How to Use driver droite: Examples, Pinouts, and Specs
Introduction
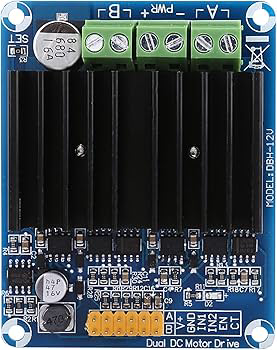
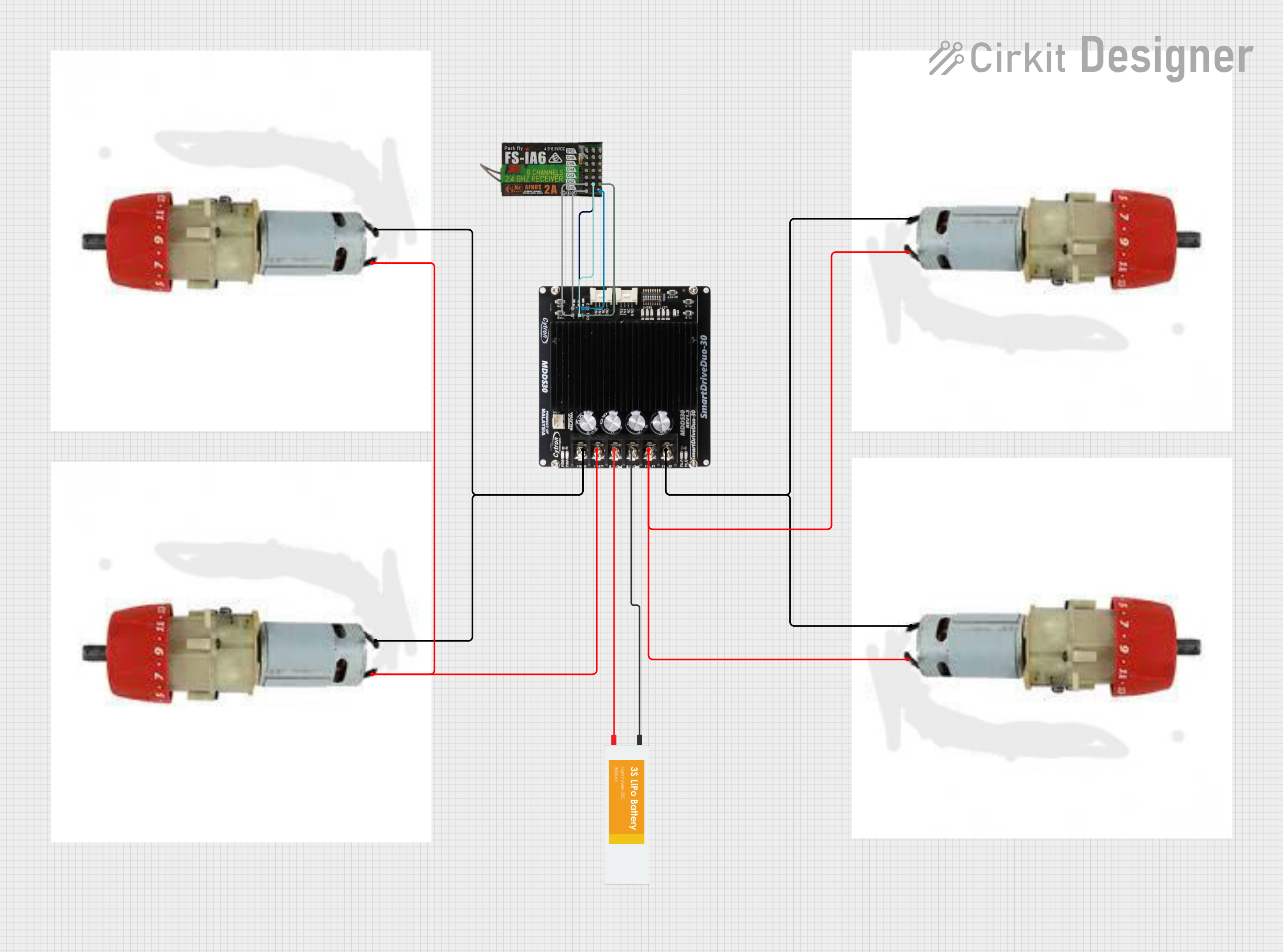
A driver droite is a type of electronic component designed to control the direction of current flow in a circuit. It is commonly used in applications requiring precise control of motors or actuators, such as robotics, automated systems, and industrial machinery. By enabling bidirectional current flow, the driver droite allows for the control of motor direction, making it an essential component in motor driver circuits.
Explore Projects Built with driver droite
Explore Projects Built with driver droite
Common Applications:
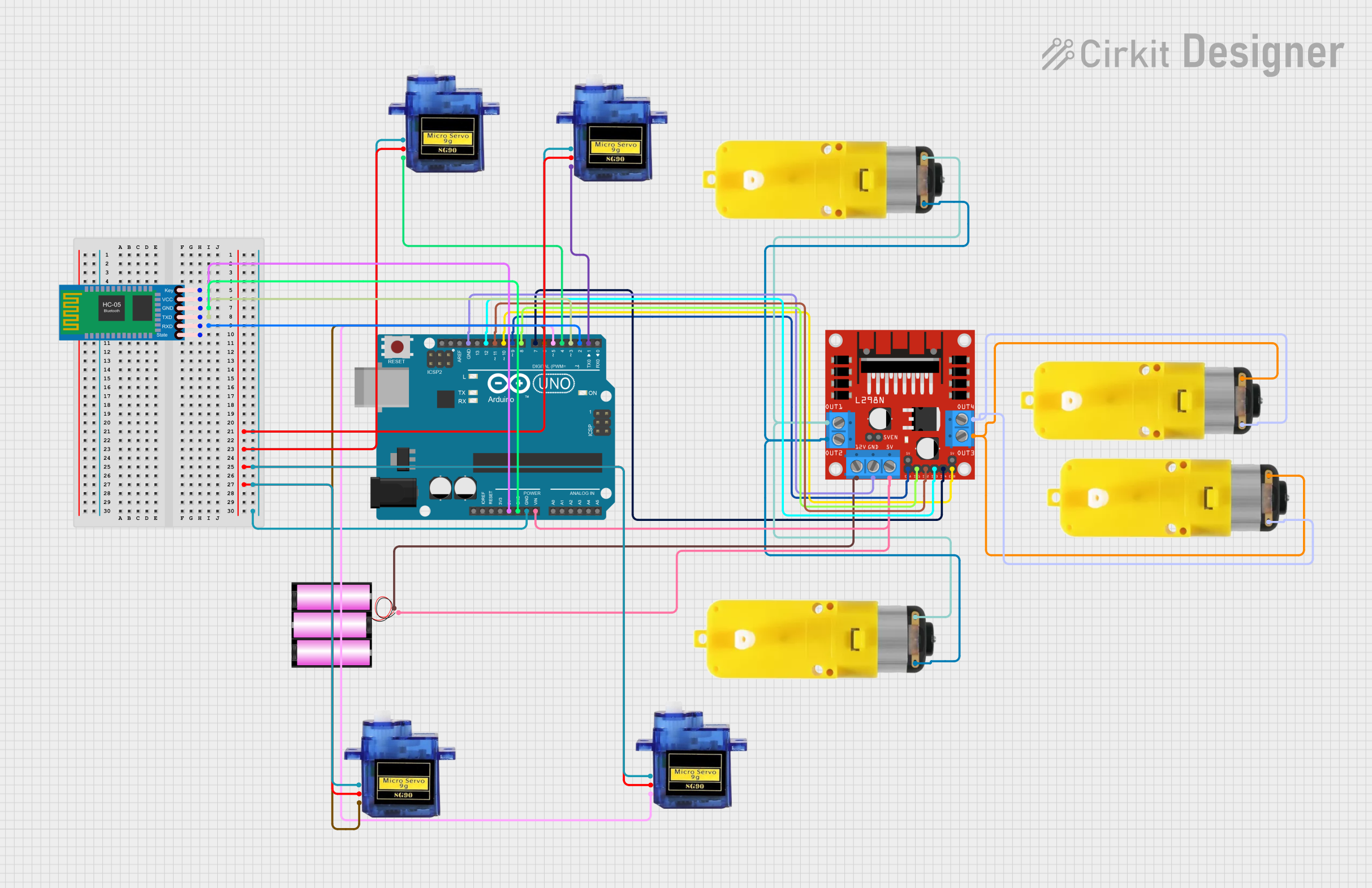
- DC motor control in robotics
- Actuator control in industrial automation
- Bidirectional current flow management in power systems
- Motorized systems requiring forward and reverse motion
Technical Specifications
Below are the key technical details of a typical driver droite:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V to 36V |
| Maximum Output Current | 2A per channel |
| Control Logic Voltage | 3.3V or 5V (logic-level compatible) |
| PWM Frequency | Up to 20 kHz |
| Thermal Protection | Yes |
| Direction Control Pins | 2 (IN1, IN2) |
| Enable Pin | 1 (EN) |
Pin Configuration and Descriptions
The driver droite typically has the following pin configuration:
| Pin Name | Description |
|---|---|
| VCC | Power supply input for the driver (5V to 36V). |
| GND | Ground connection. |
| IN1 | Input pin to control the direction of current flow (logic HIGH or LOW). |
| IN2 | Input pin to control the opposite direction of current flow (logic HIGH or LOW). |
| EN | Enable pin to activate the driver (logic HIGH to enable, LOW to disable). |
| OUT1 | Output pin connected to one terminal of the motor or load. |
| OUT2 | Output pin connected to the other terminal of the motor or load. |
Usage Instructions
How to Use the Driver Droite in a Circuit
- Power Supply: Connect the VCC pin to a power source within the operating voltage range (e.g., 12V for a DC motor). Connect the GND pin to the ground of the circuit.
- Motor Connection: Connect the motor terminals to the OUT1 and OUT2 pins.
- Control Pins:
- Use IN1 and IN2 to control the direction of the motor:
- IN1 HIGH and IN2 LOW: Motor rotates in one direction.
- IN1 LOW and IN2 HIGH: Motor rotates in the opposite direction.
- Both LOW: Motor stops.
- Use the EN pin to enable or disable the driver.
- Use IN1 and IN2 to control the direction of the motor:
- PWM Control: To control motor speed, apply a PWM signal to the EN pin.
Important Considerations
- Ensure the power supply voltage matches the motor's requirements and is within the driver's operating range.
- Use appropriate heat sinks or cooling mechanisms if operating at high currents to prevent overheating.
- Avoid short circuits between the output pins (OUT1 and OUT2) to prevent damage to the driver.
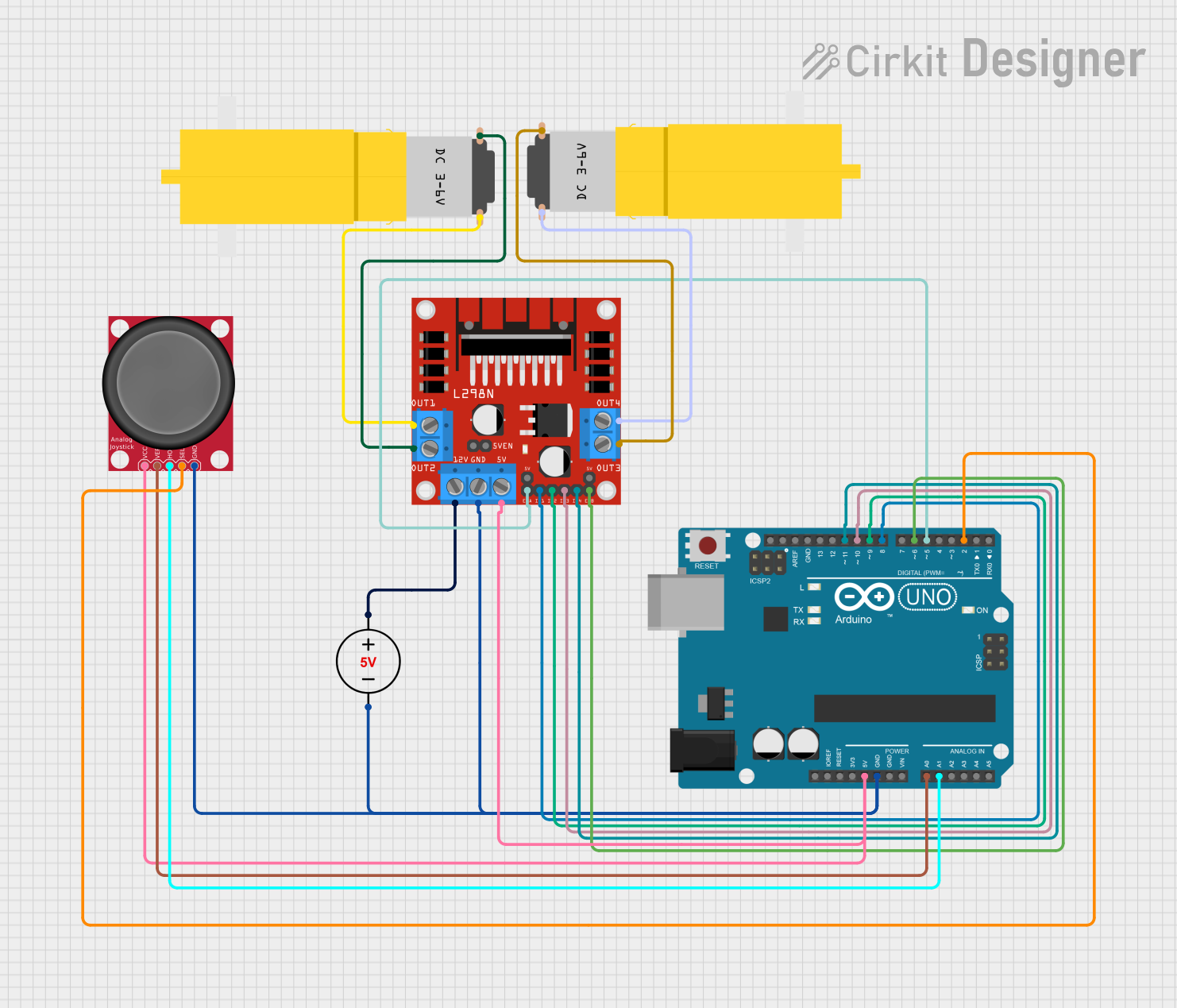
- If using with a microcontroller like Arduino, ensure the logic voltage levels are compatible.
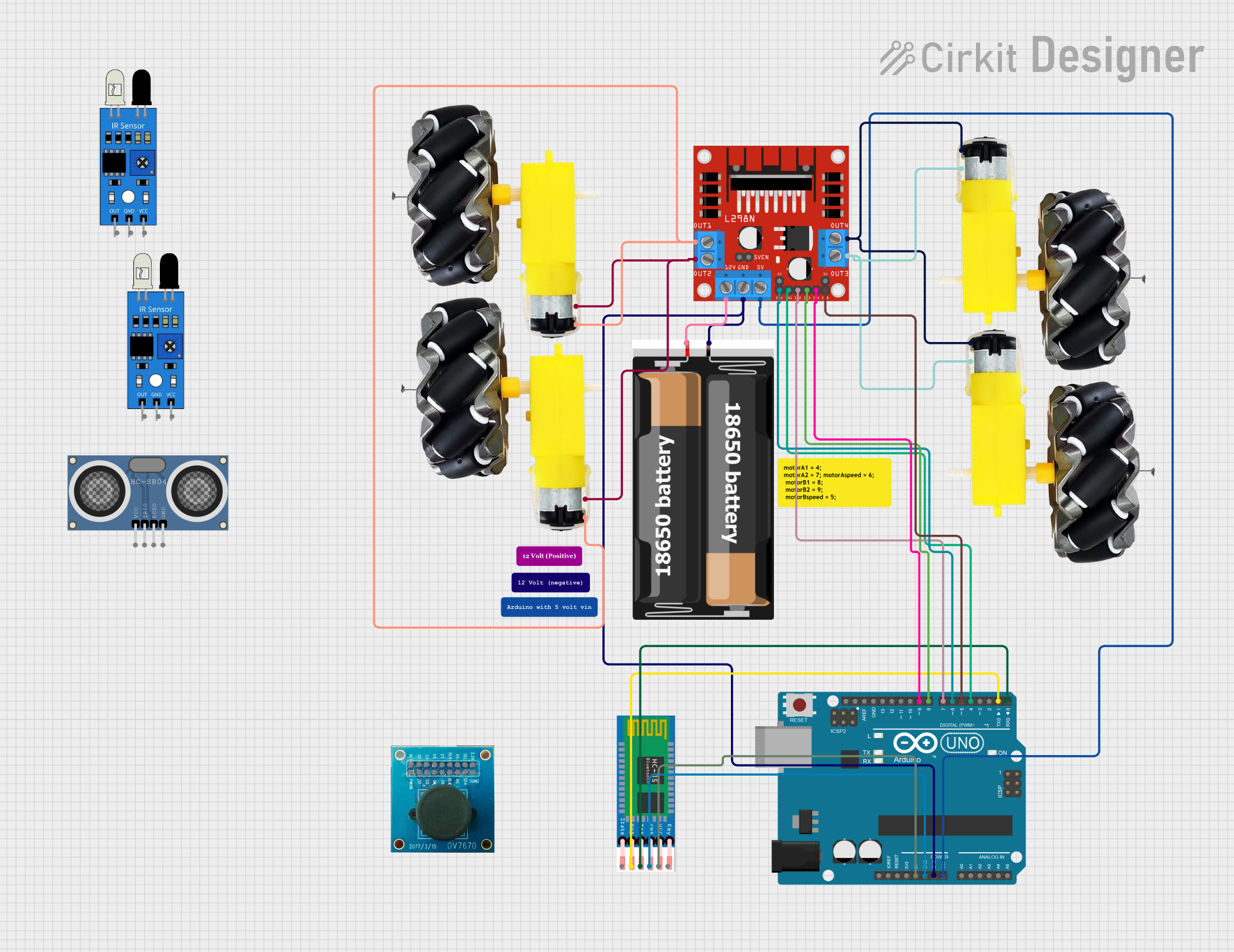
Example: Connecting to an Arduino UNO
Below is an example of how to control a motor using the driver droite and an Arduino UNO:
// Define pin connections for the driver droite
const int IN1 = 9; // IN1 pin connected to Arduino digital pin 9
const int IN2 = 10; // IN2 pin connected to Arduino digital pin 10
const int EN = 11; // EN pin connected to Arduino PWM pin 11
void setup() {
// Set the driver pins as outputs
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(EN, OUTPUT);
}
void loop() {
// Rotate motor in one direction
digitalWrite(IN1, HIGH); // Set IN1 HIGH
digitalWrite(IN2, LOW); // Set IN2 LOW
analogWrite(EN, 128); // Set motor speed to 50% (PWM value: 128)
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(IN1, LOW); // Set IN1 LOW
digitalWrite(IN2, LOW); // Set IN2 LOW
analogWrite(EN, 0); // Disable motor
delay(1000); // Wait for 1 second
// Rotate motor in the opposite direction
digitalWrite(IN1, LOW); // Set IN1 LOW
digitalWrite(IN2, HIGH); // Set IN2 HIGH
analogWrite(EN, 128); // Set motor speed to 50% (PWM value: 128)
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(IN1, LOW); // Set IN1 LOW
digitalWrite(IN2, LOW); // Set IN2 LOW
analogWrite(EN, 0); // Disable motor
delay(1000); // Wait for 1 second
}
Troubleshooting and FAQs
Common Issues
Motor Not Rotating:
- Check the power supply voltage and ensure it matches the motor's requirements.
- Verify the connections to the IN1, IN2, and EN pins.
- Ensure the EN pin is set HIGH or receiving a valid PWM signal.
Overheating:
- Ensure the driver is not exceeding its maximum current rating.
- Use a heat sink or cooling fan if necessary.
Motor Rotates in Only One Direction:
- Verify the logic levels on IN1 and IN2.
- Check for loose or incorrect wiring.
Arduino Not Controlling the Driver:
- Ensure the Arduino's logic voltage (3.3V or 5V) is compatible with the driver.
- Confirm that the Arduino pins are correctly configured as outputs.
FAQs
Q: Can I use the driver droite with a stepper motor?
A: No, the driver droite is designed for DC motors or actuators. For stepper motors, use a dedicated stepper motor driver.
Q: What happens if both IN1 and IN2 are HIGH?
A: This configuration typically results in a braking effect, where the motor stops abruptly.
Q: Can I control multiple motors with one driver droite?
A: No, a single driver droite is designed to control one motor. For multiple motors, use additional drivers.
Q: Is the driver droite compatible with Raspberry Pi?
A: Yes, as long as the logic voltage levels (3.3V) are compatible with the driver's control pins. Use level shifters if necessary.