How to Use Flight Controller : Examples, Pinouts, and Specs
Introduction
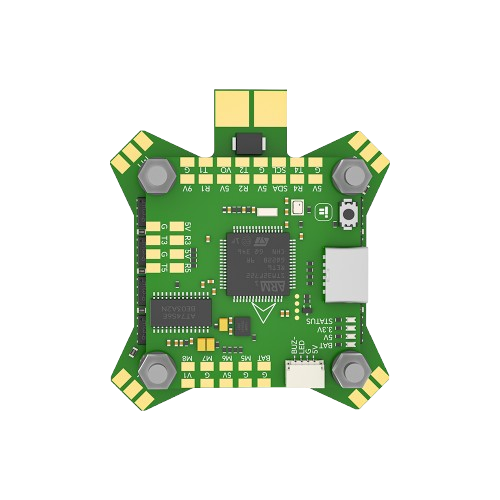
The iFlight Blitz F435 Flight Controller is a high-performance electronic device designed to manage the flight dynamics of drones and other unmanned aerial vehicles (UAVs). It processes data from various onboard sensors, such as gyroscopes, accelerometers, and barometers, to stabilize and control the vehicle's movements. This flight controller is particularly suited for FPV (First Person View) drones, offering advanced features for smooth and precise flight.
Explore Projects Built with Flight Controller



Explore Projects Built with Flight Controller
Common Applications and Use Cases
- FPV racing drones
- Aerial photography and videography drones
- Autonomous UAVs for research and development
- Hobbyist and professional drone builds
- Educational projects involving flight dynamics and control systems
Technical Specifications
The iFlight Blitz F435 Flight Controller is equipped with cutting-edge hardware to ensure reliable and efficient performance. Below are the key technical details:
General Specifications
- Processor: STM32F4 series microcontroller
- IMU (Inertial Measurement Unit): MPU6000 (6-axis gyro and accelerometer)
- Input Voltage: 2S–6S LiPo (7.4V–25.2V)
- BEC Output: 5V @ 2.5A, 9V @ 2.5A
- UART Ports: 5 UARTs for peripherals (e.g., GPS, telemetry, receiver)
- Flash Memory: 16MB for Blackbox logging
- Firmware: Betaflight-compatible
- Dimensions: 36mm x 36mm (30.5mm x 30.5mm mounting holes)
- Weight: 7.5g
Pin Configuration and Descriptions
The Blitz F435 Flight Controller features a well-labeled pinout for easy integration into your drone build. Below is the pin configuration:
| Pin Name | Description |
|---|---|
| GND | Ground connection for power and signal reference |
| VBAT | Battery voltage input (2S–6S LiPo) |
| 5V | 5V power output for peripherals |
| 9V | 9V power output for peripherals |
| RX1, TX1 | UART1 for receiver or telemetry modules |
| RX2, TX2 | UART2 for GPS or other peripherals |
| RX3, TX3 | UART3 for additional peripherals |
| RX4, TX4 | UART4 for additional peripherals |
| RX5, TX5 | UART5 for additional peripherals |
| SCL, SDA | I2C interface for external sensors |
| M1–M4 | Motor outputs for ESCs (Electronic Speed Controllers) |
| LED | Addressable LED signal output |
| Buzzer | Buzzer signal output for audible alerts |
| RSSI | Analog RSSI input for signal strength monitoring |
| Current | Current sensor input for monitoring power consumption |
| Boot | Bootloader mode activation for firmware updates |
Usage Instructions
How to Use the Blitz F435 in a Circuit
- Power Connection: Connect the VBAT pin to your drone's battery (2S–6S LiPo). Ensure the polarity is correct to avoid damage.
- Motor Connection: Connect the ESC signal wires to the M1–M4 pins. Match the motor order as specified in Betaflight.
- Receiver Connection: Connect your receiver to one of the UART ports (e.g., RX1/TX1). Configure the protocol in Betaflight (e.g., SBUS, DSMX).
- Peripheral Connection: Attach additional peripherals like GPS, telemetry modules, or LEDs to the appropriate UART or signal pins.
- Firmware Setup: Flash the latest Betaflight firmware using the Betaflight Configurator. Configure the flight controller settings, including PID tuning, motor mapping, and receiver setup.
- Calibration: Calibrate the accelerometer and other sensors in Betaflight Configurator to ensure accurate flight dynamics.
Important Considerations and Best Practices
- Voltage Compatibility: Ensure your battery voltage is within the supported range (7.4V–25.2V).
- Heat Management: Avoid overheating by ensuring proper airflow around the flight controller.
- Firmware Updates: Regularly update the firmware to access new features and bug fixes.
- Wiring: Double-check all connections to prevent short circuits or incorrect wiring.
- Blackbox Logging: Use the onboard 16MB flash memory for flight data logging to analyze and improve performance.
Example Code for Arduino UNO Integration
While the Blitz F435 is not typically used with an Arduino UNO, you can use an Arduino to simulate sensor data or communicate with the flight controller via UART. Below is an example of sending data to the flight controller:
#include <SoftwareSerial.h>
// Define RX and TX pins for UART communication
SoftwareSerial mySerial(10, 11); // RX = pin 10, TX = pin 11
void setup() {
// Initialize serial communication
Serial.begin(9600); // Monitor communication
mySerial.begin(115200); // UART communication with flight controller
Serial.println("Arduino to Flight Controller Communication Initialized");
}
void loop() {
// Example: Send a test message to the flight controller
mySerial.println("Hello, Flight Controller!");
// Check for incoming data from the flight controller
if (mySerial.available()) {
String data = mySerial.readString();
Serial.println("Received from FC: " + data);
}
delay(1000); // Wait 1 second before sending the next message
}
Troubleshooting and FAQs
Common Issues and Solutions
Flight Controller Not Powering On
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Verify the VBAT connection and ensure the battery voltage is within the supported range.
Motors Not Spinning
- Cause: Incorrect motor mapping or ESC configuration.
- Solution: Check motor order and ESC protocol settings in Betaflight Configurator.
No Receiver Signal
- Cause: Improper receiver connection or protocol mismatch.
- Solution: Ensure the receiver is connected to the correct UART port and the protocol is configured correctly in Betaflight.
Unstable Flight
- Cause: Incorrect PID tuning or sensor calibration.
- Solution: Recalibrate the sensors and adjust PID settings in Betaflight Configurator.
Firmware Update Fails
- Cause: Incorrect bootloader mode or USB connection issue.
- Solution: Hold the Boot button while connecting the flight controller to your computer and retry the firmware update.
FAQs
Q: Can I use the Blitz F435 with iNav firmware?
- A: Yes, the Blitz F435 is compatible with iNav firmware for advanced navigation features.
Q: What is the maximum supported LiPo cell count?
- A: The Blitz F435 supports up to 6S LiPo batteries (25.2V).
Q: How do I connect an external barometer?
- A: Use the I2C pins (SCL and SDA) to connect the external barometer and configure it in Betaflight.
Q: Can I use this flight controller for fixed-wing aircraft?
- A: Yes, the Blitz F435 can be configured for fixed-wing aircraft in Betaflight or iNav.
This documentation provides a comprehensive guide to using the iFlight Blitz F435 Flight Controller effectively. For further assistance, refer to the manufacturer's resources or community forums.