Arduino Uno-Based Automatic Water Pump with Ultrasonic Sensor and Relay Control
Circuit Documentation
Summary
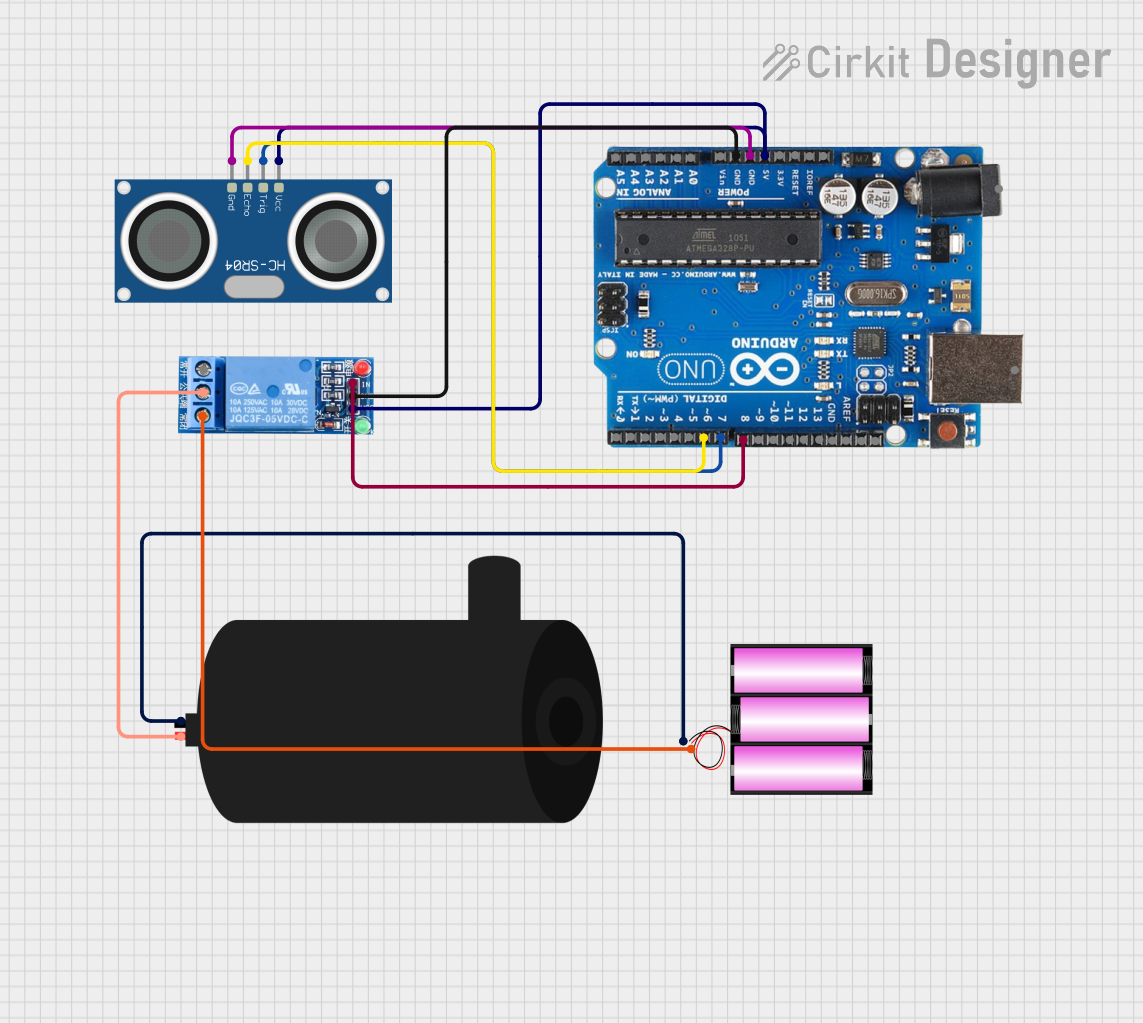
This circuit is designed to control a water pump using an ultrasonic sensor and a relay module, all managed by an Arduino Uno R3. The ultrasonic sensor detects the presence of an object (e.g., a hand) within a certain distance, and if the object is detected, the relay is activated to turn on the water pump. The pump remains on for a specified duration before turning off automatically.
Component List
Arduino Uno R3
- Description: A microcontroller board based on the ATmega328P.
- Pins: D8, D9, D10, D11, D12, D13, GND, AREF, SDA, SCL, D0/RX, D1/Tx, D2, D3, D4, D5, 6, D7, A5/SCL, A4/SDA, A3, A2, A1, A0, Vin, 5V, 3.3V, RESET, IOREF, NONE, USB Jack, Power Jack
1 Channel Relay 5V
- Description: A relay module that allows a low-power microcontroller to control a high-power device.
- Pins: VCC, GND, IN, NC, COM, NO
HC-SR04 Ultrasonic Sensor
- Description: An ultrasonic sensor used for distance measurement.
- Pins: VCC, TRIG, ECHO, GND
Water Pump
- Description: A 12V water pump.
- Pins: positive, negative
Battery 12V
- Description: A 12V battery used to power the water pump.
- Pins: +, -
Wiring Details
Arduino Uno R3
- D8: Connected to IN pin of the 1 Channel Relay 5V
- 6: Connected to ECHO pin of the HC-SR04 Ultrasonic Sensor
- D7: Connected to TRIG pin of the HC-SR04 Ultrasonic Sensor
- GND: Connected to GND pin of the 1 Channel Relay 5V and GND pin of the HC-SR04 Ultrasonic Sensor
- 5V: Connected to VCC pin of the 1 Channel Relay 5V and VCC pin of the HC-SR04 Ultrasonic Sensor
1 Channel Relay 5V
- IN: Connected to D8 pin of the Arduino Uno R3
- GND: Connected to GND pin of the Arduino Uno R3
- VCC: Connected to 5V pin of the Arduino Uno R3
- COM: Connected to positive pin of the Water Pump
- NO: Connected to + pin of the Battery 12V
HC-SR04 Ultrasonic Sensor
- ECHO: Connected to 6 pin of the Arduino Uno R3
- TRIG: Connected to D7 pin of the Arduino Uno R3
- GND: Connected to GND pin of the Arduino Uno R3
- VCC: Connected to 5V pin of the Arduino Uno R3
Water Pump
- positive: Connected to COM pin of the 1 Channel Relay 5V
- negative: Connected to - pin of the Battery 12V
Battery 12V
- +: Connected to NO pin of the 1 Channel Relay 5V
- -: Connected to negative pin of the Water Pump
Code Documentation
// Ultrasonic Sensor Pins
const int trigPin = 7;
const int echoPin = 6;
// Relay Pin
const int relayPin = 8;
// Threshold Distance (in cm)
const int thresholdDistance = 10;
// Variables to track motor state and time
bool motorState = false; // To track motor ON/OFF state
unsigned long motorStartTime = 0; // To track motor ON duration
bool handDetected = false; // To detect if hand is in range
void setup() {
// Initialize serial monitor
Serial.begin(9600);
// Set up pins
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(relayPin, OUTPUT);
// Ensure relay is off initially (for active LOW relay)
digitalWrite(relayPin, HIGH); // Relay off (HIGH for active LOW relays)
}
void loop() {
// Measure distance
long distance = getDistance();
// Debugging: Print distance
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Check if hand is detected
if (distance > 0 && distance <= thresholdDistance) {
if (!handDetected) {
handDetected = true; // Mark hand as detected
motorStartTime = millis(); // Record the time
digitalWrite(relayPin, LOW); // Turn ON motor (LOW for active LOW relay)
motorState = true;
Serial.println("Motor ON");
}
} else {
handDetected = false; // Reset detection when hand is removed
}
// Turn off motor after 3 seconds
if (motorState && millis() - motorStartTime >= 3000) {
digitalWrite(relayPin, HIGH); // Turn OFF motor (HIGH for active LOW relay)
motorState = false;
Serial.println("Motor OFF");
}
delay(100); // Stabilization delay
}
// Function to measure distance using ultrasonic sensor
long getDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH, 30000); // Timeout to avoid infinite wait
long distance = duration * 0.034 / 2;
return (distance > 0 && distance < 400) ? distance : -1; // Return valid distance
}
This code initializes the pins for the ultrasonic sensor and the relay, measures the distance using the ultrasonic sensor, and controls the relay to turn the water pump on and off based on the measured distance. The pump is turned on when an object is detected within the threshold distance and turned off after 3 seconds.