Arduino-Controlled Ultrasonic Sensor Relay for Automated Lighting
Circuit Documentation
Summary
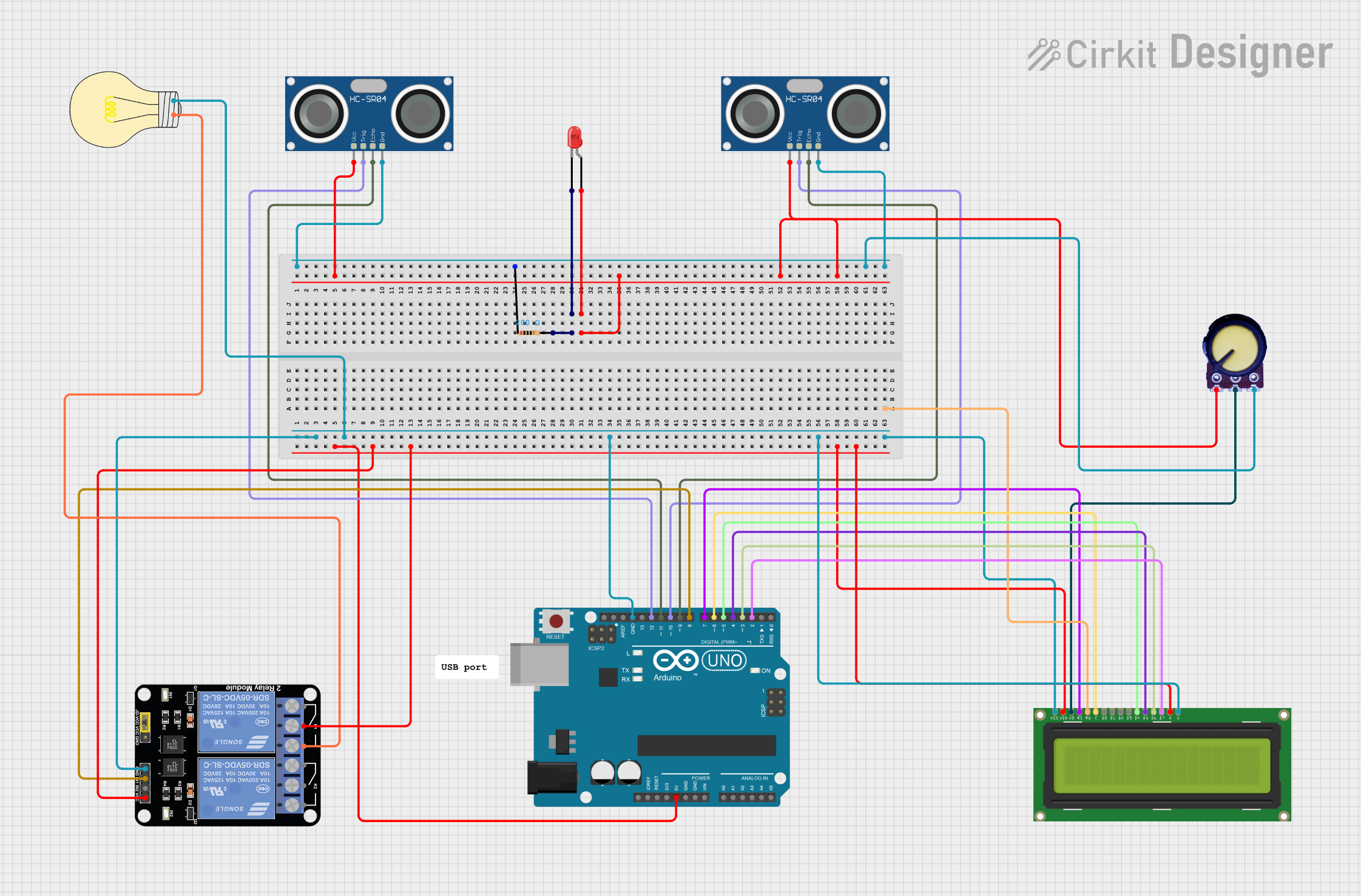
This circuit is designed to utilize an Arduino UNO microcontroller to control a relay module based on the distance measured by two HC-SR04 Ultrasonic Sensors. The relay module then switches a bulb on or off. A potentiometer is used to adjust the contrast of an LCD Display 16x2, which is likely used to display information. A resistor is connected in series with an LED to limit the current through the LED.
Component List
Bulb
- Description: A simple light bulb.
- Pins: positive, negative
HC-SR04 Ultrasonic Sensor
- Description: An ultrasonic sensor for measuring distance.
- Pins: VCC, TRIG, ECHO, GND
Potentiometer
- Description: A variable resistor typically used for adjusting levels such as volume or, in this case, contrast for an LCD.
- Pins: GND, Output, VCC
Relay Module 2 Channel
- Description: A module with two relays that can control the high power circuit with a low power signal.
- Pins: GND, IN1, IN2, VCC, NC1, COM, NO1, NC2, NO2
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0-A5, SCL, SDA, AREF, D0-D13
LED: Two Pin (red)
- Description: A basic red LED.
- Pins: cathode, anode
Resistor
- Description: A passive two-terminal electrical component that implements electrical resistance as a circuit element.
- Properties: 200 Ohms
LCD Display 16x2
- Description: A liquid crystal display capable of displaying 16 characters per line across 2 lines.
- Pins: LEDK, LEDA, DB0-DB7, E, RW, RS, VO, VDD, VSS
Wiring Details
Bulb
- positive: Connected to Relay Module 2 Channel NO1
- negative: Connected to Relay Module 2 Channel GND, Arduino UNO GND, LCD Display 16x2 LEDK and VSS
HC-SR04 Ultrasonic Sensor
- VCC: Connected to LED: Two Pin (red) anode, Potentiometer GND
- TRIG: Connected to Arduino UNO D12 (for one sensor) and D10 (for the other sensor)
- ECHO: Connected to Arduino UNO D11 (for one sensor) and D9 (for the other sensor)
- GND: Connected to Resistor pin1, Potentiometer VCC
Potentiometer
- GND: Connected to HC-SR04 Ultrasonic Sensor VCC
- Output: Connected to LCD Display 16x2 VO
- VCC: Connected to HC-SR04 Ultrasonic Sensor GND
Relay Module 2 Channel
- GND: Connected to Bulb negative, Arduino UNO GND, LCD Display 16x2 LEDK and VSS
- IN1: Connected to Arduino UNO D8
- VCC: Connected to Arduino UNO 5V, LCD Display 16x2 VDD and LEDA
- NO1: Connected to Bulb positive
Arduino UNO
- GND: Connected to Relay Module 2 Channel GND, Bulb negative, LCD Display 16x2 LEDK and VSS
- 5V: Connected to Relay Module 2 Channel VCC, LCD Display 16x2 VDD and LEDA
- D12: Connected to HC-SR04 Ultrasonic Sensor TRIG (for one sensor)
- D11: Connected to HC-SR04 Ultrasonic Sensor ECHO (for one sensor)
- D10: Connected to HC-SR04 Ultrasonic Sensor TRIG (for the other sensor)
- D9: Connected to HC-SR04 Ultrasonic Sensor ECHO (for the other sensor)
- D8: Connected to Relay Module 2 Channel IN1
- D7-D2: Connected to LCD Display 16x2 RS, E, DB4-DB7 respectively
LED: Two Pin (red)
- cathode: Connected to Resistor pin2
- anode: Connected to HC-SR04 Ultrasonic Sensor VCC
Resistor
- pin1: Connected to HC-SR04 Ultrasonic Sensor GND
- pin2: Connected to LED: Two Pin (red) cathode
LCD Display 16x2
- LEDK: Connected to Relay Module 2 Channel GND, Bulb negative, Arduino UNO GND
- LEDA: Connected to Relay Module 2 Channel VCC, Arduino UNO 5V
- DB7-DB4: Connected to Arduino UNO D2-D5 respectively
- E: Connected to Arduino UNO D6
- RW: Not connected
- RS: Connected to Arduino UNO D7
- VO: Connected to Potentiometer Output
- VDD: Connected to Relay Module 2 Channel VCC, Arduino UNO 5V
- VSS: Connected to Relay Module 2 Channel GND, Bulb negative, Arduino UNO GND
Documented Code
#define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 11 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
#define RELAY_LINE1_PIN 8
#include "NewPing.h"
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
unsigned int critical_distance_cms = 50; // Cutoff distance at which the light will switch
bool state = 0;
void setup() {
Serial.begin(9600); // Open serial monitor at 115200 baud to see ping results.
pinMode(RELAY_LINE1_PIN, OUTPUT);
digitalWrite(RELAY_LINE1_PIN, HIGH); // Turn the light off
}
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec).
unsigned int distance = readDistance(); // Current distance of any object facing the ultrasonic sensor
Serial.print("Ultrasonic: ");
Serial.print(distance); // Send ping, get distance in cm and print result (0 = outside set distance range)
Serial.println("cm");
// Someone is near the door
if (distance < critical_distance_cms)
{
while (distance < critical_distance_cms)
{
// Check if they moved away
distance = readDistance();
delay(5); // Do nothing until the person moves away from the door
}
state = !state; // Change the state of the relay
if (state)
{
Serial.println("Door Open!");
digitalWrite(RELAY_LINE1_PIN, LOW); // Turn the light on
}
else
{
Serial.println("Door Closed!");
digitalWrite(RELAY_LINE1_PIN, HIGH); // Turn the light off
}
}
}
// Updates the value of the Ultrasonic reading
unsigned int readDistance()
{
// Read 7 values from the ultrasonic and get the median value (median filter)
// Gets rid of noisy reading
unsigned int distance = sonar.convert_cm(sonar.ping_median(7));
// The value 0 indicates that the ultrasonic sensor is reading nothing in front of it
// Set this distance to max distance so the light doesn't switch unnecessarily
if (distance == 0)
{
distance = MAX_DISTANCE;
}
return distance;
}
This code is designed to read the distance from the HC-SR04 Ultrasonic Sensor and toggle the state of a relay when an object is detected within a critical distance. The relay then controls the power to a bulb. The LCD display is likely used to show status or distance information, but the code for the display is not included in the provided code snippet.