Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino UNO-Based Alcohol Detection and GPS Tracking System with Wi-Fi Connectivity
Circuit Documentation
Summary
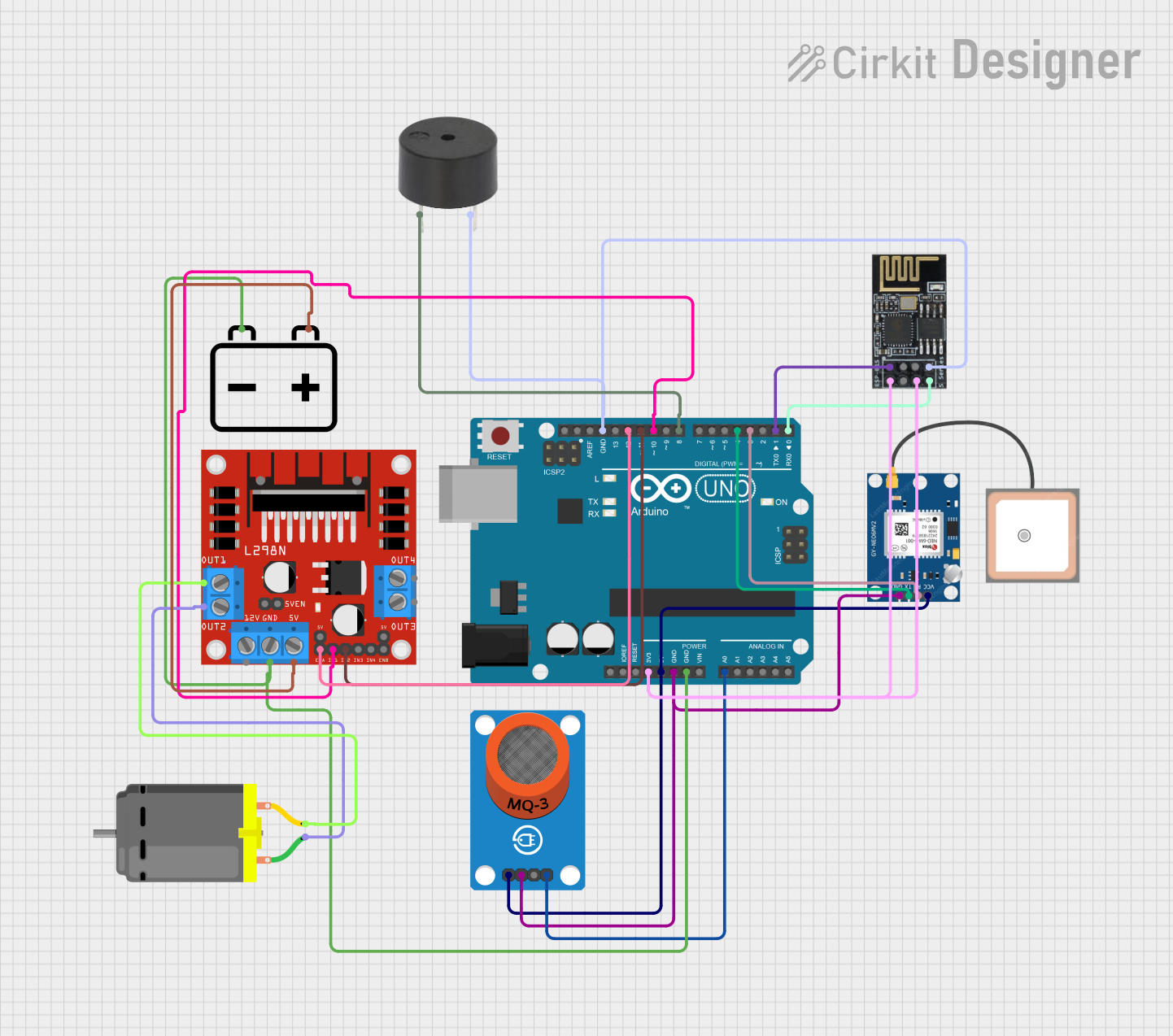
This circuit integrates an Arduino UNO microcontroller with various sensors and modules to create a system capable of detecting alcohol levels, obtaining GPS coordinates, and transmitting data via a Wi-Fi module. The system also includes a motor driver to control a DC motor and a buzzer for alerts.
Component List
Arduino UNO
- Description: Microcontroller board based on the ATmega328P.
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
MQ-3 Breakout
- Description: Alcohol sensor module.
- Pins: VCC, GND, DO, AO
GPS NEO 6M
- Description: GPS module for obtaining location data.
- Pins: VCC, RX, TX, GND
L298N DC Motor Driver
- Description: Dual H-Bridge motor driver for controlling DC motors.
- Pins: OUT1, OUT2, 12V, GND, 5V, OUT3, OUT4, 5V-ENA-JMP-I, 5V-ENA-JMP-O, +5V-J1, +5V-J2, ENA, IN1, IN2, IN3, IN4, ENB
12V Battery
- Description: Power source for the motor driver.
- Pins: -, +
DC Motor
- Description: Motor to be controlled by the motor driver.
- Pins: pin 1, pin 2
Buzzer
- Description: Audio alert component.
- Pins: PIN, GND
Wi-Fi Module ESP8266-01
- Description: Wi-Fi module for data transmission.
- Pins: RX, GPIO0, GPIO2, GND, +3V3, Reset, CH-PD Chip power down, TX
Wiring Details
Arduino UNO
- 3.3V connected to +3V3 and CH-PD Chip power down of the Wi-Fi module ESP8266-01.
- 5V connected to VCC of the GPS NEO 6M and VCC of the MQ-3 Breakout.
- GND connected to GND of the GPS NEO 6M, GND of the MQ-3 Breakout, GND of the L298N DC motor driver, GND of the buzzer, and GND of the Wi-Fi module ESP8266-01.
- A0 connected to AO of the MQ-3 Breakout.
- D12 connected to ENA of the L298N DC motor driver.
- D11 connected to IN2 of the L298N DC motor driver.
- D10 connected to IN1 of the L298N DC motor driver.
- D8 connected to PIN of the buzzer.
- D4 connected to TX of the GPS NEO 6M.
- D3 connected to RX of the GPS NEO 6M.
- D1 connected to RX of the Wi-Fi module ESP8266-01.
- D0 connected to TX of the Wi-Fi module ESP8266-01.
MQ-3 Breakout
- VCC connected to 5V of the Arduino UNO.
- GND connected to GND of the Arduino UNO.
- AO connected to A0 of the Arduino UNO.
GPS NEO 6M
- VCC connected to 5V of the Arduino UNO.
- GND connected to GND of the Arduino UNO.
- TX connected to D4 of the Arduino UNO.
- RX connected to D3 of the Arduino UNO.
L298N DC Motor Driver
- GND connected to GND of the Arduino UNO and - of the 12V Battery.
- ENA connected to D12 of the Arduino UNO.
- IN2 connected to D11 of the Arduino UNO.
- IN1 connected to D10 of the Arduino UNO.
- OUT1 connected to pin 2 of the DC Motor.
- OUT2 connected to pin 1 of the DC Motor.
- 5V connected to + of the 12V Battery.
12V Battery
- - connected to GND of the L298N DC motor driver.
- + connected to 5V of the L298N DC motor driver.
DC Motor
- pin 1 connected to OUT2 of the L298N DC motor driver.
- pin 2 connected to OUT1 of the L298N DC motor driver.
Buzzer
- PIN connected to D8 of the Arduino UNO.
- GND connected to GND of the Arduino UNO.
Wi-Fi Module ESP8266-01
- +3V3 connected to 3.3V of the Arduino UNO.
- CH-PD Chip power down connected to 3.3V of the Arduino UNO.
- GND connected to GND of the Arduino UNO.
- RX connected to D1 of the Arduino UNO.
- TX connected to D0 of the Arduino UNO.
Documented Code
#include <SoftwareSerial.h>
// Define pins for modules and components
#define MQ3_PIN A0 // MQ-3 sensor analog pin
#define BUZZER_PIN 8 // Buzzer pin
#define IN1 2 // L298N Motor Driver IN1
#define IN2 3 // L298N Motor Driver IN2
#define ENA 9 // L298N Motor Driver ENA
#define WIFI_TX 10 // ESP8266 TX pin
#define WIFI_RX 11 // ESP8266 RX pin
#define GPS_RX 4 // GPS RX pin
#define GPS_TX 5 // GPS TX pin
// Threshold for alcohol detection
#define ALCOHOL_THRESHOLD 300
// SoftwareSerial for Wi-Fi and GPS modules
SoftwareSerial esp8266(WIFI_RX, WIFI_TX);
SoftwareSerial gpsSerial(GPS_RX, GPS_TX);
void setup() {
// Serial communication for debugging
Serial.begin(9600);
esp8266.begin(9600);
gpsSerial.begin(9600);
// Setup pins
pinMode(BUZZER_PIN, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
// Initialize motor and buzzer
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(ENA, 0); // Motor off
digitalWrite(BUZZER_PIN, LOW);
Serial.println("System initialized!");
}
void loop() {
// Alcohol level reading
int alcoholLevel = analogRead(MQ3_PIN);
Serial.print("Alcohol Level: ");
Serial.println(alcoholLevel);
// Read GPS data
String gpsData = readGPSData();
if (gpsData.length() > 0) {
Serial.println("Raw GPS Data: " + gpsData);
double latitude, longitude;
if (parseGPS(gpsData, latitude, longitude)) {
Serial.print("Latitude: ");
Serial.println(latitude, 6);
Serial.print("Longitude: ");
Serial.println(longitude, 6);
// Send GPS data via ESP8266
sendToServer(alcoholLevel, latitude, longitude);
}
}
// Activate buzzer and stop motor if alcohol is detected
if (alcoholLevel > ALCOHOL_THRESHOLD) {
Serial.println("Alcohol detected! Stopping motor and activating buzzer.");
digitalWrite(BUZZER_PIN, HIGH);
stopMotor();
} else {
digitalWrite(BUZZER_PIN, LOW);
runMotor();
}
delay(1000);
}
String readGPSData() {
String data = "";
while (gpsSerial.available() > 0) {
char c = gpsSerial.read();
if (c == '$') { // Start of NMEA sentence
data = "";
}
data += c;
if (c == '\n') { // End of NMEA sentence
if (data.startsWith("$GPRMC")) { // RMC sentence contains position info
return data;
}
}
}
return "";
}
bool parseGPS(String gpsData, double &latitude, double &longitude) {
int commaIndex[12];
int index = 0;
// Find all comma positions in the NMEA sentence
for