Arduino-Powered 2.9" Greyscale eInk Display with Checkerboard Pattern
Circuit Documentation
Summary
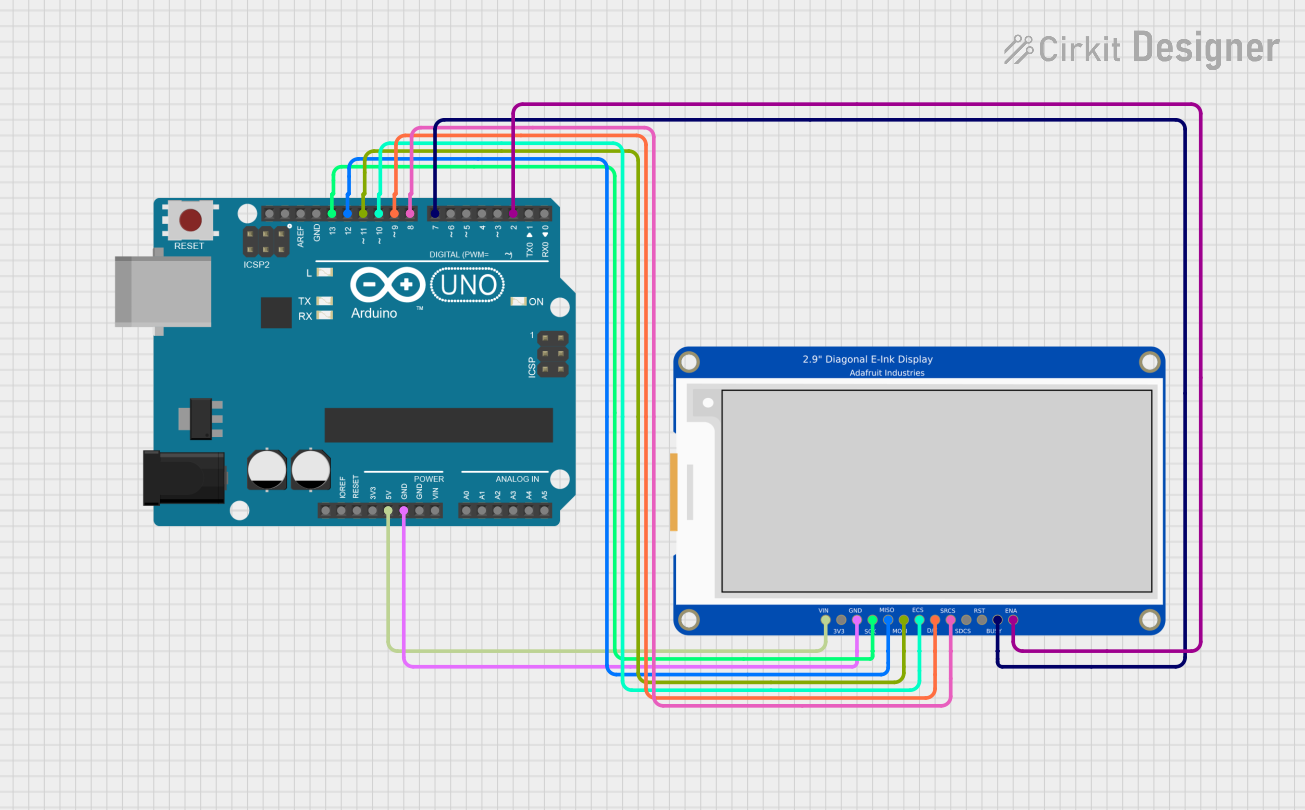
This circuit is designed to interface an Arduino UNO with a 2.9" Greyscale eInk display. The Arduino serves as the microcontroller, controlling the display through SPI communication. The code initializes the display, draws a checkerboard pattern, and allows for the inversion of the pattern after a delay. The eInk display retains the image without requiring continuous updates, making it suitable for low-power applications.
Component List
Arduino UNO
- Description: A microcontroller board based on the ATmega328P. It is used for various applications, including controlling sensors, motors, and displays.
- Purpose in Circuit: Acts as the main controller for the eInk display, handling the communication and display updates.
2.9" Greyscale eInk
- Description: A low-power display technology that retains images without power. It is suitable for applications where power consumption is critical.
- Purpose in Circuit: Displays the output from the Arduino, specifically the checkerboard pattern and its inverted version.
Wiring Details
Arduino UNO
5V: Connected to VIN of the 2.9" Greyscale eInk display.
GND: Connected to GND of the 2.9" Greyscale eInk display.
D13: Connected to SCLK of the 2.9" Greyscale eInk display.
D12: Connected to MISO of the 2.9" Greyscale eInk display.
D11: Connected to MOSI of the 2.9" Greyscale eInk display.
D10: Connected to DISPCS of the 2.9" Greyscale eInk display.
D9: Connected to DC of the 2.9" Greyscale eInk display.
D8: Connected to SRAMCS of the 2.9" Greyscale eInk display (used as RESET).
D7: Connected to BUSY of the 2.9" Greyscale eInk display.
D2: Connected to ENABLE of the 2.9" Greyscale eInk display.
Documented Code
/*
* Arduino Sketch for interfacing with a 2.9" Greyscale eInk display.
* This code initializes the display, draws a checkerboard pattern, and
* then inverts the pattern after a delay. The display holds the image
* without continuous updates. The pin connections are configured to
* match the specified wiring between the Arduino UNO and the eInk display.
*/
#include <SPI.h>
// Pin mapping (Arduino Uno)
const int PIN_CS = 10; // DISPCS
const int PIN_DC = 9; // Data/Command: LOW=cmd, HIGH=data
const int PIN_RST = 8; // SRAMCS (used as RESET)
const int PIN_BUSY = 7; // BUSY (HIGH during refresh)
const int PIN_EN = 2; // ENABLE (HIGH to accept writes)
// Display geometry (matches simulator)
const uint16_t EPD_WIDTH = 296;
const uint16_t EPD_HEIGHT = 128;
void epdWriteByte(uint8_t b, bool isData) {
digitalWrite(PIN_DC, isData ? HIGH : LOW);
digitalWrite(PIN_CS, LOW);
SPI.transfer(b);
digitalWrite(PIN_CS, HIGH);
}
void epdCommand(uint8_t cmd) {
epdWriteByte(cmd, false);
}
void epdData(const uint8_t* buf, size_t len) {
digitalWrite(PIN_DC, HIGH);
digitalWrite(PIN_CS, LOW);
for (size_t i = 0; i < len; i++) {
SPI.transfer(buf[i]);
}
digitalWrite(PIN_CS, HIGH);
}
void epdWaitWhileBusy() {
// BUSY goes HIGH only during refresh and returns LOW when done.
while (digitalRead(PIN_BUSY) == HIGH) {
delay(1);
}
}
void epdReset() {
digitalWrite(PIN_RST, LOW);
delay(10);
digitalWrite(PIN_RST, HIGH);
delay(10);
}
void drawCheckerboard() {
// Send WRITE RAM (0x24), then stream 1bpp pixels (MSB first).
epdCommand(0x24);
const uint16_t bytesPerRow = EPD_WIDTH / 8; // 296/8 = 37
uint8_t rowBuf[bytesPerRow];
for (uint16_t y = 0; y < EPD_HEIGHT; y++) {
for (uint16_t bx = 0; bx < bytesPerRow; bx++) {
uint8_t b = 0;
for (int bit = 7; bit >= 0; bit--) {
uint16_t x = bx * 8 + (7 - bit); // MSB is leftmost pixel
// 8x8 checkerboard: white=1, black=0
bool white = (((x / 8) + (y / 8)) % 2) == 0;
b |= (white ? 1 : 0) << bit;
}
rowBuf[bx] = b;
}
epdData(rowBuf, bytesPerRow);
}
// Trigger display refresh (0x20)
epdCommand(0x20);
epdWaitWhileBusy();
}
void setup() {
// Pins
pinMode(PIN_CS, OUTPUT);
pinMode(PIN_DC, OUTPUT);
pinMode(PIN_RST, OUTPUT);
pinMode(PIN_BUSY, INPUT);
pinMode(PIN_EN, OUTPUT);
// Ensure proper idle states
digitalWrite(PIN_CS, HIGH);
digitalWrite(PIN_DC, HIGH);
digitalWrite(PIN_RST, HIGH);
digitalWrite(PIN_EN, HIGH); // ENABLE the panel for writes
// SPI init (Mode 0, MSB first). Speed not critical in simulator.
SPI.begin();
SPI.beginTransaction(SPISettings(4000000, MSBFIRST, SPI_MODE0));
// Panel reset + software reset
epdReset();
epdCommand(0x12); // SWRESET
delay(10);
// Draw first image
drawCheckerboard();
// Optional: after a pause, invert the checkerboard to verify a second update
delay(2000);
// Write inverted checkerboard
epdCommand(0x24);
const uint16_t bytesPerRow = EPD_WIDTH / 8;
for (uint16_t y = 0; y < EPD_HEIGHT; y++) {
for (uint16_t bx = 0; bx < bytesPerRow; bx++) {
uint8_t b = 0;
for (int bit = 7; bit >= 0; bit--) {
uint16_t x = bx * 8 + (7 - bit);
bool white = (((x / 8) + (y / 8)) % 2) != 0; // inverted
b |= (white ? 1 : 0) << bit;
}
epdWriteByte(b, true);
}
}
epdCommand(0x20);
epdWaitWhileBusy();
// Done. Leave SPI configured.
}
void loop() {
// No continuous updates required for ePaper; it holds image.
}
This documentation provides a comprehensive overview of the circuit, detailing the components used, their connections, and the code that drives the functionality of the eInk display.