Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
ESP32-Controlled Stepper and Servo Motor System with A4988 Driver and Micro Switch Feedback
Circuit Documentation
Summary
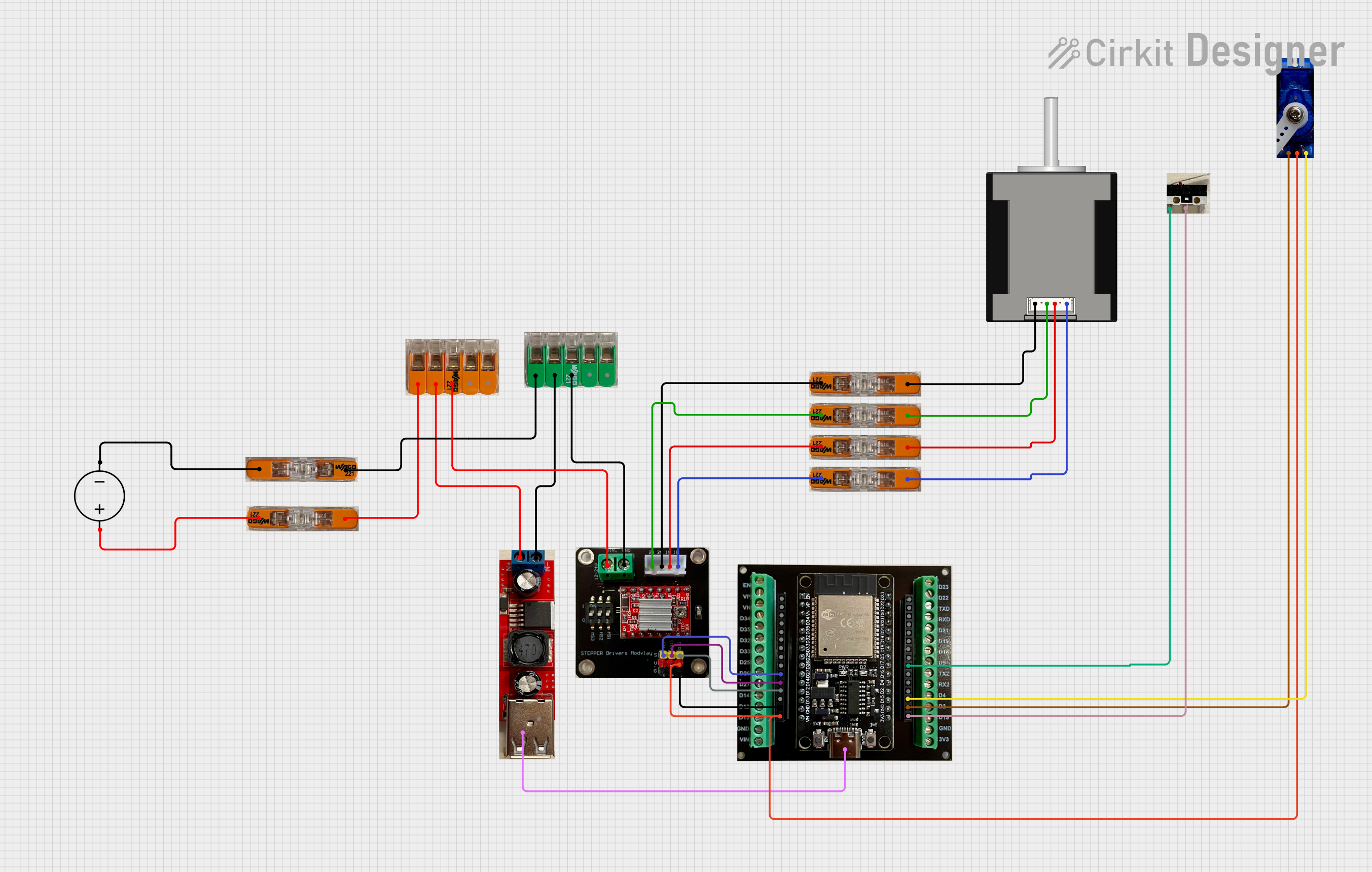
This circuit is designed to control a stepper motor using an A4988 stepper motor driver and an ESP32 microcontroller. Additionally, the circuit includes a servo motor, a micro switch, and a step-down converter USB for power regulation. The power source for the circuit is a DC power supply. WAGO connectors are used throughout the circuit for reliable and easy connections.
Component List
A4988 on Breakout Board
- Stepper motor driver that allows control of one bipolar stepper motor.
- Pins: VIN (12-24V), GND, 2B, 2A, 1A, 1B, ENABLE, STEP, DIR, VDD (5V).
WAGO Connectors
- Terminal block connectors used for making secure and easy wire connections.
- Pins: AWG 18-14.
Nema 17 42-STH48
- A bipolar stepper motor commonly used for precision control in CNC machines and 3D printers.
- Pins: A2 (black), A1 (green), B2 (red), B1 (blue).
ESP32 (30 PIN) on Breakout Board
- A powerful microcontroller with Wi-Fi and Bluetooth capabilities.
- Pins: 3V3, GND, D15, D2, D4, D16, D17, D5, D18, D19, D21, RX0, TX0, D22, D23, EN, VP, VN, D34, D35, D32, D33, D25, D26, D27, D14, D12, D13, VIN, USB-C.
Step Down Converter USB (12-24V)
- A power converter that steps down voltage to a USB output.
- Pins: IN+ (6-40V), IN- (6-40V), USB (2/2), USB (1/2).
Servo Motor
- A rotary actuator that allows for precise control of angular position.
- Pins: GND, VDD (5V).
Micro Switch
- An electric switch that is actuated by very little physical force.
- Pins: NC, C, NO.
DC Power Source
- Provides the electrical power to the circuit.
- Pins: Ground, Positive.
Wiring Details
A4988 on Breakout Board
- VIN (12-24V) connected to WAGO Connector 5-conductor.
- GND connected to WAGO Connector Green 5-conductor.
- 2B connected to WAGO Connector.
- 2A connected to WAGO Connector.
- 1A connected to WAGO Connector.
- 1B connected to WAGO Connector.
- ENABLE connected to ESP32 (D27).
- STEP connected to ESP32 (D14).
- DIR connected to ESP32 (D12).
- VDD (5V) connected to ESP32 (VIN) and Servo Motor (VDD).
WAGO Connectors
- Various connections to A4988, ESP32, Nema 17, DC Power Source, and Step Down Converter.
Nema 17 42-STH48
- A2 (black) connected to WAGO Connector.
- A1 (green) connected to WAGO Connector.
- B2 (red) connected to WAGO Connector.
- B1 (blue) connected to WAGO Connector.
ESP32 (30 PIN) on Breakout Board
- 3V3 connected to Micro Switch (C).
- GND connected to A4988 (GND) and Servo Motor (GND).
- D15 connected to Servo Motor.
- D17 connected to Micro Switch (NC).
- D27 connected to A4988 (ENABLE).
- D14 connected to A4988 (STEP).
- D12 connected to A4988 (DIR).
- VIN connected to Servo Motor (VDD) and A4988 (VDD).
- USB-C connected to Step Down Converter USB.
Step Down Converter USB (12-24V)
- IN+ (6-40V) connected to WAGO Connector 5-conductor.
- IN- (6-40V) connected to WAGO Connector Green 5-conductor.
Servo Motor
- VDD (5V) connected to ESP32 (VIN).
- GND connected to ESP32 (GND).
Micro Switch
- NC connected to ESP32 (D17).
- C connected to ESP32 (3V3).
DC Power Source
- Positive connected to WAGO Connector.
- Ground connected to WAGO Connector.
Documented Code
# stepper_motor.yaml
esphome:
name: stepper-motor
friendly_name: stepper_motor
esp32:
board: esp32dev
framework:
type: arduino
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "xyz"
ota:
- platform: esphome
password: "xyz"
wifi:
ssid: xyz
password: xyz
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Stepper-Motor Fallback Hotspot"
password: "xyz"
captive_portal:
# Controlling the stepper motor for door opening and closing
stepper:
- platform: a4988
id: my_stepper
dir_pin: GPIO12 # "D12" on ESP32
step_pin: GPIO14 # "D14" on ESP32
max_speed: 250 steps/s # 1-250 steps/s
# sleep_pin: GPIO13
acceleration: 100 # 1 bis inf
deceleration: 50 # 1 bis inf
# Controlling the servo motor for window/door shutter
servo:
- id: servo1
output: output1
output:
- platform: ledc # For ESP8266 use: esp8266_pwm
id: output1
pin: GPIO15
frequency: 50 Hz # MUST BE 50Hz
# For Dashboard
number:
- platform: template
name: Stepper Control
min_value: -150 #-100
max_value: 150 #100
step: 1
set_action:
then:
- stepper.set_target:
id: my_stepper
target: !lambda 'return x;' # target: !lambda 'return x*10;'
- platform: template
name: Servo Control
icon: mdi:sync
optimistic: true
min_value: -100
max_value: 100
initial_value: 0
step: 5
on_value:
then:
- lambda: !lambda |-
// Servo Write range is: -1.0 to 1.0, so divide by 100
id(servo1).write(x / 100.0);
# One PIN is used to turn on (enable) the stepper motor driver
switch:
- platform: gpio
pin: GPIO27
inverted: true
id: switch_motor_door
name: "Stepper Motor Enabler"
# Input for micro switch as a sensor for a completely open door
binary_sensor:
- platform: gpio
pin:
number: GPIO17
mode: INPUT_PULLDOWN
name: "Door completely open"
id: door_completely_open
This code is designed to run on an ESP32 microcontroller and is written using the ESPHome framework. It includes configurations for controlling a stepper motor and a servo motor, connecting to Wi-Fi, and setting up a fallback hotspot. It also includes a binary sensor for a micro switch and a switch to enable the stepper motor driver.