Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
ESP32 and Arduino Mega 2560 Controlled Peristaltic Pump System with Pressure and Flow Sensors
Circuit Documentation
Summary
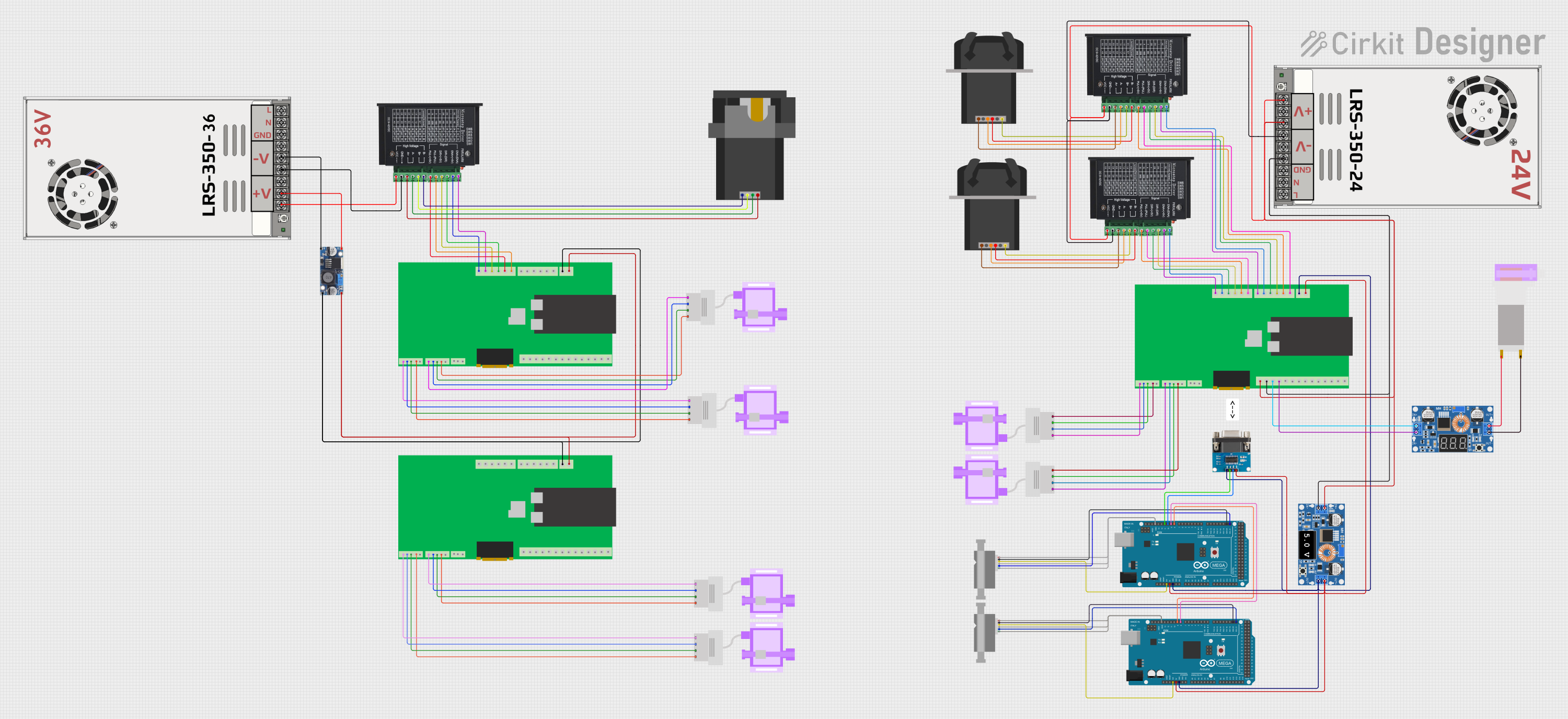
This document provides a detailed overview of the circuit, including a list of components, wiring details, and documented code for the microcontrollers used. The circuit includes various sensors, motor drivers, power supplies, and microcontrollers to achieve its functionality.
Component List
Pendotech Luer Lock In Line Pressure Sensor
- Pins: E-, S+, S-, E+
- Description: Pressure sensor for monitoring fluid pressure in the line.
- Purpose: To measure the pressure of the fluid in the system.
Sensirion Flow Meter
- Pins: green, red, y, blue, black, white
- Description: Flow meter for measuring the flow rate of fluids.
- Purpose: To measure the flow rate of the fluid in the system.
tb6600 Micro Stepping Motor Driver
- Pins: ENA-, ENA+, DIR-, DIR+, PUL-, PUL+, B-, B+, A-, A+, GND, VCC
- Description: Motor driver for controlling stepper motors.
- Purpose: To drive and control the stepper motors in the system.
48v to 5v Converter
- Pins: out+, out--, in+, in--
- Description: Voltage converter to step down from 48V to 5V.
- Purpose: To provide a 5V power supply from a 48V input.
313KB Peristaltic Pump
- Pins: A-, A+, B+, B-
- Description: Peristaltic pump for fluid transfer.
- Purpose: To pump fluids through the system.
MW LRS-350-48 Power Supply
- Pins: +48V output, -48V output, GND, N, L
- Description: 48V power supply.
- Purpose: To provide 48V power to the system.
Custom PCB w/ ESP32
- Pins: 5V Supply, GD, Outlet PUL-, Outlet PUL+, Outlet DIR-, Outlet DIR+, Outlet EN-, Outlet EN+, Inlet P E+, Inlet P S-, Inlet P S+, Inlet P E-, Shield, Valve GD, Valve V, GND, 24 V Supply, SIG, VCC, Outlet P E-, Outlet P S+, Outlet P S-, Outlet P E+, Inlet PUL-, Inlet PUL+, Inlet DIR-, Inlet DIR+, Inlet EN-, Inlet EN+, RS232
- Description: Custom PCB with an ESP32 microcontroller.
- Purpose: To control various components in the system.
Arduino Mega 2560
- Pins: IOREF, RESET, 3V3, 5V, GND, VIN, A0-A15, D21/SCL, D20/SDA, D19/RX1, D18/TX1, D17 PWM/RX2, D16 PWM/TX2, D15/RX3, D14/TX3, D0 RX0, D1 TX0, D2-D13 PWM, AREF, SDA, SCL, D52, D50, D48, D46, D44, D42, D40, D38, D36, D34, D32, D30, D28, D26, D24, D22, D53, D51, D49, D47, D45, D43, D41, D39, D37, D35, D33, D31, D29, D27, D25, D23
- Description: Microcontroller board based on the ATmega2560.
- Purpose: To control various components in the system.
RS232 to TTL Converter
- Pins: VCC, RXD, TXD, GND
- Description: Converter for RS232 to TTL signal levels.
- Purpose: To interface RS232 devices with TTL logic levels.
XL4015 5A DC Buck Step-down
- Pins: Output +, Output -, Input +, Input -
- Description: DC-DC buck converter.
- Purpose: To step down voltage to a desired level.
KPCS200 Peristaltic Pump
- Pins: B+, A+, B-, A-
- Description: Peristaltic pump for fluid transfer.
- Purpose: To pump fluids through the system.
KEF-HB1S10P Peristaltic Pump
- Pins: GD, V in
- Description: Peristaltic pump for fluid transfer.
- Purpose: To pump fluids through the system.
Wiring Details
Pendotech Luer Lock In Line Pressure Sensor
- E- connected to Custom PCB w/ ESP32 (Outlet P E-)
- S+ connected to Custom PCB w/ ESP32 (Outlet P S+)
- S- connected to Custom PCB w/ ESP32 (Outlet P S-)
- E+ connected to Custom PCB w/ ESP32 (Outlet P E+)
Sensirion Flow Meter
- green connected to Arduino Mega 2560 (GND)
- red connected to Arduino Mega 2560 (GND)
- y connected to Arduino Mega 2560 (3V3)
- blue connected to Arduino Mega 2560 (D21/SCL)
- black connected to Arduino Mega 2560 (D20/SDA)
- white connected to Arduino Mega 2560 (GND)
tb6600 Micro Stepping Motor Driver
- A- connected to 313KB Peristaltic Pump (A-)
- A+ connected to 313KB Peristaltic Pump (A+)
- B+ connected to 313KB Peristaltic Pump (B+)
- B- connected to 313KB Peristaltic Pump (B-)
- PUL- connected to Custom PCB w/ ESP32 (Inlet PUL-)
- PUL+ connected to Custom PCB w/ ESP32 (Inlet PUL+)
- DIR- connected to Custom PCB w/ ESP32 (Inlet DIR-)
- DIR+ connected to Custom PCB w/ ESP32 (Inlet DIR+)
- ENA- connected to Custom PCB w/ ESP32 (Inlet EN-)
- ENA+ connected to Custom PCB w/ ESP32 (Inlet EN+)
- GND connected to MW LRS-350-48 (-48V output)
- VCC connected to MW LRS-350-48 (+48V output)
48v to 5v Converter
- out+ connected to Custom PCB w/ ESP32 (5V Supply)
- out-- connected to Custom PCB w/ ESP32 (GD)
- in+ connected to MW LRS-350-48 (+48V output)
- in-- connected to MW LRS-350-48 (-48V output)
313KB Peristaltic Pump
- A- connected to tb6600 Micro Stepping Motor Driver (A-)
- A+ connected to tb6600 Micro Stepping Motor Driver (A+)
- B+ connected to tb6600 Micro Stepping Motor Driver (B+)
- B- connected to tb6600 Micro Stepping Motor Driver (B-)
MW LRS-350-48 Power Supply
- +48V output connected to tb6600 Micro Stepping Motor Driver (VCC)
- -48V output connected to tb6600 Micro Stepping Motor Driver (GND)
- +48V output connected to 48v to 5v Converter (in+)
- -48V output connected to 48v to 5v Converter (in--)
Custom PCB w/ ESP32
- 5V Supply connected to 48v to 5v Converter (out+)
- GD connected to 48v to 5v Converter (out--)
- Outlet P E- connected to Pendotech Luer Lock In Line Pressure Sensor (E-)
- Outlet P S+ connected to Pendotech Luer Lock In Line Pressure Sensor (S+)
- Outlet P S- connected to Pendotech Luer Lock In Line Pressure Sensor (S-)
- Outlet P E+ connected to Pendotech Luer Lock In Line Pressure Sensor (E+)
- Inlet P E- connected to Pendotech Luer Lock In Line Pressure Sensor (E-)
- Inlet P S+ connected to Pendotech Luer Lock In Line Pressure Sensor (S+)
- Inlet P S- connected to Pendotech Luer Lock In Line Pressure Sensor (S-)
- Inlet P E+ connected to Pendotech Luer Lock In Line Pressure Sensor (E+)
- Inlet PUL- connected to tb6600 Micro Stepping Motor Driver (PUL-)
- Inlet PUL+ connected to tb6600 Micro Stepping Motor Driver (PUL+)
- Inlet DIR- connected to tb6600 Micro Stepping Motor Driver (DIR-)
- Inlet DIR+ connected to tb6600 Micro Stepping Motor Driver