Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO and L293D Bluetooth-Controlled Robotic Car with Ultrasonic Sensor
Circuit Documentation
Summary
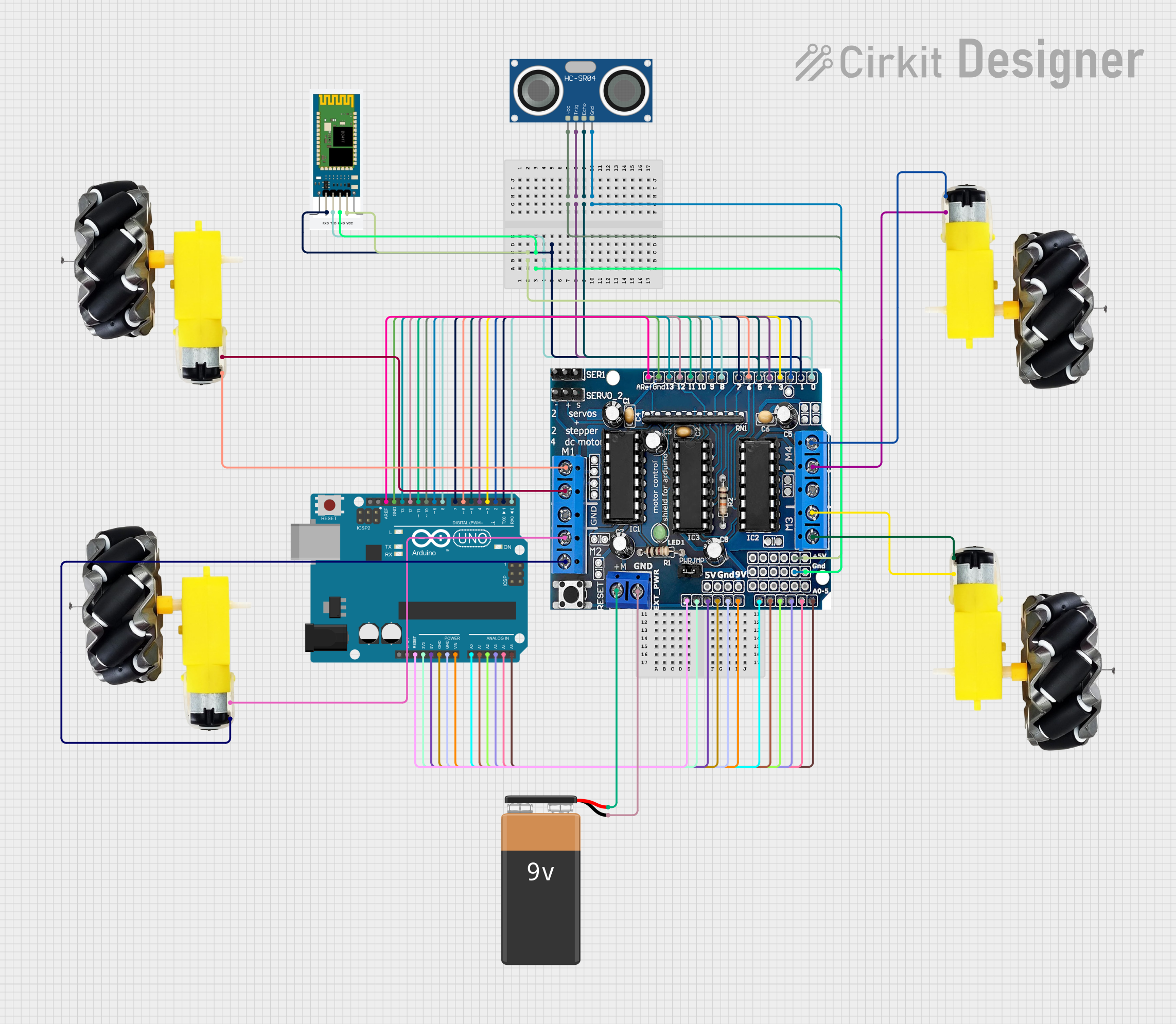
This document provides a detailed overview of a circuit designed to control a motorized vehicle using an Arduino UNO microcontroller, an L293D motor driver, an HC-SR04 ultrasonic sensor, and an HC-06 Bluetooth module. The circuit is powered by a 9V battery and includes multiple motors and wheels for movement. The Arduino UNO is programmed to receive commands via Bluetooth and control the motors accordingly.
Component List
L293D Motor Driver
- Description: Motor driver IC used to control the direction and speed of motors.
- Pins: 5V, GND, +, Servo1, Servo2, RX/DO, TX/D1, 9V, A0, A1, A2, A3, A4/SDA, A5/SCL, VIN, 3.3V, RESET, D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12, D13
Arduino UNO
- Description: Microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
HC-SR04 Ultrasonic Sensor
- Description: Ultrasonic distance sensor used for obstacle detection.
- Pins: VCC, TRIG, ECHO, GND
HC-06 Bluetooth Module
- Description: Bluetooth module used for wireless communication.
- Pins: RXD, TXD, GND, VCC
Motor and Wheels
- Description: Motors and wheels used for vehicle movement.
- Pins: vcc, GND
9V Battery
- Description: Power source for the circuit.
- Pins: -, +
Wiring Details
L293D Motor Driver
- 5V connected to VCC of HC-SR04 Ultrasonic Sensor
- 5V connected to VCC of HC-06 Bluetooth Module
- GND connected to GND of HC-SR04 Ultrasonic Sensor
- GND connected to GND of HC-06 Bluetooth Module
- GND connected to - of 9V Battery
- GND connected to GND of Motor and Wheels (multiple instances)
- + connected to + of 9V Battery
- + connected to vcc of Motor and Wheels (multiple instances)
- RX/DO connected to TXD of HC-06 Bluetooth Module and D0 of Arduino UNO
- TX/D1 connected to RXD of HC-06 Bluetooth Module and D1 of Arduino UNO
- GND connected to GND of Arduino UNO
- A0 connected to A0 of Arduino UNO
- A1 connected to A1 of Arduino UNO
- A2 connected to A2 of Arduino UNO
- A3 connected to A3 of Arduino UNO
- A4/SDA connected to A4 of Arduino UNO
- A5/SCL connected to A5 of Arduino UNO
- VIN connected to Vin of Arduino UNO
- 5V connected to 5V of Arduino UNO
- 3.3V connected to 3.3V of Arduino UNO
- RESET connected to Reset of Arduino UNO
- D2 connected to D2 of Arduino UNO
- D3 connected to D3 of Arduino UNO
- D4 connected to TRIG of HC-SR04 Ultrasonic Sensor and D4 of Arduino UNO
- D5 connected to ECHO of HC-SR04 Ultrasonic Sensor and D5 of Arduino UNO
- D6 connected to D6 of Arduino UNO
- D7 connected to D7 of Arduino UNO
- D8 connected to D8 of Arduino UNO
- D9 connected to D9 of Arduino UNO
- D10 connected to D10 of Arduino UNO
- D11 connected to D11 of Arduino UNO
- D12 connected to D12 of Arduino UNO
- D13 connected to D13 of Arduino UNO
- GND connected to AREF of Arduino UNO
Arduino UNO
- D0 connected to RX/DO of L293D Motor Driver
- D1 connected to TX/D1 of L293D Motor Driver
- GND connected to GND of L293D Motor Driver
- A0 connected to A0 of L293D Motor Driver
- A1 connected to A1 of L293D Motor Driver
- A2 connected to A2 of L293D Motor Driver
- A3 connected to A3 of L293D Motor Driver
- A4 connected to A4/SDA of L293D Motor Driver
- A5 connected to A5/SCL of L293D Motor Driver
- Vin connected to VIN of L293D Motor Driver
- 5V connected to 5V of L293D Motor Driver
- 3.3V connected to 3.3V of L293D Motor Driver
- Reset connected to RESET of L293D Motor Driver
- D2 connected to D2 of L293D Motor Driver
- D3 connected to D3 of L293D Motor Driver
- D4 connected to TRIG of HC-SR04 Ultrasonic Sensor and D4 of L293D Motor Driver
- D5 connected to ECHO of HC-SR04 Ultrasonic Sensor and D5 of L293D Motor Driver
- D6 connected to D6 of L293D Motor Driver
- D7 connected to D7 of L293D Motor Driver
- D8 connected to D8 of L293D Motor Driver
- D9 connected to D9 of L293D Motor Driver
- D10 connected to D10 of L293D Motor Driver
- D11 connected to D11 of L293D Motor Driver
- D12 connected to D12 of L293D Motor Driver
- D13 connected to D13 of L293D Motor Driver
- AREF connected to GND of L293D Motor Driver
HC-SR04 Ultrasonic Sensor
- VCC connected to 5V of L293D Motor Driver
- TRIG connected to D4 of L293D Motor Driver and D4 of Arduino UNO
- ECHO connected to D5 of L293D Motor Driver and D5 of Arduino UNO
- GND connected to GND of L293D Motor Driver
HC-06 Bluetooth Module
- VCC connected to 5V of L293D Motor Driver
- TXD connected to RX/DO of L293D Motor Driver and D0 of Arduino UNO
- RXD connected to TX/D1 of L293D Motor Driver and D1 of Arduino UNO
- GND connected to GND of L293D Motor Driver
Motor and Wheels
- vcc connected to + of L293D Motor Driver (multiple instances)
- GND connected to GND of L293D Motor Driver (multiple instances)
9V Battery
- + connected to + of L293D Motor Driver
- - connected to GND of L293D Motor Driver
Code Documentation
#include <SoftwareSerial.h>
// Define motor pins
#define IN1 9
#define IN2 8
#define IN3 7
#define IN4 6
#define ENA 10
#define ENB 5
// Bluetooth RX and TX pins
SoftwareSerial BTSerial(2, 3); // RX, TX
void setup() {
// Motor driver pins setup
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// Start Bluetooth communication
BTSerial.begin(