Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO-Based Robotic Hand with Ultrasonic Sensor and RGB LED Control
Circuit Documentation
Summary
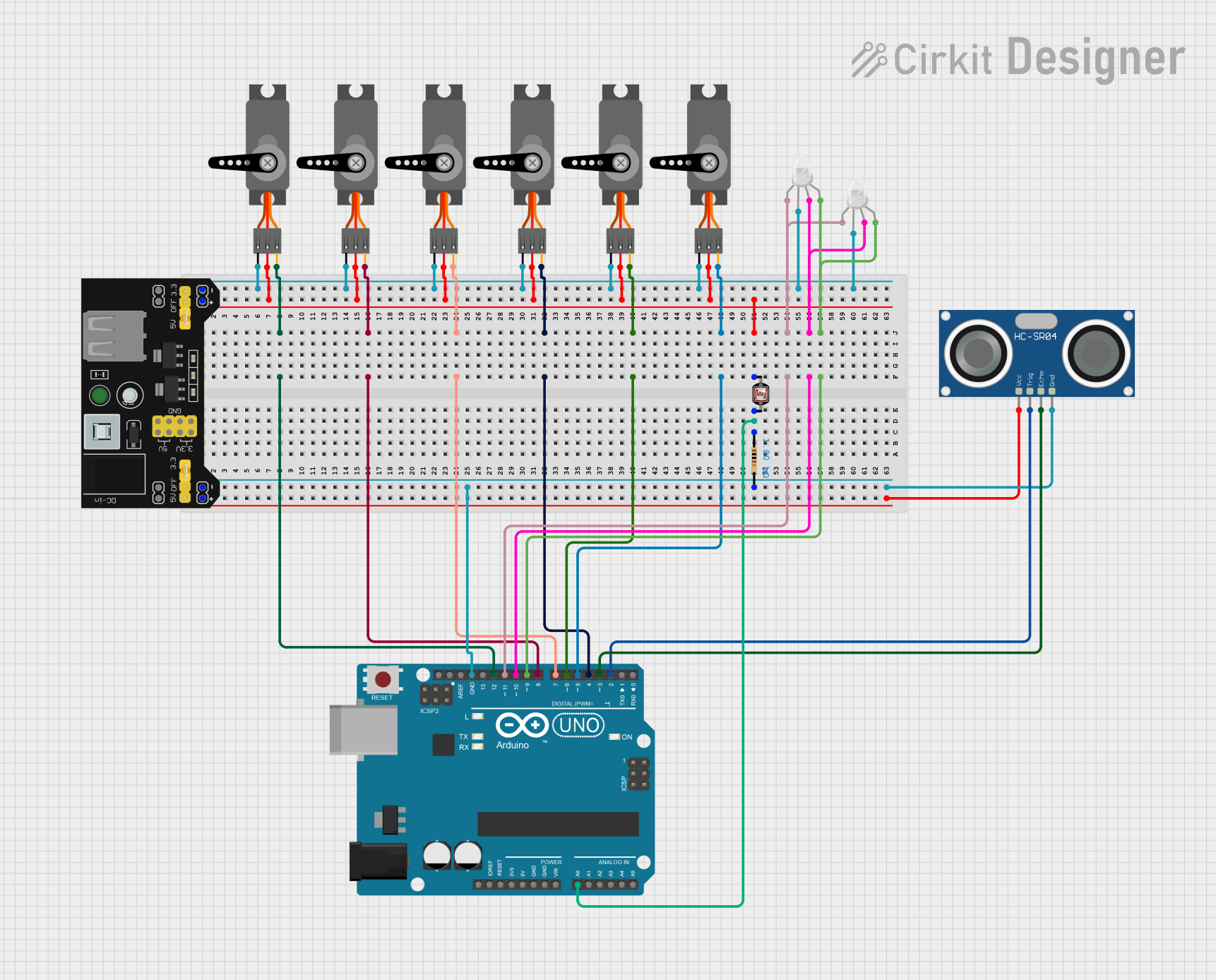
This circuit involves an Arduino UNO microcontroller, a breadboard power supply module, an ultrasonic sensor, multiple servos, RGB LEDs, a photocell (LDR), and a resistor. The circuit is designed to control various servos and LEDs based on sensor inputs.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
MB102 Breadboard Power Supply Module 3.3V/5V
- Description: A power supply module that provides 3.3V and 5V outputs.
- Pins: VCC, GND, 3.3V, 5V
HC-SR04 Ultrasonic Sensor
- Description: A sensor used to measure distance using ultrasonic waves.
- Pins: VCC, TRIG, ECHO, GND
Servo
- Description: A motor that can be controlled to move to a specific position.
- Pins: GND, VCC, PWM
Photocell (LDR)
- Description: A light-dependent resistor that changes resistance based on light intensity.
- Pins: pin 0, pin 1
Resistor
- Description: A 1000 Ohms resistor.
- Pins: pin1, pin2
- Properties: Resistance: 1000 Ohms
RGB LED (Wokwi compatible)
- Description: An RGB LED that can emit red, green, and blue light.
- Pins: R, COM, G, B
Wiring Details
Arduino UNO
- D12 connected to Servo PWM
- D8 connected to Servo PWM
- D7 connected to Servo PWM
- D4 connected to Servo PWM
- D6 connected to Servo PWM
- D5 connected to Servo PWM
- A0 connected to Resistor pin1 and Photocell (LDR) pin 1
- D11 connected to RGB LED R
- D10 connected to RGB LED G
- D9 connected to RGB LED B
- GND connected to MB102 Breadboard Power Supply Module GND, Resistor pin2, and HC-SR04 Ultrasonic Sensor GND
- D3 connected to HC-SR04 Ultrasonic Sensor ECHO
- D2 connected to HC-SR04 Ultrasonic Sensor TRIG
MB102 Breadboard Power Supply Module 3.3V/5V
- VCC connected to Photocell (LDR) pin 0, Servo VCC, and HC-SR04 Ultrasonic Sensor VCC
- GND connected to Arduino UNO GND, Servo GND, and RGB LED COM
HC-SR04 Ultrasonic Sensor
- VCC connected to MB102 Breadboard Power Supply Module VCC
- TRIG connected to Arduino UNO D2
- ECHO connected to Arduino UNO D3
- GND connected to Arduino UNO GND
Servo
- PWM connected to Arduino UNO D12, D8, D7, D4, D6, D5
- VCC connected to MB102 Breadboard Power Supply Module VCC
- GND connected to MB102 Breadboard Power Supply Module GND
Photocell (LDR)
- pin 0 connected to MB102 Breadboard Power Supply Module VCC
- pin 1 connected to Resistor pin1 and Arduino UNO A0
Resistor
- pin1 connected to Photocell (LDR) pin 1 and Arduino UNO A0
- pin2 connected to Arduino UNO GND
RGB LED (Wokwi compatible)
- R connected to Arduino UNO D11
- G connected to Arduino UNO D10
- B connected to Arduino UNO D9
- COM connected to MB102 Breadboard Power Supply Module GND
Code Documentation
Arduino UNO Code
sketch.ino
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
documentation.txt