Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO Bluetooth-Controlled Robotic Car with Ultrasonic Distance Sensing
Circuit Documentation
Summary
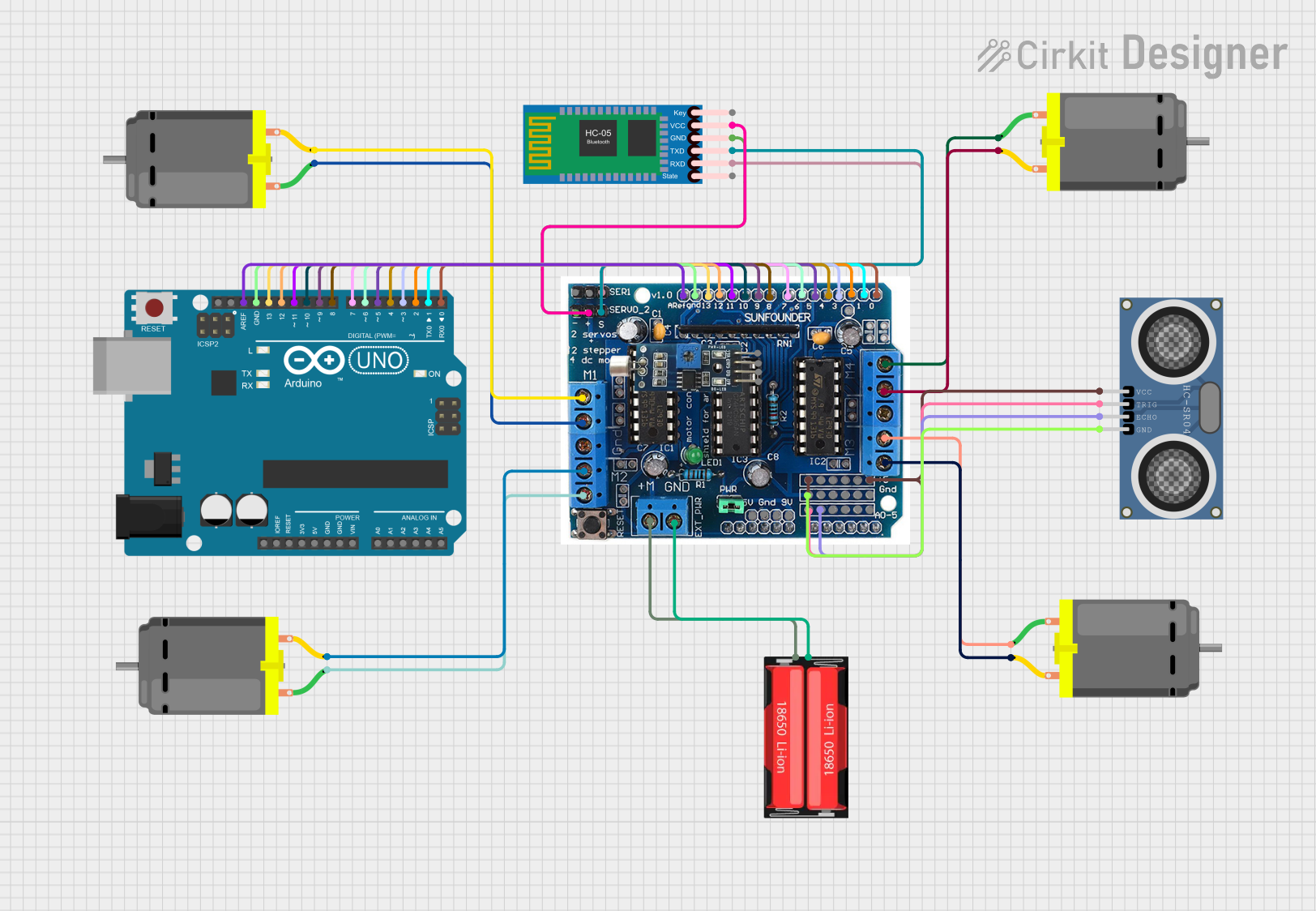
This circuit is designed to control a set of DC motors using an Arduino UNO and an L293D motor driver shield. The circuit also includes an HC-SR04 ultrasonic distance sensor, a sound sensor, and an HC-05 Bluetooth module for remote control. The power is supplied by a 18650 Li-Ion battery.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
L293D Driver Shield
- Description: A motor driver shield capable of driving four DC motors.
- Pins: 5v, GND, A0, A1, A2, A3, A4, A5, M+, M2, M2, M1, M3, M4, 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, gnd, Aref, ser1, Servo2, +, -, 9v
18650 Li-Ion Battery
- Description: A rechargeable lithium-ion battery.
- Pins: Positive, Negative
DC Motor (4 units)
- Description: A simple DC motor.
- Pins: pin 1, pin 2
HC-SR04 Ultrasonic Distance Sensor
- Description: A sensor used to measure distance using ultrasonic waves.
- Pins: VCC, TRIG, ECHO, GND
Sound Sensor
- Description: A sensor used to detect sound levels.
- Pins: VCC, GND, DO, AO
HC-05 Bluetooth Module
- Description: A Bluetooth module used for wireless communication.
- Pins: Key, VCC, GND, TXD, RXD, State
Wiring Details
Arduino UNO
- AREF connected to Aref of L293D Driver Shield
- GND connected to gnd of L293D Driver Shield
- D13 connected to 12 of L293D Driver Shield
- D12 connected to 12 of L293D Driver Shield
- D11 connected to 11 of L293D Driver Shield
- D10 connected to 10 of L293D Driver Shield
- D9 connected to 9 of L293D Driver Shield
- D8 connected to 8 of L293D Driver Shield
- D7 connected to 7 of L293D Driver Shield
- D6 connected to 6 of L293D Driver Shield
- D5 connected to 5 of L293D Driver Shield
- D4 connected to 4 of L293D Driver Shield
- D3 connected to 3 of L293D Driver Shield
- D2 connected to 2 of L293D Driver Shield
- D1 connected to 1 of L293D Driver Shield
- D0 connected to 0 of L293D Driver Shield
L293D Driver Shield
- 5v connected to 5v of HC-SR04 Ultrasonic Distance Sensor
- GND connected to GND of HC-SR04 Ultrasonic Distance Sensor
- A0 connected to TRIG of HC-SR04 Ultrasonic Distance Sensor
- A1 connected to ECHO of HC-SR04 Ultrasonic Distance Sensor
- M+ connected to Positive of 18650 Li-Ion Battery
- GND connected to Negative of 18650 Li-Ion Battery
- M2 connected to pin 1 of DC Motor
- M2 connected to pin 2 of DC Motor
- M1 connected to pin 1 of DC Motor
- M1 connected to pin 2 of DC Motor
- M3 connected to pin 1 of DC Motor
- M3 connected to pin 2 of DC Motor
- M4 connected to pin 1 of DC Motor
- M4 connected to pin 2 of DC Motor
- ser1 connected to RXD of HC-05 Bluetooth Module
- Servo2 connected to TXD of HC-05 Bluetooth Module
- + connected to VCC of HC-05 Bluetooth Module
- - connected to GND of HC-05 Bluetooth Module
HC-SR04 Ultrasonic Distance Sensor
- VCC connected to 5v of L293D Driver Shield
- GND connected to GND of L293D Driver Shield
- TRIG connected to A0 of L293D Driver Shield
- ECHO connected to A1 of L293D Driver Shield
18650 Li-Ion Battery
- Positive connected to M+ of L293D Driver Shield
- Negative connected to GND of L293D Driver Shield
DC Motor (4 units)
- pin 1 connected to M2 of L293D Driver Shield
- pin 2 connected to M2 of L293D Driver Shield
- pin 1 connected to M1 of L293D Driver Shield
- pin 2 connected to M1 of L293D Driver Shield
- pin 1 connected to M3 of L293D Driver Shield
- pin 2 connected to M3 of L293D Driver Shield
- pin 1 connected to M4 of L293D Driver Shield
- pin 2 connected to M4 of L293D Driver Shield
HC-05 Bluetooth Module
- RXD connected to ser1 of L293D Driver Shield
- TXD connected to Servo2 of L293D Driver Shield
- VCC connected to + of L293D Driver Shield
- GND connected to - of L293D Driver Shield
Documented Code
#include <AFMotor.h>
#include <SoftwareSerial.h>
SoftwareSerial bluetoothSerial(9, 10); // RX, TX
//initial motors pin
AF_DCMotor motor1(1, MOTOR12_1KHZ);
AF_DCMotor motor2(2, MOTOR12_1KHZ);
AF_DCMotor motor3(3, MOTOR34_1KHZ);
AF_DCMotor motor4(4, MOTOR34_1KHZ);
char command;
void setup()
{
bluetoothSerial.begin(9600); //Set the baud rate to your Bluetooth module.
}
void loop() {
if (bluetoothSerial.available() > 0) {
command = bluetoothSerial.read();
Stop(); //initialize with motors stoped
switch (command) {
case 'F':
forward();
break;
case 'B':
back();
break;
case 'L':
left();
break;
case 'R':
right();
break;
}
}
}
void forward()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
motor3.setSpeed(255); //Define maximum velocity
motor3.run(FORWARD); //rotate the motor clockwise
motor4.setSpeed(255); //Define maximum velocity
motor4.run(FORWARD); //rotate the motor clockwise
}
void back()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(BACKWARD); //rotate the motor anti-clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(BACKWARD); //rotate the motor anti-clockwise
motor3.setSpeed(255); //Define maximum velocity
motor3.run(BACKWARD); //rotate the motor anti-clockwise
motor4.setSpeed(255); //Define maximum velocity
motor4.run(BACKWARD); //rotate the motor anti-clockwise
}
void left()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(BACKWARD); //rotate the motor anti-clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
motor3.setSpeed(255); //Define maximum velocity
motor3.run