Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Raspberry Pi Pico W-Based Multi-Sensor Security System
Circuit Documentation
Summary
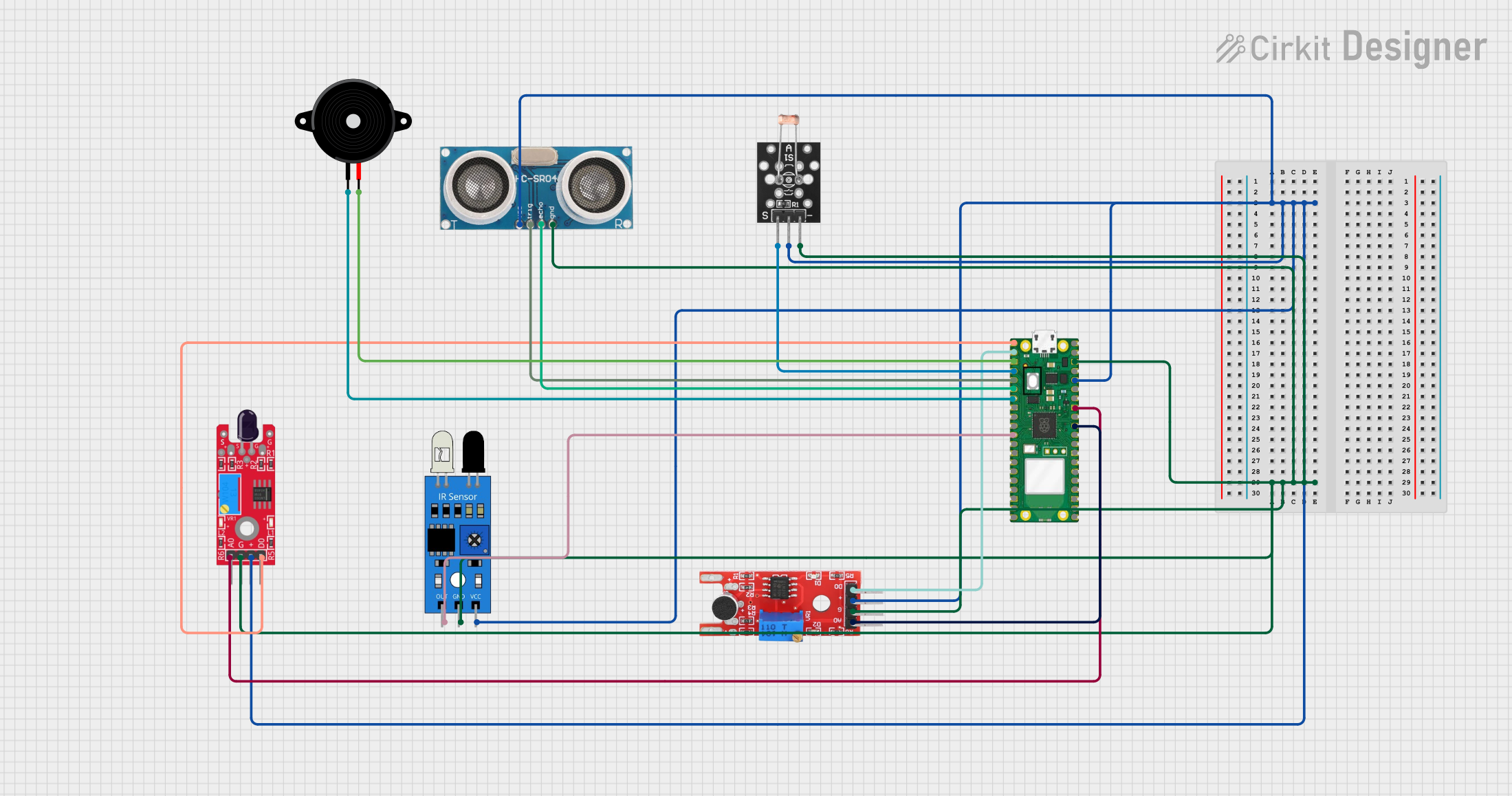
The circuit is designed for a prison security system that detects fire sources and monitors movements. It utilizes a Raspberry Pi Pico W as the central microcontroller to interface with various sensors including an IR sensor, a flame sensor, a sound sensor, an LDR photoresistor, and an ultrasonic sensor. The system alerts personnel using a piezo speaker when a fire or movement is detected. The circuit is powered by the 3.3V output from the Raspberry Pi Pico W and shares a common ground.
Component List
Raspberry Pi Pico W
- Microcontroller board with Wi-Fi capabilities.
- Used as the main processing unit for controlling sensors and executing the security system logic.
KY-038 Sound Sensor
- A module that detects sound levels with both analog and digital outputs.
- Used to detect sound above a certain threshold in the environment.
KY-018 LDR Photo Resistor
- A light-dependent resistor that changes resistance with light intensity.
- Used to detect changes in light levels, which may indicate a security breach.
Piezo Speaker
- An electronic device that emits sound when an electric current is applied.
- Used to alert personnel when the system detects an anomaly.
KY-026 Flame Sensor
- A sensor module that can detect flames or fire.
- Used to detect the presence of fire within the vicinity of the sensor.
IR Sensor
- An infrared sensor that detects infrared radiation from objects in its field of view.
- Used to detect the presence of individuals or objects moving within its range.
Ultrasonic Sensor
- A sensor that measures distance by emitting ultrasonic waves and measuring the time taken for the echo to return.
- Used to detect the presence of objects or individuals within a certain distance.
Wiring Details
Raspberry Pi Pico W
3v3 OUTconnected to the VCC of all sensors to provide power.GNDconnected to the ground of all sensors to complete the power circuit.GP0connected to the digital output (DO) of the KY-026 Flame Sensor.GP1connected to the digital output (D0) of the KY-038 Sound Sensor.GP2connected to the signal pin of the KY-018 LDR Photo Resistor.GP3connected to the trigger pin of the Ultrasonic Sensor.GP4connected to the echo pin of the Ultrasonic Sensor.GP5connected to one pin of the Piezo Speaker, the other pin connected to ground.GP8connected to the output of the IR Sensor.GND AGNDconnected to the analog output (AO) of the KY-026 Flame Sensor.GP26 ADC0connected to the analog output (A0) of the KY-038 Sound Sensor.
KY-038 Sound Sensor
+connected to3v3 OUTof Raspberry Pi Pico W for power.Gconnected toGNDof Raspberry Pi Pico W for ground.A0connected toGP26 ADC0of Raspberry Pi Pico W for analog sound level.D0connected toGP1of Raspberry Pi Pico W for digital sound detection.
KY-018 LDR Photo Resistor
Signalconnected toGP2of Raspberry Pi Pico W for light level detection.VCCconnected to3v3 OUTof Raspberry Pi Pico W for power.Groundconnected toGNDof Raspberry Pi Pico W for ground.
Piezo Speaker
pin1connected toGP5of Raspberry Pi Pico W to emit sound.pin2connected toGNDof Raspberry Pi Pico W for ground.
KY-026 Flame Sensor
AOconnected toGND AGNDof Raspberry Pi Pico W for analog flame level.GNDconnected toGNDof Raspberry Pi Pico W for ground.VCCconnected to3v3 OUTof Raspberry Pi Pico W for power.DOconnected toGP0of Raspberry Pi Pico W for digital flame detection.
IR Sensor
outconnected toGP8of Raspberry Pi Pico W for IR detection.gndconnected toGNDof Raspberry Pi Pico W for ground.vccconnected to3v3 OUTof Raspberry Pi Pico W for power.
Ultrasonic Sensor
+VCCconnected to3v3 OUTof Raspberry Pi Pico W for power.Triggerconnected toGP3of Raspberry Pi Pico W to initiate distance measurement.Echoconnected toGP4of Raspberry Pi Pico W to receive distance measurement.GNDconnected toGNDof Raspberry Pi Pico W for ground.
Documented Code
Raspberry Pi Pico W Code (sketch.ino)
/*
* Prison Security Project
* This code is designed to detect fire sources and monitor movements.
* It alerts the personnel using a piezo speaker when a fire or movement is detected.
*/
// Pin definitions
#define FLAME_SENSOR_PIN 0
#define SOUND_SENSOR_PIN 1
#define LDR_PIN 2
#define ULTRASONIC_TRIG_PIN 3
#define ULTRASONIC_ECHO_PIN 4
#define PIEZO_PIN 5
#define IR_SENSOR_PIN 8
// Constants
const int SOUND_THRESHOLD = 500;
const int FLAME_THRESHOLD = 100;
const int LDR_THRESHOLD = 300;
const int DISTANCE_THRESHOLD = 50; // in cm
void setup() {
// Initialize serial communication
Serial.begin(9600);
// Initialize pins
pinMode(FLAME_SENSOR_PIN, INPUT);
pinMode(SOUND_SENSOR_PIN, INPUT);
pinMode(LDR_PIN, INPUT);
pinMode(ULTRASONIC_TRIG_PIN, OUTPUT);
pinMode(ULTRASONIC_ECHO_PIN, INPUT);
pinMode(PIEZO_PIN, OUTPUT);
pinMode(IR_SENSOR_PIN, INPUT);
}
void loop() {
// Check sensors and alert if any are triggered
if (detectFlame() || detectSound() || detectLight() || detectMovement() || detectIR()) {
alertPersonnel();
}
delay(100); // Delay for stability
}
// Detect flame presence
bool detectFlame() {
if (digitalRead(FLAME_SENSOR_PIN) == HIGH) {
Serial.println("Flame detected!");
return true;
}
return false;
}
// Detect sound above threshold
bool detectSound() {
int soundLevel = analogRead(SOUND_SENSOR_PIN);
if (soundLevel > SOUND_THRESHOLD) {
Serial.println("Sound detected!");
return true;
}
return false;
}
// Detect light intensity above threshold
bool detectLight() {
int lightLevel = analogRead(LDR_PIN);
if (lightLevel > LDR_THRESHOLD) {
Serial.println("Light intensity change detected!");
return true;
}
return false;
}
// Detect object within specified distance
bool detectMovement() {
long duration, distance;
// Send ultrasonic pulse
digitalWrite(ULTRASONIC_TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(ULTRASONIC_TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(ULTRASONIC_TRIG_PIN, LOW);
// Read echo pulse duration and calculate distance
duration = pulseIn(ULTRASONIC_ECHO_PIN, HIGH);
distance = (duration / 2) / 29.1;
if (distance > 0 && distance < DISTANCE_THRESHOLD) {
Serial.println("Movement detected!");
return true;
}
return false;
}
// Detect IR sensor trigger
bool detectIR() {
if (digitalRead(IR_SENSOR_PIN) == HIGH) {
Serial.println("IR sensor triggered!");
return true;
}
return false;
}
// Alert personnel by activating the piezo speaker
void alertPersonnel() {
Serial.println("Alerting personnel...");
digitalWrite(PIEZO_PIN, HIGH);
delay(1000); // Alert duration
digitalWrite(PIEZO_PIN, LOW);
}
Other Microcontrollers
The other microcontrollers in the system have placeholder code or empty documentation files, indicating that they are not currently programmed with specific functionality for this project.