Arduino-Controlled Dual Stepper Motor System with Bluetooth Interface
Circuit Documentation
Summary
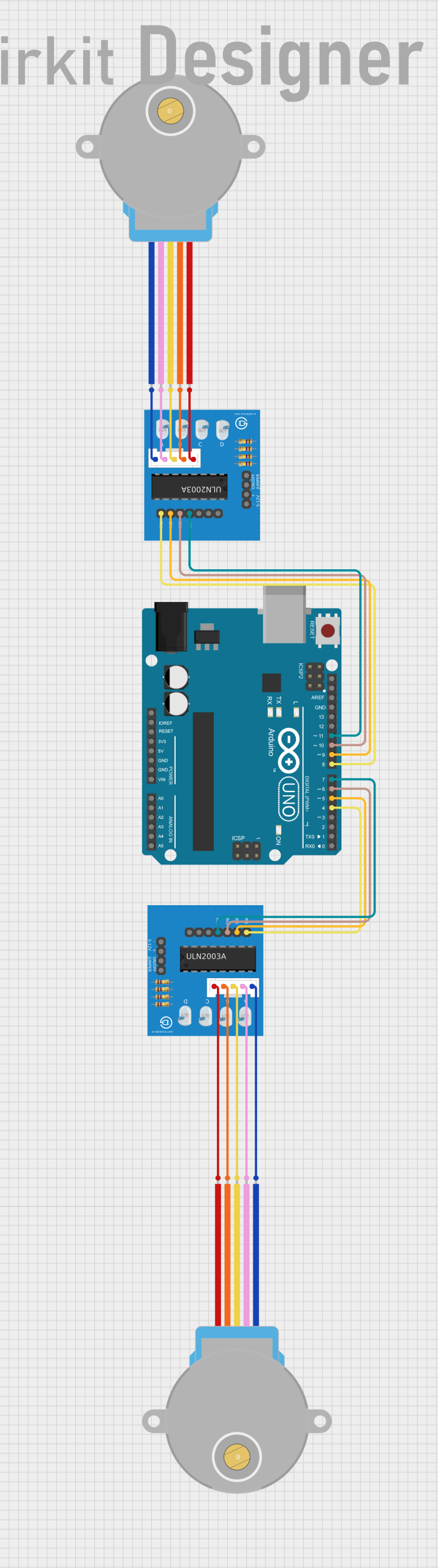
This circuit is designed to control two 28BYJ-48 stepper motors using an Arduino UNO microcontroller and two ULN2003A breakout boards. The Arduino UNO is programmed to receive commands via its serial interface to control the direction and state (running or stopped) of the stepper motors. The ULN2003A breakout boards serve as the driving interface between the low-power Arduino digital outputs and the higher-power requirements of the stepper motors.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P.
- Purpose: Acts as the central controller for the circuit, executing the embedded code to control the stepper motors.
28BYJ-48 Stepper Motor (x2)
- Description: A small, 5-wire, unipolar stepper motor.
- Purpose: Converts electrical pulses into discrete mechanical movements.
ULN2003A Breakout Board (x2)
- Description: A board containing the ULN2003A Darlington transistor array, used for driving stepper motors.
- Purpose: Interfaces between the Arduino UNO and the stepper motors, providing the necessary current and voltage levels.
Wiring Details
Arduino UNO
- D8: Connected to ULN2003A breakout board In 1 (Motor 1)
- D9: Connected to ULN2003A breakout board In 2 (Motor 1)
- D10: Connected to ULN2003A breakout board In 3 (Motor 1)
- D11: Connected to ULN2003A breakout board In 4 (Motor 1)
- D4: Connected to ULN2003A breakout board In 1 (Motor 2)
- D5: Connected to ULN2003A breakout board In 2 (Motor 2)
- D6: Connected to ULN2003A breakout board In 3 (Motor 2)
- D7: Connected to ULN2003A breakout board In 4 (Motor 2)
28BYJ-48 Stepper Motor 1
- BLUE: Connected to ULN2003A breakout board BLUE wire (Motor 1)
- PINK: Connected to ULN2003A breakout board PINK wire (Motor 1)
- YELLOW: Connected to ULN2003A breakout board YELLOW wire (Motor 1)
- ORANGE: Connected to ULN2003A breakout board ORANGE wire (Motor 1)
- RED: Connected to ULN2003A breakout board RED wire (Motor 1)
28BYJ-48 Stepper Motor 2
- BLUE: Connected to ULN2003A breakout board BLUE wire (Motor 2)
- PINK: Connected to ULN2003A breakout board PINK wire (Motor 2)
- YELLOW: Connected to ULN2003A breakout board YELLOW wire (Motor 2)
- ORANGE: Connected to ULN2003A breakout board ORANGE wire (Motor 2)
- RED: Connected to ULN2003A breakout board RED wire (Motor 2)
ULN2003A Breakout Board 1 (Motor 1)
- In 1 - In 4: Connected to Arduino UNO pins D8 - D11 respectively
- BLUE wire - RED wire: Connected to corresponding wires of Stepper Motor 1
ULN2003A Breakout Board 2 (Motor 2)
- In 1 - In 4: Connected to Arduino UNO pins D4 - D7 respectively
- BLUE wire - RED wire: Connected to corresponding wires of Stepper Motor 2
Documented Code
#include <AccelStepper.h>
// Define the pins for motor 1
AccelStepper motor1(AccelStepper::HALF4WIRE, 8, 10, 9, 11);
// Define the pins for motor 2
AccelStepper motor2(AccelStepper::HALF4WIRE, 4, 6, 5, 7);
// Set initial rotation speed
const int rotationSpeed = 500;
void setup() {
// Set up the serial communication for Bluetooth
Serial.begin(9600);
motor1.setMaxSpeed(rotationSpeed);
motor1.setAcceleration(500);
motor1.setCurrentPosition(0);
motor2.setMaxSpeed(rotationSpeed);
motor2.setAcceleration(500);
motor2.setCurrentPosition(0);
}
void loop() {
// Check if data is available from the Bluetooth app
if (Serial.available() > 0) {
char command = Serial.read();
// Write commands for the app
switch (command) {
case 'F': // Start both motors rotating forward
motor1.setSpeed(rotationSpeed);
motor2.setSpeed(rotationSpeed);
motor1.enableOutputs();
motor2.enableOutputs();
break;
case 'B': // Start both motors rotating backward
motor1.setSpeed(-rotationSpeed);
motor2.setSpeed(-rotationSpeed);
motor1.enableOutputs();
motor2.enableOutputs();
break;
case 'S': // Stop and disconnect both motors
motor1.setSpeed(0); // Set speed to 0 to stop immediately
motor2.setSpeed(0); // Set speed to 0 to stop immediately
motor1.disableOutputs(); // Disable outputs to disconnect motors
motor2.disableOutputs(); // Disable outputs to disconnect motors
break;
default:
// Ignore any other commands
break;
}
}
// Run motors
motor1.runSpeed();
motor2.runSpeed();
}
Filename: sketch.ino
Description: This code snippet is the main program for the Arduino UNO. It initializes two AccelStepper objects for controlling the stepper motors. The setup function configures the serial communication and sets the maximum speed and acceleration for both motors. The loop function listens for serial commands to control the motors' speed and direction.