Arduino-Controlled Robotic Vehicle with Flame Detection and Bluetooth Connectivity
Circuit Documentation
Summary
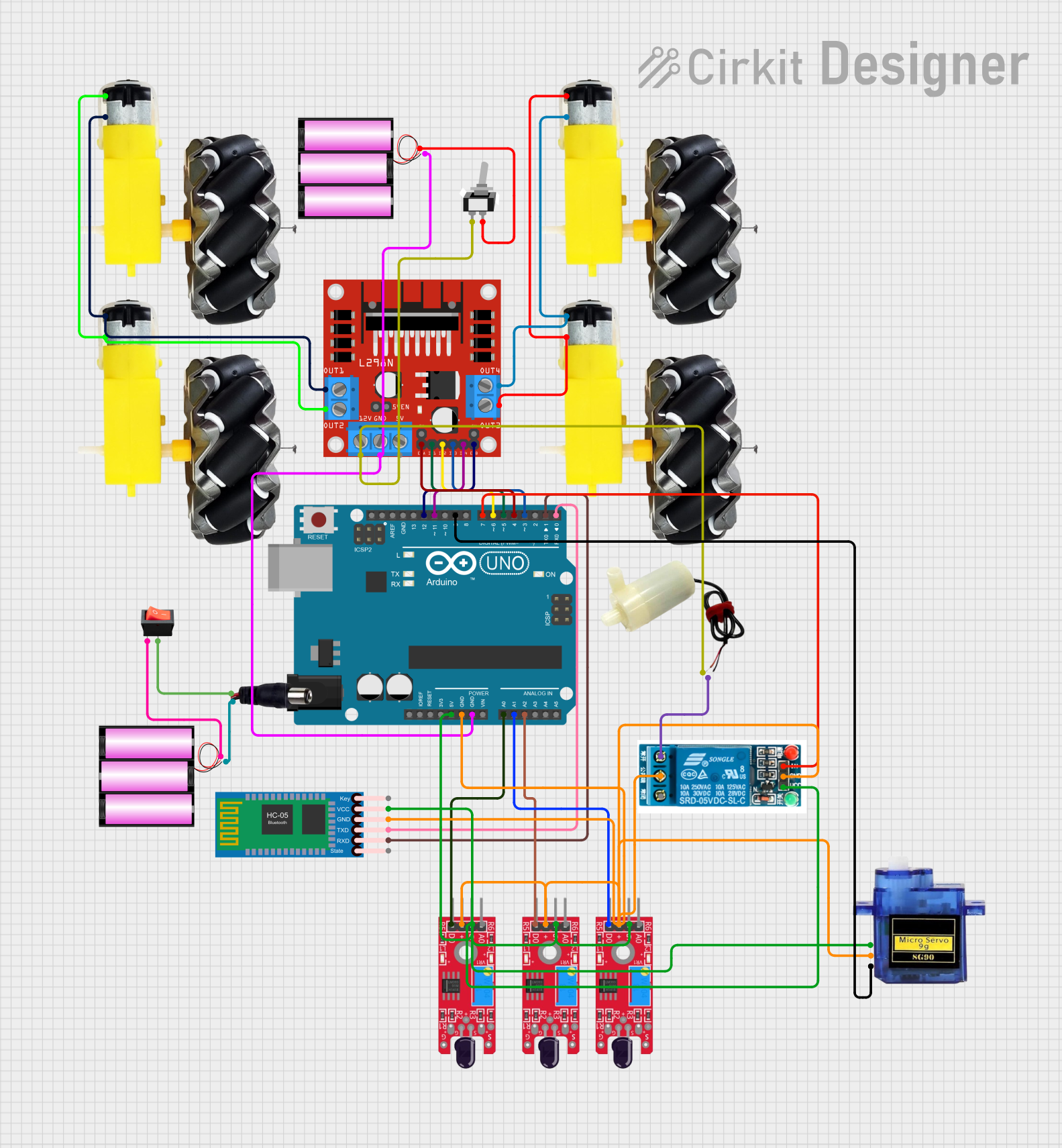
This circuit is designed to control a set of motors and wheels, a mini water pump, and read from flame sensors using an Arduino UNO as the central microcontroller. It includes a Bluetooth module for wireless communication, a motor driver to control the motors, and a servo motor for additional actuation. The circuit is powered by 12V batteries and includes toggle and rocker switches for power control. Flame sensors are used for detecting fire or flame presence, and a relay is used to control the water pump. The circuit is designed for applications such as a fire-fighting robot or an automated watering system.
Component List
Arduino UNO
- Microcontroller board based on the ATmega328P
- Provides digital and analog I/O pins for interfacing with other components
L298N DC Motor Driver
- Module for controlling up to two DC motors with direction and speed control
Motors and Wheels (4x)
- DC motors connected to wheels for mobility
Batteries 12V (2x)
- Provide power to the motor driver and the motors
Toggle Switch SPST
- Single Pole Single Throw switch for power control
5V Mini Water Pump
- A small pump for moving water, controlled by the relay
Power Jack
- Connector for external power supply
Rocker Switch
- Switch for turning the circuit on and off
HC-05 Bluetooth Module
- Wireless communication module for Bluetooth connectivity
KY-026 Flame Sensors (3x)
- Sensors for detecting flames or fire
5V Relay
- Electromechanical switch used to control the water pump
Micro Servo 9G
- Small servo motor for precise control of mechanical movement
Wiring Details
Arduino UNO
5VandGNDpins are used to power the Bluetooth module, flame sensors, servo, and relayA0,A1,A2pins are connected to the digital outputs of the flame sensorsD12,D11,D9,D7,D6,D5,D4,D3pins are used to control the motor driver, servo, and relayD1,D0pins are connected to the TX and RX pins of the Bluetooth module
L298N DC Motor Driver
GNDconnected to the Arduino GND and battery negative12Vconnected to the toggle switch and then to the battery positiveENA,IN1,IN2,IN3,IN4,ENBconnected to Arduino digital pins for motor controlOUT1,OUT2,OUT3,OUT4connected to the motors
Motors and Wheels
- Each motor has
vccandGNDconnected to the corresponding outputs of the motor driver
Toggle Switch SPST
- Connected between the 12V battery and the motor driver 12V input
5V Mini Water Pump
Positive pinconnected to the relay Normally Open contactNegative pinconnected to the battery negative
Power Jack
POSITIFconnected to the rocker switch outputNEGATIFconnected to the battery negative
Rocker Switch
Inputconnected to the second 12V battery positiveOutputconnected to the power jack positive
HC-05 Bluetooth Module
VCCconnected to Arduino 5VGNDconnected to Arduino GNDTXDconnected to Arduino D0RXDconnected to Arduino D1
KY-026 Flame Sensors
VCCconnected to Arduino 5VGNDconnected to Arduino GNDDOconnected to Arduino analog pins A0, A1, A2
5V Relay
VCCconnected to Arduino 5VGNDconnected to Arduino GNDInconnected to Arduino D7Common terminalconnected to the 5V relay VCCNormally Openconnected to the water pump positive
Micro Servo 9G
+5Vconnected to Arduino 5VGNDconnected to Arduino GNDPWMconnected to Arduino D9
Documented Code
Arduino UNO Code (sketch.ino)
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
Note: The provided code is a template and does not include specific functionality. It needs to be populated with the logic for reading sensors, controlling motors, and handling Bluetooth communication.