How to Use 28BYJ-48 Stepper Motor: Examples, Pinouts, and Specs
Introduction
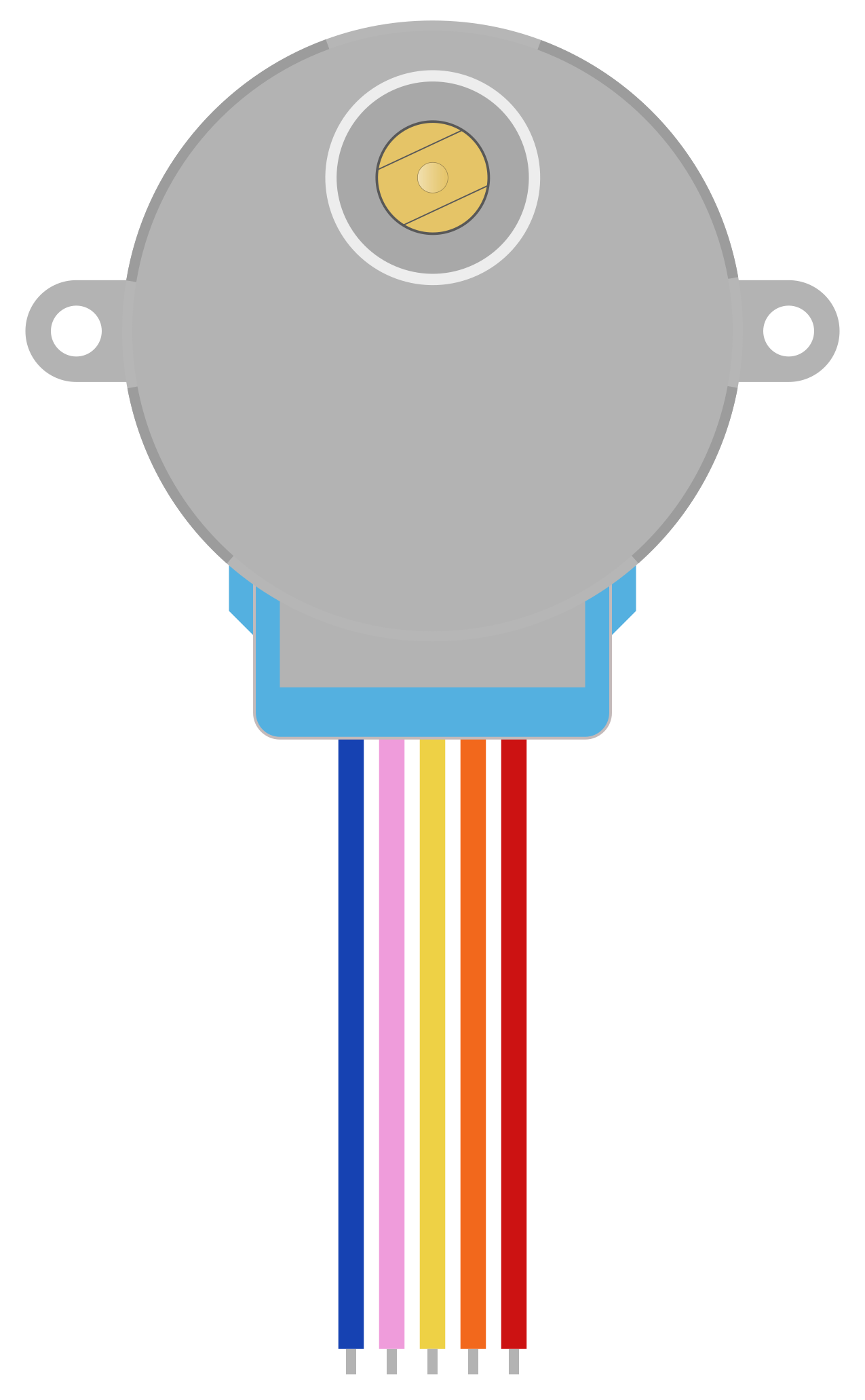
The 28BYJ-48 is a small, low-cost stepper motor widely used in robotics, automation, and DIY electronics projects. It is known for its precise control of rotation and ability to move in discrete steps, making it ideal for applications requiring accurate positioning. This motor is often paired with a ULN2003 driver board for easy interfacing with microcontrollers like Arduino.
Explore Projects Built with 28BYJ-48 Stepper Motor
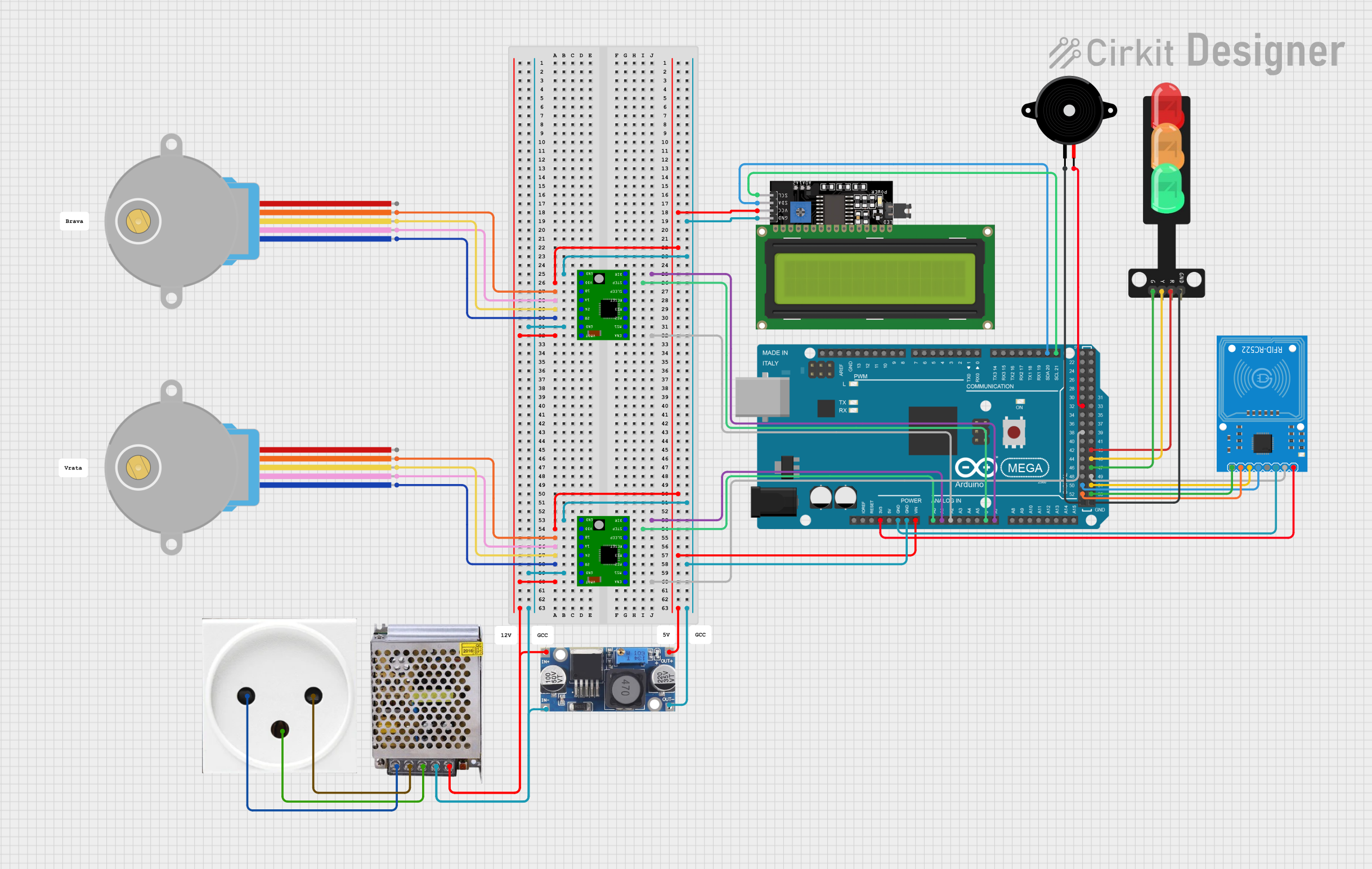
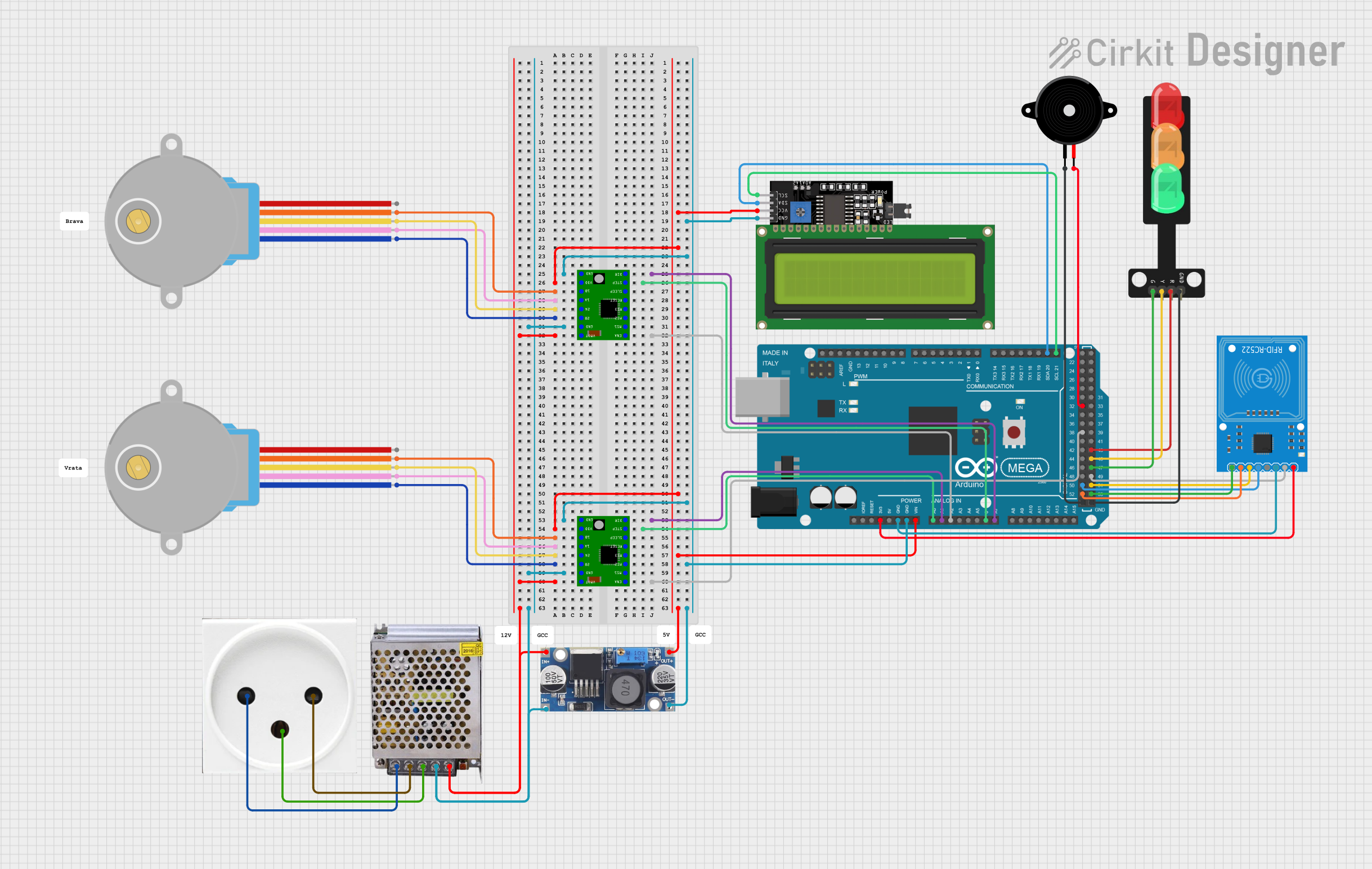

Explore Projects Built with 28BYJ-48 Stepper Motor
Common Applications
- Robotic arms and grippers
- Automated curtain systems
- 3D printers and CNC machines
- Camera sliders and gimbals
- Educational and hobbyist projects
Technical Specifications
The 28BYJ-48 stepper motor has the following key specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V DC |
| Step Angle | 5.625° (64 steps per revolution) |
| Gear Ratio | 1:64 |
| Phases | 4 |
| Drive Method | Unipolar |
| Rated Current | ~240 mA |
| Torque | ~300 g·cm |
| Dimensions | 28 mm diameter, 20 mm height |
Pin Configuration (ULN2003 Driver Board)
The 28BYJ-48 is typically used with the ULN2003 driver board, which has the following pin configuration:
| Pin Name | Description |
|---|---|
| IN1 | Input for coil 1 (connect to microcontroller) |
| IN2 | Input for coil 2 (connect to microcontroller) |
| IN3 | Input for coil 3 (connect to microcontroller) |
| IN4 | Input for coil 4 (connect to microcontroller) |
| VCC | Power supply (5V DC) |
| GND | Ground |
Usage Instructions
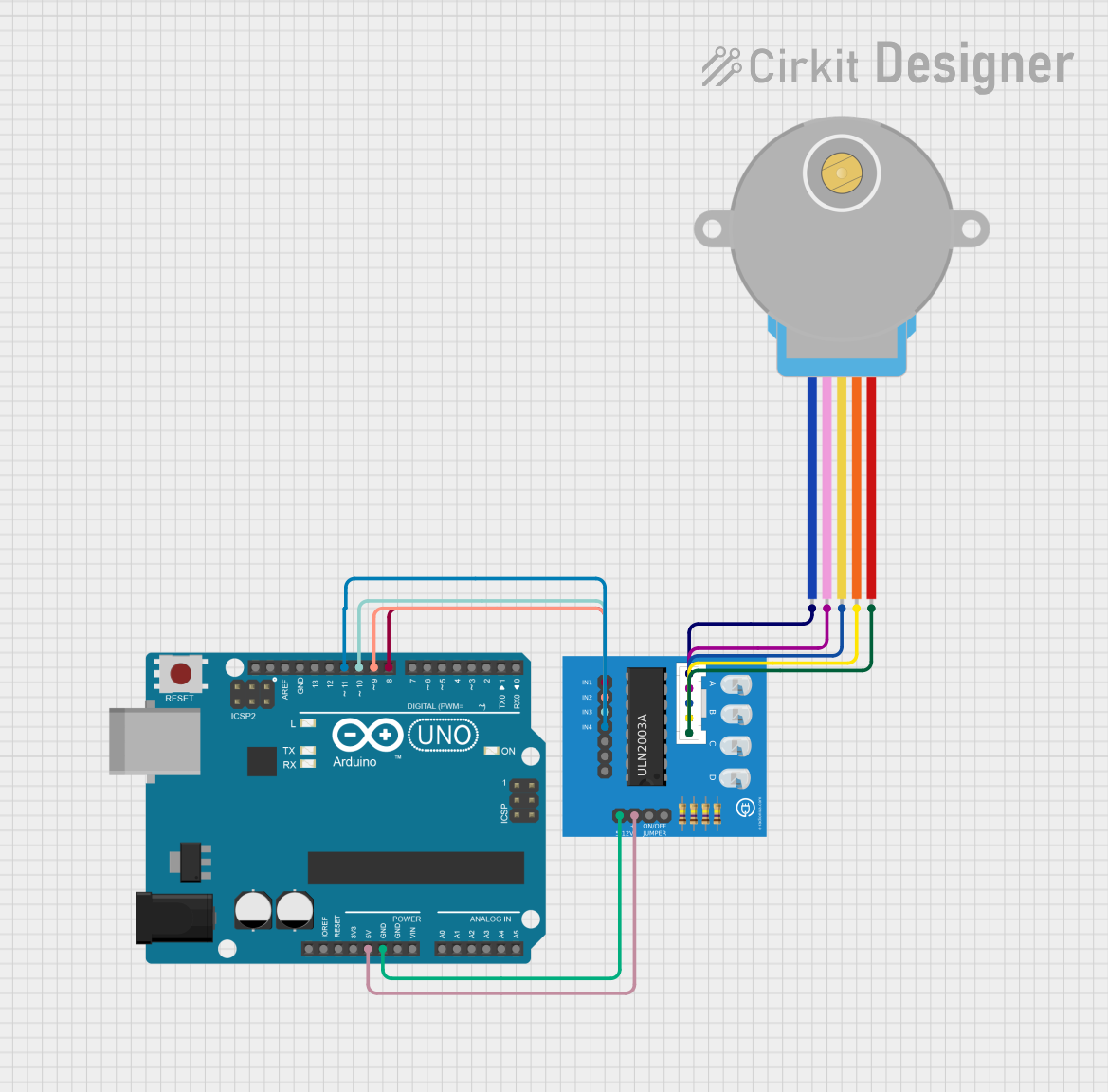
How to Use the 28BYJ-48 in a Circuit
- Connect the Motor to the ULN2003 Driver Board: Plug the 5-pin connector of the motor into the ULN2003 driver board.
- Power the Driver Board: Connect the VCC and GND pins of the driver board to a 5V DC power source.
- Connect the Driver Board to a Microcontroller:
- Connect the IN1, IN2, IN3, and IN4 pins of the driver board to four digital output pins on your microcontroller (e.g., Arduino).
- Write a Control Program: Use a stepper motor library or write custom code to control the motor's rotation.
Important Considerations
- Power Supply: Ensure the motor is powered with a stable 5V DC supply. Using a higher voltage may damage the motor.
- Current Limitation: Avoid exceeding the rated current of ~240 mA to prevent overheating.
- Step Accuracy: Due to the gear ratio, the motor requires 2048 steps for one full revolution of the output shaft.
- Speed and Torque: The motor's speed and torque are inversely related. Higher speeds may result in reduced torque.
Example Code for Arduino UNO
Below is an example Arduino sketch to control the 28BYJ-48 stepper motor using the ULN2003 driver board:
#include <Stepper.h>
// Define the number of steps per revolution for the motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library with the motor's steps and control pins
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
// Pins 8, 9, 10, and 11 are connected to IN1, IN2, IN3, and IN4 respectively
void setup() {
stepper.setSpeed(10); // Set motor speed to 10 RPM
Serial.begin(9600); // Initialize serial communication
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Rotating clockwise...");
stepper.step(STEPS_PER_REV); // Rotate one full revolution clockwise
delay(1000); // Wait for 1 second
Serial.println("Rotating counterclockwise...");
stepper.step(-STEPS_PER_REV); // Rotate one full revolution counterclockwise
delay(1000); // Wait for 1 second
}
Notes:
- Adjust the
stepper.setSpeed()value to change the motor's speed. - Ensure the motor is not stalled or overloaded, as this can cause overheating.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Rotating:
- Check the wiring between the motor, driver board, and microcontroller.
- Ensure the power supply is providing a stable 5V DC.
- Verify that the control pins in the code match the actual connections.
Motor Vibrates but Does Not Rotate:
- Ensure the step sequence in the code matches the motor's wiring.
- Check for loose or incorrect connections.
Motor Overheating:
- Reduce the operating current by limiting the duty cycle in the code.
- Avoid running the motor continuously for extended periods.
Inconsistent or Jerky Movement:
- Verify the stepper motor library is configured correctly.
- Ensure the power supply can provide sufficient current.
FAQs
Q: Can I power the motor directly from the Arduino?
A: It is not recommended, as the motor requires more current than the Arduino can safely supply. Use an external 5V power source.
Q: How do I increase the motor's torque?
A: Reduce the motor's speed using the setSpeed() function in your code. Lower speeds generally result in higher torque.
Q: Can I use the 28BYJ-48 with a 12V power supply?
A: No, the motor is designed for 5V operation. Using a higher voltage may damage the motor.
Q: How many steps are required for one full revolution?
A: The motor requires 2048 steps for one full revolution of the output shaft due to its 64:1 gear ratio.
By following this documentation, you can effectively use the 28BYJ-48 stepper motor in your projects and troubleshoot common issues.