonic pulses and calculate the distance from the duration of the received echo. - The code should include error handling to manage cases where no echo is received within a certain time frame, indicating that the distance is out of range or that there is an issue with the sensor.