Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO Controlled Servo Motor
Circuit Documentation
Summary of the Circuit
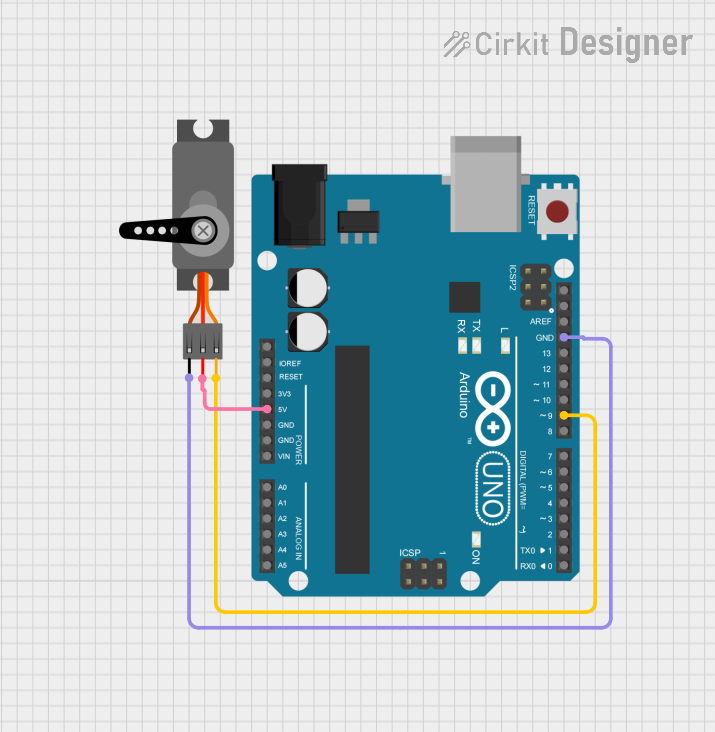
This circuit consists of an Arduino UNO microcontroller board that is used to control a servo motor. The Arduino UNO provides the necessary power and control signals to the servo. The servo motor is an actuator that can be precisely controlled to move to different positions based on the PWM (Pulse Width Modulation) signal it receives from the Arduino.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0-A5, SCL, SDA, AREF, D0-D13.
- Purpose: Acts as the central controller for the circuit, providing logic and power.
Servo
- Description: An electromechanical device that rotates parts of a machine with precision.
- Pins: GND, VCC, PWM.
- Purpose: Receives control signals to adjust its position.
Wiring Details
Arduino UNO
- 5V: Provides power to the servo motor.
- GND: Common ground with the servo motor.
- D9: Outputs PWM signal to control the servo motor.
Servo
- VCC: Connected to the 5V output from the Arduino UNO to receive power.
- GND: Connected to the ground (GND) on the Arduino UNO to complete the power circuit.
- PWM: Receives PWM control signal from pin D9 of the Arduino UNO.
Documented Code
Arduino UNO Code (sketch.ino)
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
The provided code is a template with empty setup() and loop() functions. The setup() function is intended to contain initialization code that runs once when the microcontroller is powered on or reset. The loop() function is designed to contain the main logic of the program, which runs repeatedly as long as the microcontroller is powered.
Additional Notes
- The code for the Arduino UNO is currently a skeleton and needs to be filled in with the logic to control the servo motor using PWM signals.
- The actual movement of the servo will be determined by the specific PWM signal duration, which is not yet defined in the provided code.
- The
documentation.txtfile is empty and does not contain any additional information about the code or circuit.