Arduino UNO-Based Waste Sorting System with Dual Servo Control and Metal Detection
Circuit Documentation
Summary
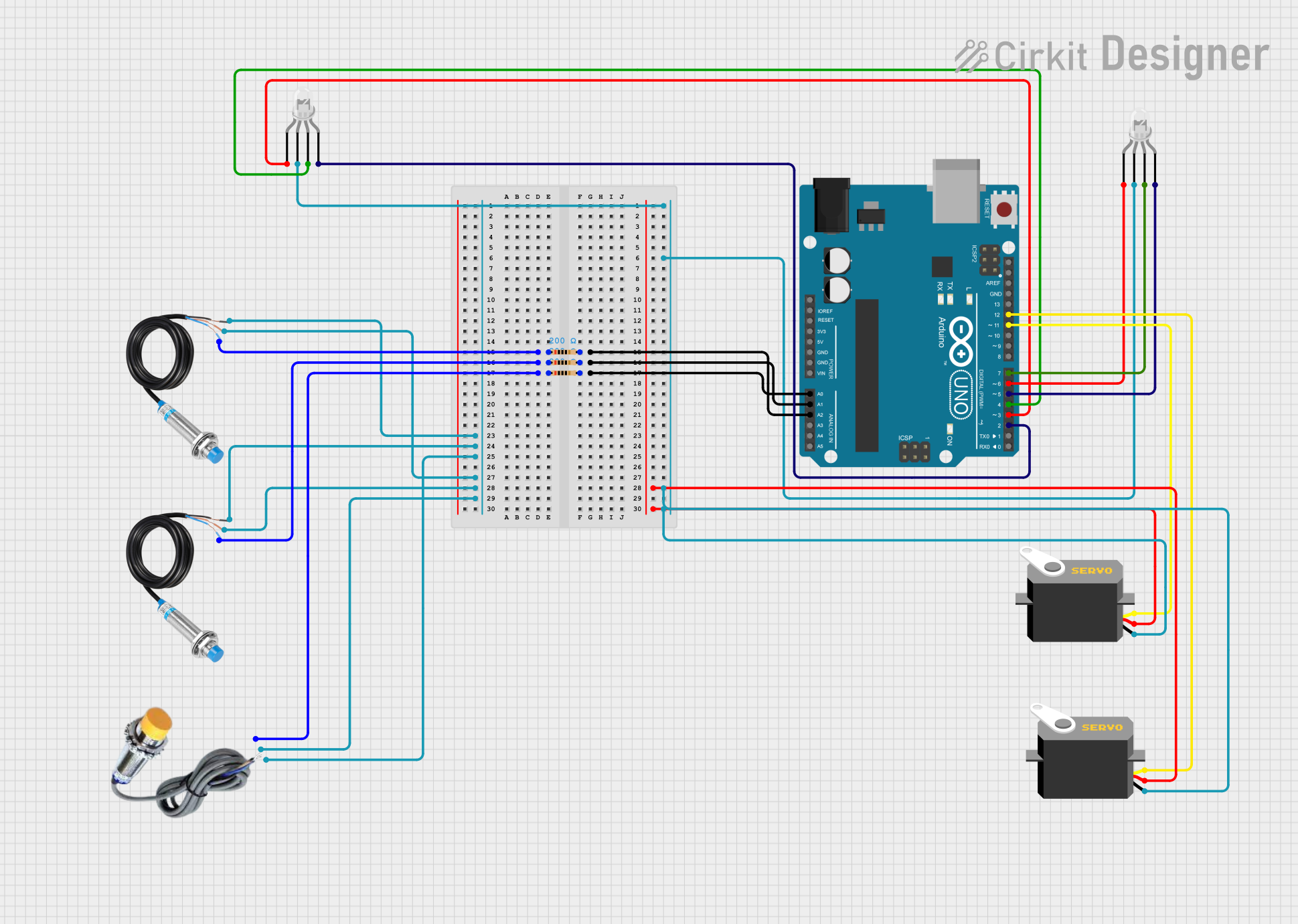
The circuit is designed to interface with various sensors and actuators using an Arduino UNO microcontroller. It includes metal detection sensors, a capacitive sensor, RGB LEDs (common cathode), resistors, and servo motors. The circuit is likely used for sorting materials based on metal content and possibly other parameters, controlling the position of bins with servo motors, and indicating status or categories with RGB LEDs.
Component List
Microcontroller
- Arduino UNO: A microcontroller board based on the ATmega328P. It has digital input/output pins, analog inputs, a USB connection for programming, and power management features.
Sensors
- Capacitive Sensor: A sensor used to detect touch or proximity. It has pins for ground (GND), power (VCC), and signal output (SIGNAL).
- Metal Detection Sensor: A sensor that detects the presence of metal. It has pins for power (POWER), ground (GND), and signal output (OUT).
Actuators
- Servo: A motor capable of precise control of angular position. It has pins for ground (gnd), power (vcc), and control signal (pulse).
Indicators
- LED: Four Pin (Common Cathode): An RGB LED with a common cathode and separate anodes for red, green, and blue.
Passive Components
- Resistor: A component that provides electrical resistance. Used in this circuit with a value of 200 Ohms.
Wiring Details
Arduino UNO
- Analog inputs A0, A1, and A2 are connected to the signal outputs of the capacitive sensor and metal detection sensors through 200 Ohm resistors.
- Digital pins D2, D3, D4, D5, D6, and D7 are connected to the anodes of two RGB LEDs.
- Digital pins D11 and D12 are connected to the control signal inputs of two servo motors.
Metal Detection Sensors
- The OUT pins are connected to the Arduino analog inputs through 200 Ohm resistors.
- The POWER and GND pins are interconnected among the sensors and with the capacitive sensor.
Capacitive Sensor
- The SIGNAL pin is connected to the Arduino analog input A0 through a 200 Ohm resistor.
- The VCC and GND pins are interconnected with the metal detection sensors.
Servo Motors
- The vcc pins are interconnected.
- The gnd pins are interconnected with the common cathodes of the RGB LEDs.
- The pulse pins are connected to the Arduino digital pins D11 and D12.
RGB LEDs (Common Cathode)
- The common cathodes are interconnected and also connected to the ground pins of the servo motors.
- The red, green, and blue anodes of each LED are connected to separate Arduino digital pins.
Documented Code
/// include library
#include <Servo.h> ///servo motor library
// Pin Definitions
//plastic bin pin
#define redpin 5
#define bluepin 6
#define greenpin 7
#define plasticsensor A0
#define metalsensor A1
#define IR_plastic A3
//metal bin pin definitions
#define redpin_M 8
#define bluepin_M 9
#define greenpin_M 10
#define metalsensor_M A2
#define IR_metal A3
Servo myservo; //create servo object to control a servo on plastic bin
Servo myservo_M; // create servo object to control a servo on metal bin
int pos = 165; // default servo position of plastic bin
int pos_M = 158; // default servo position of metal bin
void setup() {
myservo.attach(11); // attaches the plastic bin servo on pin 11 to the servo object
myservo_M.attach(12); // attaches the metal bin servo on pin 12 to the servo object
//RGB LED on plastic bin
pinMode(redpin,OUTPUT);
pinMode(bluepin,OUTPUT);
pinMode(greenpin,OUTPUT);
//RGB LED on metal bin
pinMode(redpin_M,OUTPUT);
pinMode(bluepin_M,OUTPUT);
pinMode(greenpin_M,OUTPUT);
//Create sensor values in pull up condition
pinMode(plasticsensor,INPUT_PULLUP);
pinMode(metalsensor,INPUT_PULLUP);
pinMode(metalsensor_M,INPUT_PULLUP);
//start serial monitor
Serial.begin(9600);
//Set RGB LED on default values (white)
analogWrite(redpin,255);
analogWrite(bluepin,255);
analogWrite(greenpin,255);
analogWrite(redpin_M,255);
analogWrite(bluepin_M,255);
analogWrite(greenpin_M,255);
}
void loop() {
int sensor_read_plastic = digitalRead(plasticsensor);
int sensor_read_metal = digitalRead(metalsensor);
int sensor_read_metal2 = digitalRead(metalsensor_M);
Serial.println("plastic sensor");
Serial.println(sensor_read_plastic);
Serial.println("metal sensor");
Serial.println(sensor_read_metal);
Serial.println(sensor_read_metal2);
///Check if the trash bin is full
//Plastic bin
if((sensor_read_plastic == 0) && (sensor_read_metal != 1)){
for (pos = 160; pos >= 90; pos -= 1) { // goes from 160 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(1); // waits 1ms for the servo to reach the position
}
analogWrite(redpin,255);
analogWrite(bluepin,0);
analogWrite(greenpin,255);
delay(2500);
for (pos = 90; pos <= 160; pos += 1) { // goes from 90 degrees to 160 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(1); // waits 1ms for the servo to reach the position
}
analogWrite(redpin,0);
analogWrite(bluepin,0);
analogWrite(greenpin,0);
}
else{
// keep the door closed
myservo.write(pos);
analogWrite(redpin,255);
analogWrite(bluepin,255);
analogWrite(greenpin,255);
}
//Metal bin
if(sensor_read_metal2 == 1){
for(pos_M = 160; pos_M >= 90; pos_M -= 1) { // goes from 160 degrees to 90 degrees
myservo_M.write(pos_M); // tell servo to go to position in variable 'pos'
delay(1); // waits 1ms for the servo to reach the position
}
analogWrite(redpin_M,255);
analogWrite(bluepin_M,0);
analogWrite(greenpin_M,255);
delay(2500);
for (pos_M = 90; pos_M <= 160; pos_M += 1) { // goes from 90 degrees to 160 degrees
myservo_M.write(pos_M); // tell servo to go to position in variable 'pos'
delay(1); // wait 1ms for the servo to reach the position
}
analogWrite(redpin_M,0);
analogWrite(bluepin_M,0);
analogWrite(greenpin_M,0);
}
else{
// keep the door closed
myservo_M.write(pos_M);
analogWrite(redpin_M,255);
analogWrite(bluepin_M,255);
analogWrite(greenpin_M,255);
}
}
This code is designed to control a sorting system with two bins, one for plastic and one for metal. It uses servo motors to open and close the bins, metal detection sensors to determine the type of material, and RGB LEDs to indicate the status. The code includes setup routines for the servos and LEDs, and a loop that reads sensor values, operates the servos, and sets the LED colors accordingly.