Cirkit Designer
Your all-in-one circuit design IDE
Home /
Project Documentation
Arduino-Based Fall Detection and Heart Rate Monitoring System with MPU-6050 and Pulse Sensor
Circuit Documentation
Summary
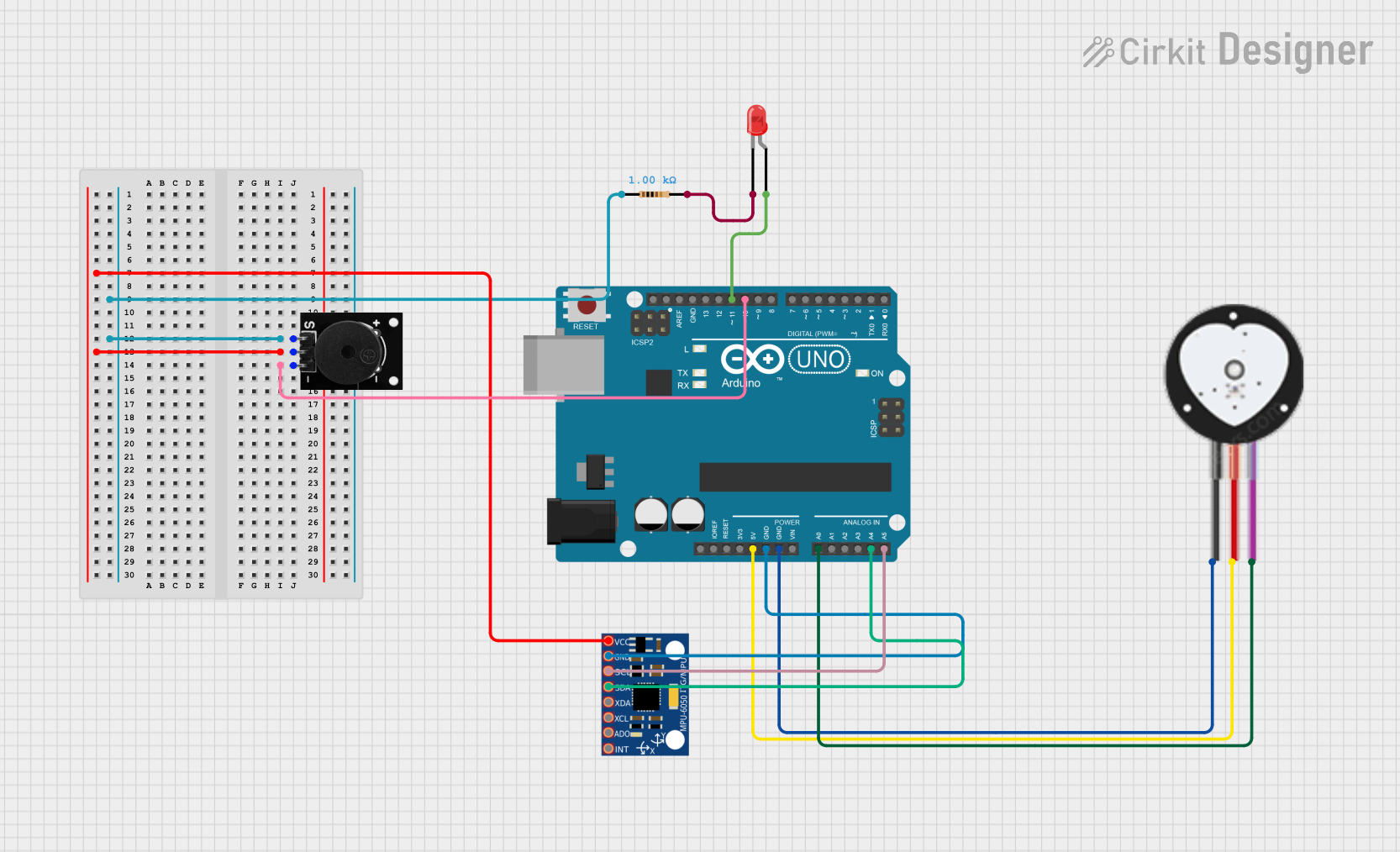
This circuit is designed to monitor heart rate and detect falls using an MPU-6050 accelerometer, a heart pulse sensor, and an Arduino UNO. The circuit also includes a passive buzzer and an LED to provide alerts based on the sensor readings.
Component List
Heart Pulse Sensor
- Pins: GND, VCC, SIGNAL
- Description: Measures the heart rate.
- Purpose in Circuit: Provides heart rate data to the Arduino.
Resistor
- Pins: pin1, pin2
- Description: 1000 Ohms resistor.
- Purpose in Circuit: Limits current to the LED.
Arduino UNO
- Pins: UNUSED, IOREF, Reset, 3.3V, 5V, GND, Vin, A0, A1, A2, A3, A4, A5, SCL, SDA, AREF, D13, D12, D11, D10, D9, D8, D7, D6, D5, D4, D3, D2, D1, D0
- Description: Microcontroller board.
- Purpose in Circuit: Central processing unit for the circuit, reads sensor data and controls the buzzer and LED.
LED: Two Pin (red)
- Pins: cathode, anode
- Description: Red LED.
- Purpose in Circuit: Provides visual alerts.
MPU-6050
- Pins: VCC, GND, SCL, SDA, XDA, XCL, AD0, INT
- Description: Accelerometer and gyroscope sensor.
- Purpose in Circuit: Detects falls by measuring acceleration.
Passive Buzzer
- Pins: S output signal, +VCC, GND
- Description: Emits sound when activated.
- Purpose in Circuit: Provides audible alerts.
Wiring Details
Heart Pulse Sensor
- GND connected to Arduino UNO GND
- VCC connected to Arduino UNO 5V
- SIGNAL connected to Arduino UNO A0
Resistor
- pin1 connected to Passive Buzzer S output signal
- pin2 connected to LED: Two Pin (red) cathode
Arduino UNO
- 5V connected to Heart Pulse Sensor VCC
- GND connected to MPU-6050 GND
- GND connected to Heart Pulse Sensor GND
- A0 connected to Heart Pulse Sensor SIGNAL
- A4 connected to MPU-6050 SDA
- A5 connected to MPU-6050 SCL
- D10 connected to Passive Buzzer GND
- D11 connected to LED: Two Pin (red) anode
LED: Two Pin (red)
- anode connected to Arduino UNO D11
- cathode connected to Resistor pin2
MPU-6050
- VCC connected to Passive Buzzer +VCC
- GND connected to Arduino UNO GND
- SDA connected to Arduino UNO A4
- SCL connected to Arduino UNO A5
Passive Buzzer
- S output signal connected to Resistor pin1
- +VCC connected to MPU-6050 VCC
- GND connected to Arduino UNO D10
Code Documentation
Arduino UNO Code
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
const float FALL_THRESHOLD = 2.5; // 낙상 감지를 위한 가속도 임계값
const int buzzerPin = 10; // 부저 핀
const int ledPin = 9; // LED 핀
const int heartSensorPin = A0; // 심박 센서 핀
const int volume = 1; // 부저 볼륨(PWM 값)
const int heartRateThreshold = 60; // 심박수 임계값 (예시: 60 BPM)
unsigned long lastFallTime = 0; // 마지막 낙상 감지 시간
const unsigned long debounceTime = 2000; // 낙상 감지 후 2초 동안 새로운 감지 방지
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
pinMode(buzzerPin, OUTPUT);
pinMode(ledPin, OUTPUT);
pinMode(heartSensorPin, INPUT);
if (!mpu.testConnection()) {
Serial.println("MPU6050 연결 실패");
while (1);
}
}
void loop() {
// 센서 데이터 읽기
int16_t ax, ay, az;
mpu.getAcceleration(&ax, &ay, &az);
// 가속도를 m/s²로 변환 (1g ≈ 9.81m/s²)
float accelX = ax / 16384.0 * 9.81;
float accelY = ay / 16384.0 * 9.81;
float accelZ = az / 16384.0 * 9.81;
// 현재 시간
unsigned long currentTime = millis();
// 낙상 감지
if (accelZ < FALL_THRESHOLD && (accelX > 1 || accelY > 1)) {
if (currentTime - lastFallTime > debounceTime) { // debounce time 체크
Serial.println("낙상 감지!");
// LED 켜기
digitalWrite(ledPin, HIGH);
delay(500); // 0.5초 동안 LED 켜기
digitalWrite(ledPin, LOW); // LED 끄기
// 부저 낮은 소리로 켜기
analogWrite(buzzerPin, volume);
delay(1000); // 1초 동안 부저 울리기
analogWrite(buzzerPin, 0); // 부저 끄기
lastFallTime = currentTime; // 마지막 낙상 감지 시간 갱신
}
}
// 심박수 측정
int heartSignal = analogRead(heartSensorPin);
float heartRate = map(heartSignal, 0, 1023, 0, 200); // 예시 맵핑 (센서에 따라 다를 수 있음)
// 심박수 출력
Serial.print("Heart Rate: ");
Serial.print(heartRate);
Serial.println(" BPM");
// 심박수가 임계값 이하일 때 경고
if (heartRate < heartRateThreshold) {
Serial.println("심박수 낮음 경고!");
digitalWrite(ledPin, HIGH); // LED 켜기
analogWrite(buzzerPin, volume); // 부저 낮은 소리로 울리기
delay(1000); // 1초 동안 울리기
digitalWrite(ledPin, LOW); // LED 끄기
analogWrite(buzzerPin, 0); // 부저 끄기
}
// 가속도 값 출력 (디버깅용)
Serial.print("Accel X: ");
Serial.print(accelX);
Serial.print(" | Accel Y: ");
Serial.print(accelY);
Serial.print(" | Accel Z: ");
Serial.println(accelZ);
delay(500); // 체크 주기 (0.5초)
}
MPU-6050 Code
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
Documentation File
This file is empty and serves as a placeholder for additional documentation if needed.