How to Use L298N Motor Driver - Robo: Examples, Pinouts, and Specs
Introduction
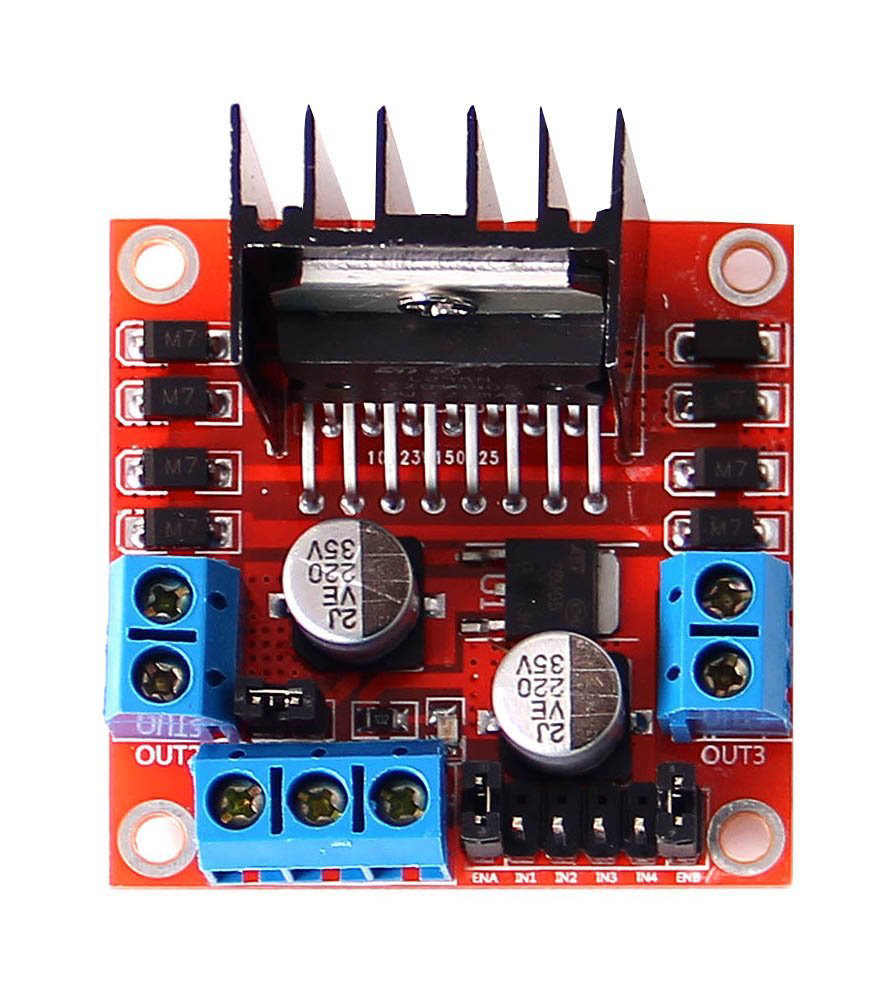
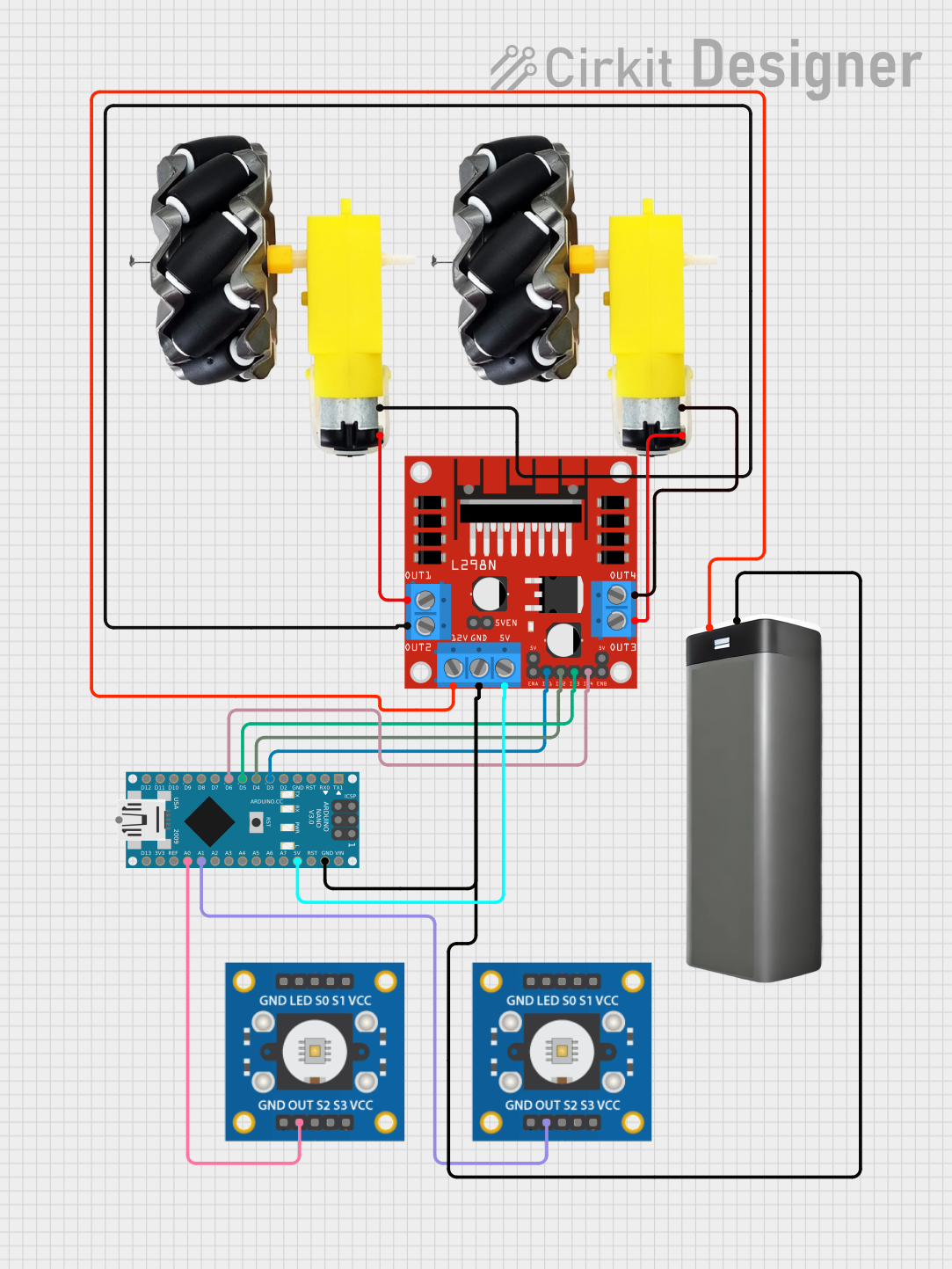
The L298N Motor Driver, manufactured by Arduino (Part ID: L298N), is a dual H-bridge motor driver designed to control two DC motors or one stepper motor. It supports motor voltage ranges from 5V to 35V and can handle up to 2A per channel, making it ideal for robotics and automation projects. The L298N allows for precise control of motor speed and direction, making it a popular choice for hobbyists and professionals alike.
Explore Projects Built with L298N Motor Driver - Robo
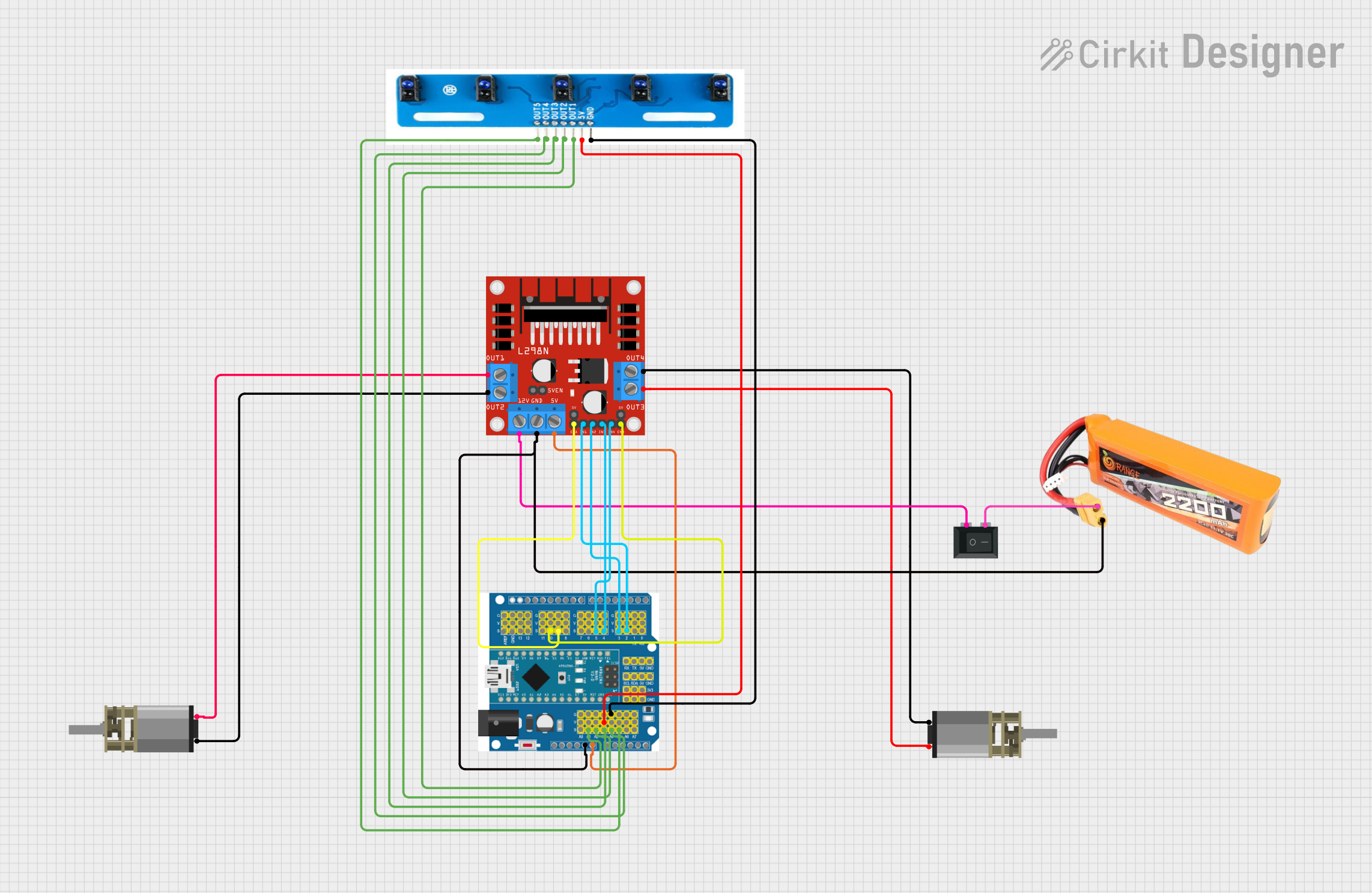
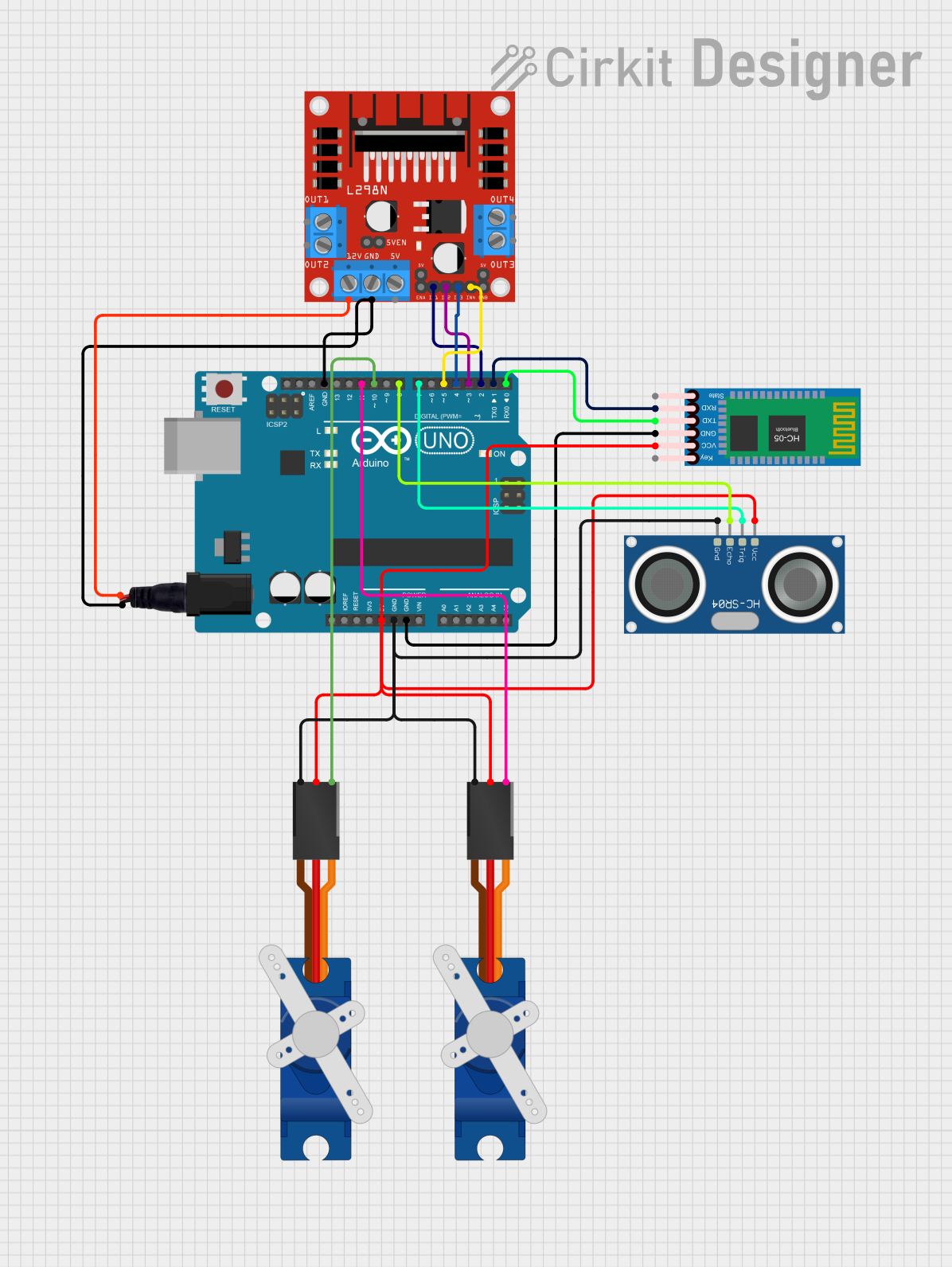
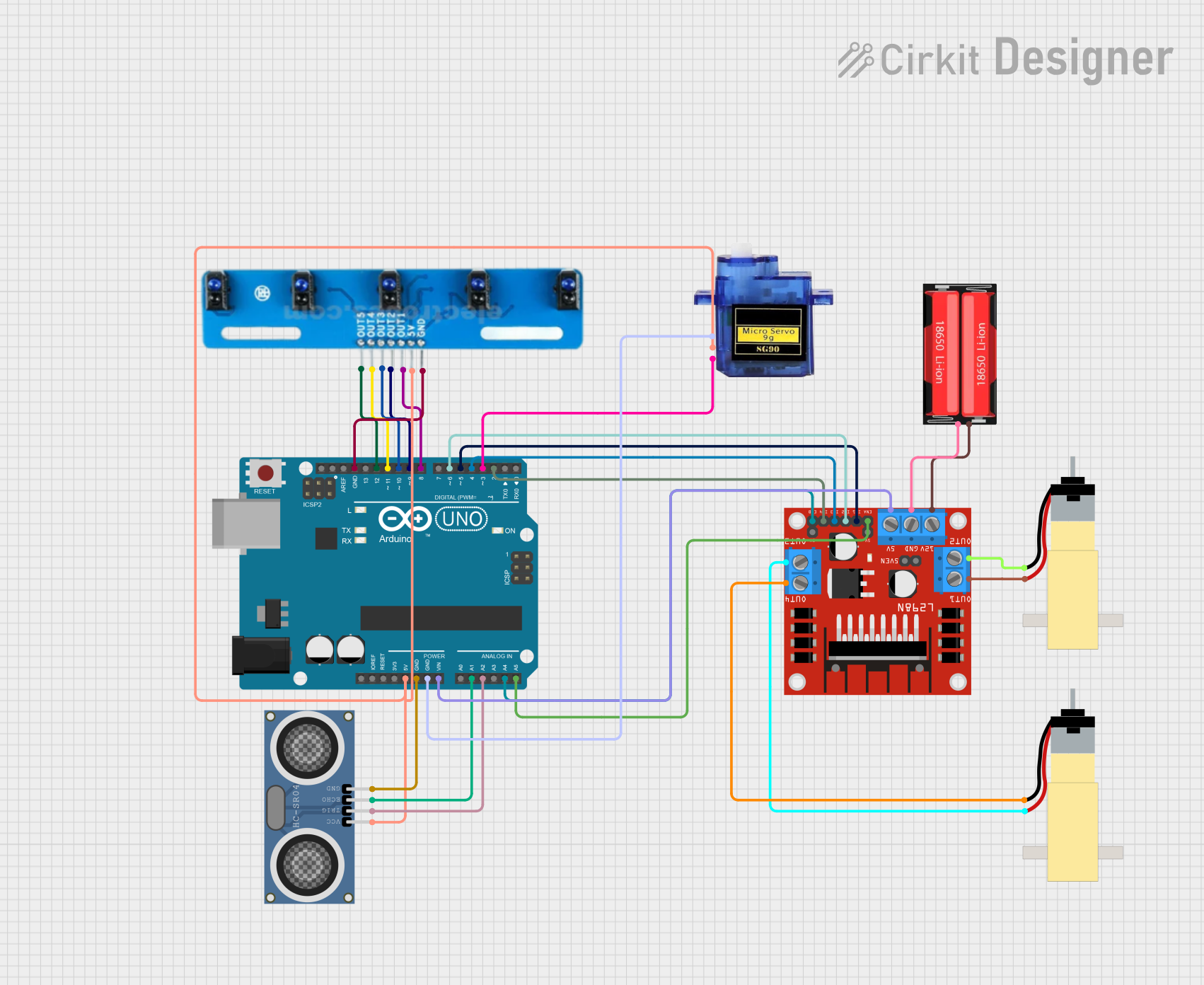
Explore Projects Built with L298N Motor Driver - Robo
Common Applications and Use Cases
- Robotics: Controlling wheels or tracks in mobile robots.
- Automation: Driving conveyor belts or actuators.
- DIY Projects: Building RC cars, robotic arms, or CNC machines.
- Educational Purposes: Learning motor control and H-bridge concepts.
Technical Specifications
Below are the key technical details of the L298N Motor Driver:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V to 35V |
| Output Current | Up to 2A per channel |
| Logic Voltage | 5V |
| Control Logic Levels | High: 2.3V to 5V, Low: 0V |
| Number of Channels | 2 (dual H-bridge) |
| Power Dissipation | 25W (with proper heat sink) |
| Dimensions | 43mm x 43mm x 27mm |
Pin Configuration and Descriptions
The L298N module has several pins and terminals for motor control and power input. Below is a detailed description:
Power and Motor Terminals
| Pin/Terminal | Description |
|---|---|
| VCC | Motor power supply (5V to 35V). |
| GND | Ground connection. |
| 5V | Logic power supply (optional, if not using onboard regulator). |
| OUT1, OUT2 | Outputs for Motor A. |
| OUT3, OUT4 | Outputs for Motor B. |
Control Pins
| Pin | Description |
|---|---|
| ENA | Enable pin for Motor A (PWM input for speed control). |
| ENB | Enable pin for Motor B (PWM input for speed control). |
| IN1, IN2 | Control pins for Motor A direction. |
| IN3, IN4 | Control pins for Motor B direction. |
Usage Instructions
How to Use the L298N in a Circuit
Power Connections:
- Connect the motor power supply to the VCC terminal (5V to 35V).
- Connect the ground of the power supply to the GND terminal.
- If using the onboard 5V regulator, the 5V pin can be used to power the logic circuit.
Motor Connections:
- Connect the terminals of Motor A to OUT1 and OUT2.
- Connect the terminals of Motor B to OUT3 and OUT4.
Control Connections:
- Connect the ENA and ENB pins to PWM-capable pins on your microcontroller for speed control.
- Connect IN1, IN2, IN3, and IN4 to digital pins on your microcontroller for direction control.
Logic Power:
- If the motor power supply is greater than 12V, do not use the onboard 5V regulator to power the logic circuit. Instead, provide a separate 5V supply to the 5V pin.
Arduino UNO Example Code
Below is an example code to control two DC motors using the L298N Motor Driver with an Arduino UNO:
// Define control pins for Motor A
const int ENA = 9; // PWM pin for speed control
const int IN1 = 8; // Direction control pin 1
const int IN2 = 7; // Direction control pin 2
// Define control pins for Motor B
const int ENB = 10; // PWM pin for speed control
const int IN3 = 6; // Direction control pin 1
const int IN4 = 5; // Direction control pin 2
void setup() {
// Set motor control pins as outputs
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// Motor A: Forward at 50% speed
digitalWrite(IN1, HIGH); // Set IN1 high
digitalWrite(IN2, LOW); // Set IN2 low
analogWrite(ENA, 128); // Set speed (0-255)
// Motor B: Backward at 75% speed
digitalWrite(IN3, LOW); // Set IN3 low
digitalWrite(IN4, HIGH); // Set IN4 high
analogWrite(ENB, 192); // Set speed (0-255)
delay(2000); // Run motors for 2 seconds
// Stop both motors
analogWrite(ENA, 0); // Stop Motor A
analogWrite(ENB, 0); // Stop Motor B
delay(2000); // Wait for 2 seconds
}
Important Considerations and Best Practices
- Use a heat sink on the L298N module if driving motors with high current to prevent overheating.
- Ensure the motor power supply voltage matches the motor's rated voltage.
- Avoid exceeding the 2A current limit per channel to prevent damage to the driver.
- Use proper decoupling capacitors on the power supply to reduce noise.
Troubleshooting and FAQs
Common Issues and Solutions
Motors Not Running:
- Check all power connections and ensure the motor power supply is within the specified range.
- Verify that the enable pins (ENA and ENB) are receiving a PWM signal.
Motors Running in the Wrong Direction:
- Swap the connections of IN1 and IN2 (or IN3 and IN4) to reverse the motor direction.
Overheating:
- Attach a heat sink to the L298N module.
- Reduce the motor load or current draw.
No Output Voltage on Motor Terminals:
- Ensure the control pins (IN1, IN2, IN3, IN4) are correctly configured in the code.
- Check for loose connections or damaged wires.
FAQs
Q: Can the L298N drive stepper motors?
A: Yes, the L298N can drive a bipolar stepper motor by controlling the two H-bridges. However, additional code is required to generate the step sequence.
Q: Can I use the onboard 5V regulator to power my Arduino?
A: Yes, but only if the motor power supply is between 7V and 12V. For higher voltages, use a separate 5V power supply for the Arduino.
Q: What is the maximum PWM frequency supported?
A: The L298N typically supports PWM frequencies up to 20 kHz.
Q: Can I control more than two motors with one L298N?
A: No, the L298N is designed to control up to two DC motors or one stepper motor. For more motors, additional drivers are required.