ESP-32 Controlled Servo Motor System
Circuit Documentation
Summary of the Circuit
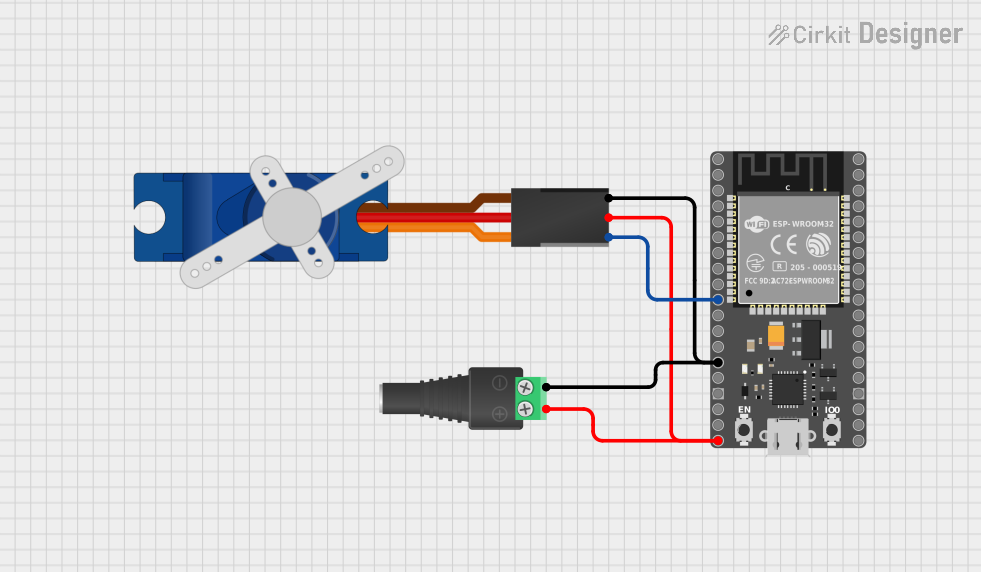
This circuit consists of an ESP-32 microcontroller module, a Tower Pro SG90 servo motor, and a 2.1mm Barrel Jack with Terminal Block for power input. The ESP-32 is responsible for controlling the servo motor by sending PWM (Pulse Width Modulation) signals through one of its GPIO pins. The servo motor is powered directly from the power input through the barrel jack, which also supplies power to the ESP-32 module. The ground connections are shared among all components, creating a common reference point for the circuit.
Component List
HiLetgo ESP-32
- Description: A microcontroller module based on the ESP-32 chip, which is a powerful, generic Wi-Fi+BT+BLE MCU module that targets a wide variety of applications.
- Pins: 3.3V, EN, GPIOs, GND, VIN, etc.
- Purpose: Acts as the central processing unit of the circuit, controlling the servo motor and managing wireless communication if needed.
Tower Pro SG90 Servo
- Description: A small and lightweight servo motor suitable for a broad range of applications.
- Pins: Signal, +5V, GND.
- Purpose: Executes mechanical movements based on the PWM signals received from the ESP-32.
2.1mm Barrel Jack with Terminal Block
- Description: A power connector that allows for easy connection to an external power supply.
- Pins: POS, NEG.
- Purpose: Provides power to the circuit components.
Wiring Details
HiLetgo ESP-32
- GPIO26: Connected to the Signal pin of the Tower Pro SG90 servo.
- GND: Shared ground connection with the Tower Pro SG90 servo and the 2.1mm Barrel Jack.
- VIN: Connected to the POS pin of the 2.1mm Barrel Jack to receive power.
Tower Pro SG90 Servo
- Signal: Receives PWM signal from GPIO26 of the HiLetgo ESP-32.
- +5V: Connected to the POS pin of the 2.1mm Barrel Jack to receive power.
- GND: Shared ground connection with the HiLetgo ESP-32 and the 2.1mm Barrel Jack.
2.1mm Barrel Jack with Terminal Block
- NEG: Connected to the GND pins of both the HiLetgo ESP-32 and the Tower Pro SG90 servo to provide a common ground.
- POS: Connected to the VIN pin of the HiLetgo ESP-32 and the +5V pin of the Tower Pro SG90 servo to supply power.
Documented Code
There is no code provided for the microcontroller in this circuit. Typically, the ESP-32 would be programmed to generate PWM signals on the GPIO pin connected to the servo motor to control its position. The code would be written in a suitable programming language, such as C or Python, and uploaded to the ESP-32 using an IDE like Arduino IDE or ESP-IDF.
Since no code is provided, we cannot document it. However, if code were available, this section would include detailed explanations of the code's functionality, setup procedures, and any libraries or dependencies required for the ESP-32 to operate the servo motor.