How to Use MPU 6050: Examples, Pinouts, and Specs
Introduction
The MPU 6050 is a 6-axis motion tracking device that combines a 3-axis gyroscope and a 3-axis accelerometer. This versatile sensor is widely used in applications requiring motion sensing and orientation detection, such as:
- Drones and UAVs
- Robotics
- Gaming controllers
- Wearable devices
- Smartphones and tablets
- Motion capture systems
Explore Projects Built with MPU 6050
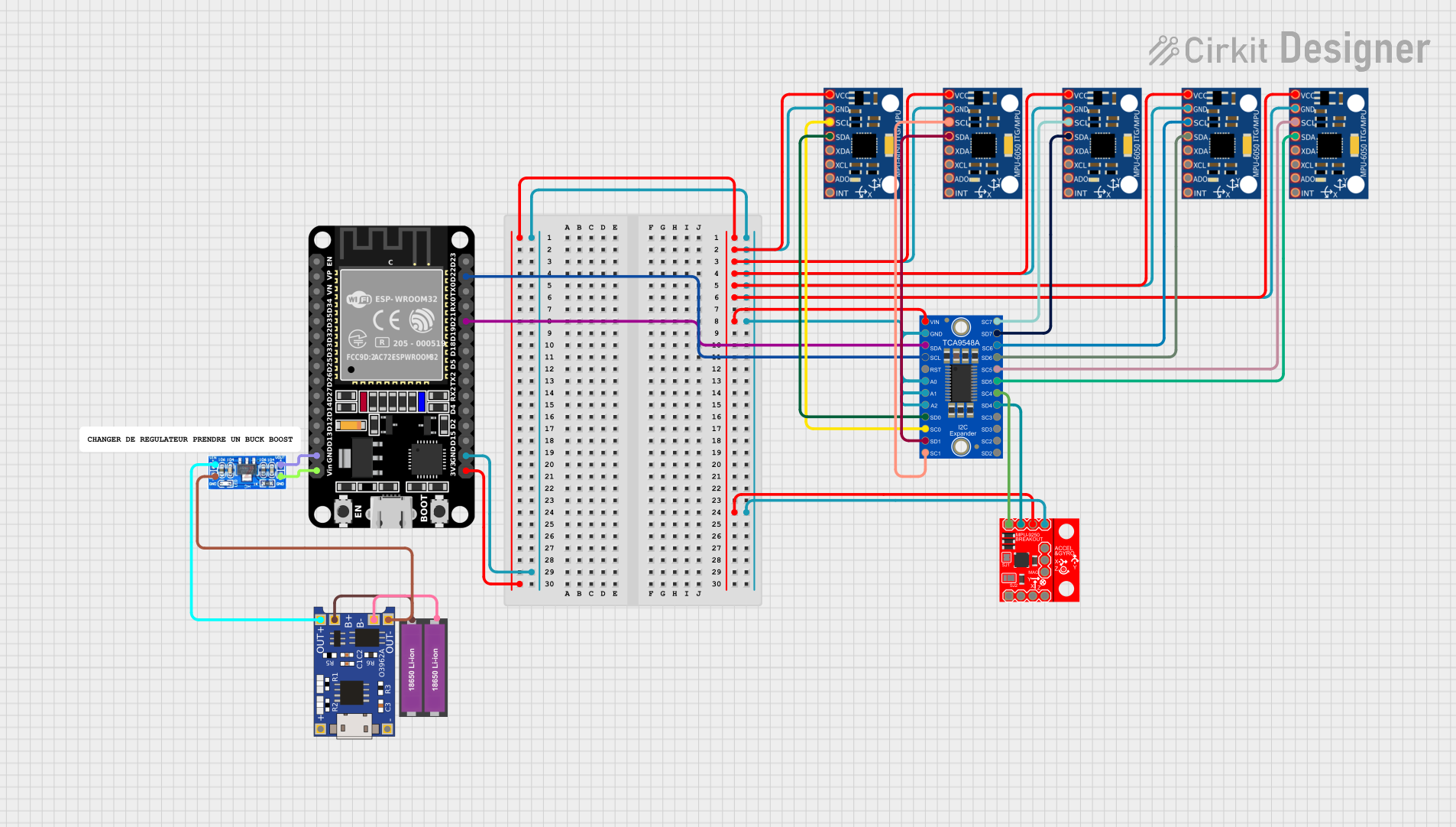
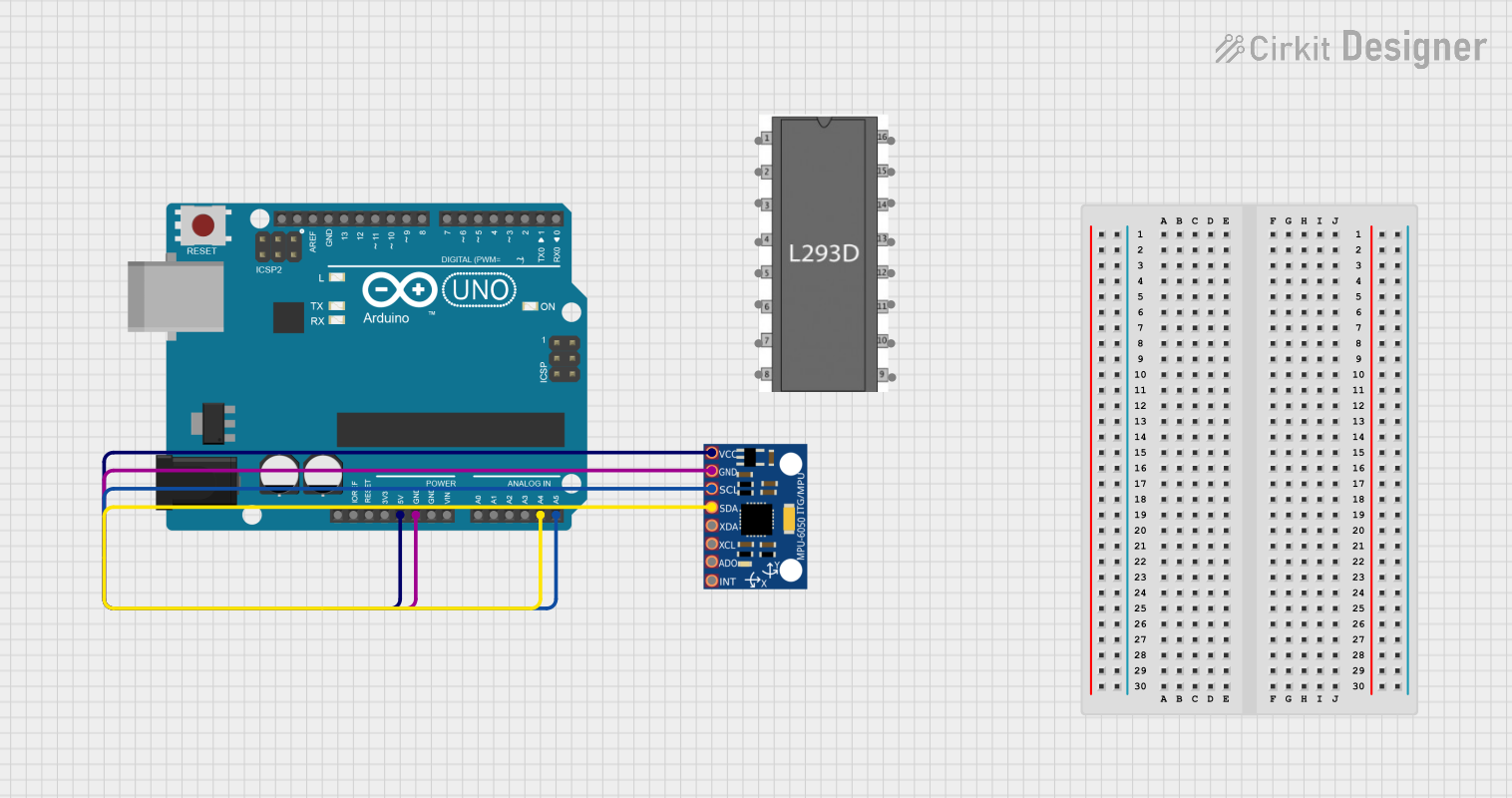
Explore Projects Built with MPU 6050
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Supply Voltage | 2.3V - 3.4V |
| Operating Current | 3.9mA |
| Gyroscope Range | ±250, ±500, ±1000, ±2000 °/s |
| Accelerometer Range | ±2g, ±4g, ±8g, ±16g |
| Communication | I2C |
| I2C Address | 0x68 (default), 0x69 |
| Operating Temperature | -40°C to +85°C |
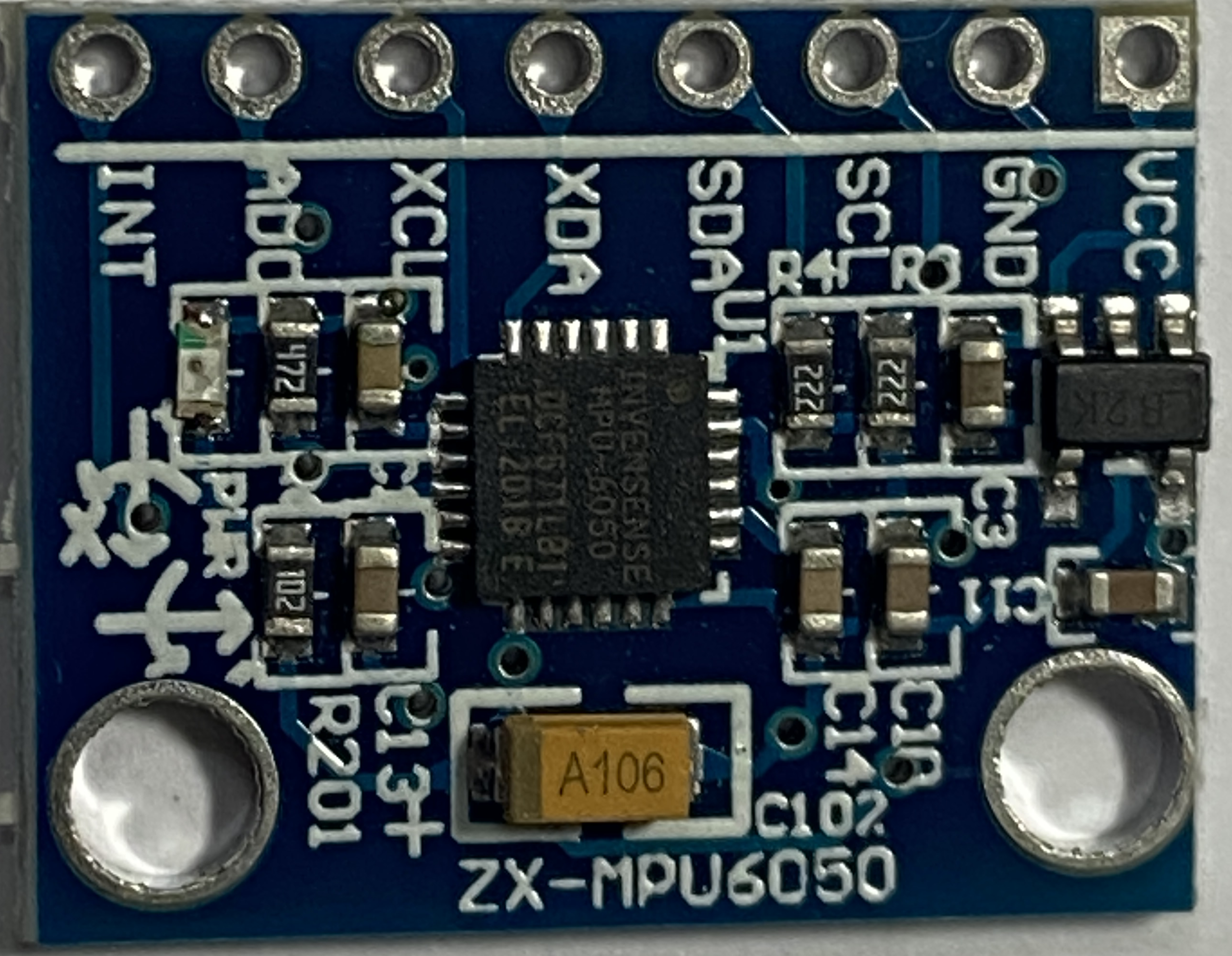
Pin Configuration and Descriptions
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (2.3V - 3.4V) |
| 2 | GND | Ground |
| 3 | SCL | I2C Clock |
| 4 | SDA | I2C Data |
| 5 | XDA | Auxiliary I2C Data (optional, not commonly used) |
| 6 | XCL | Auxiliary I2C Clock (optional, not commonly used) |
| 7 | AD0 | I2C Address Select (connect to GND for 0x68, VCC for 0x69) |
| 8 | INT | Interrupt (optional, used for motion detection) |
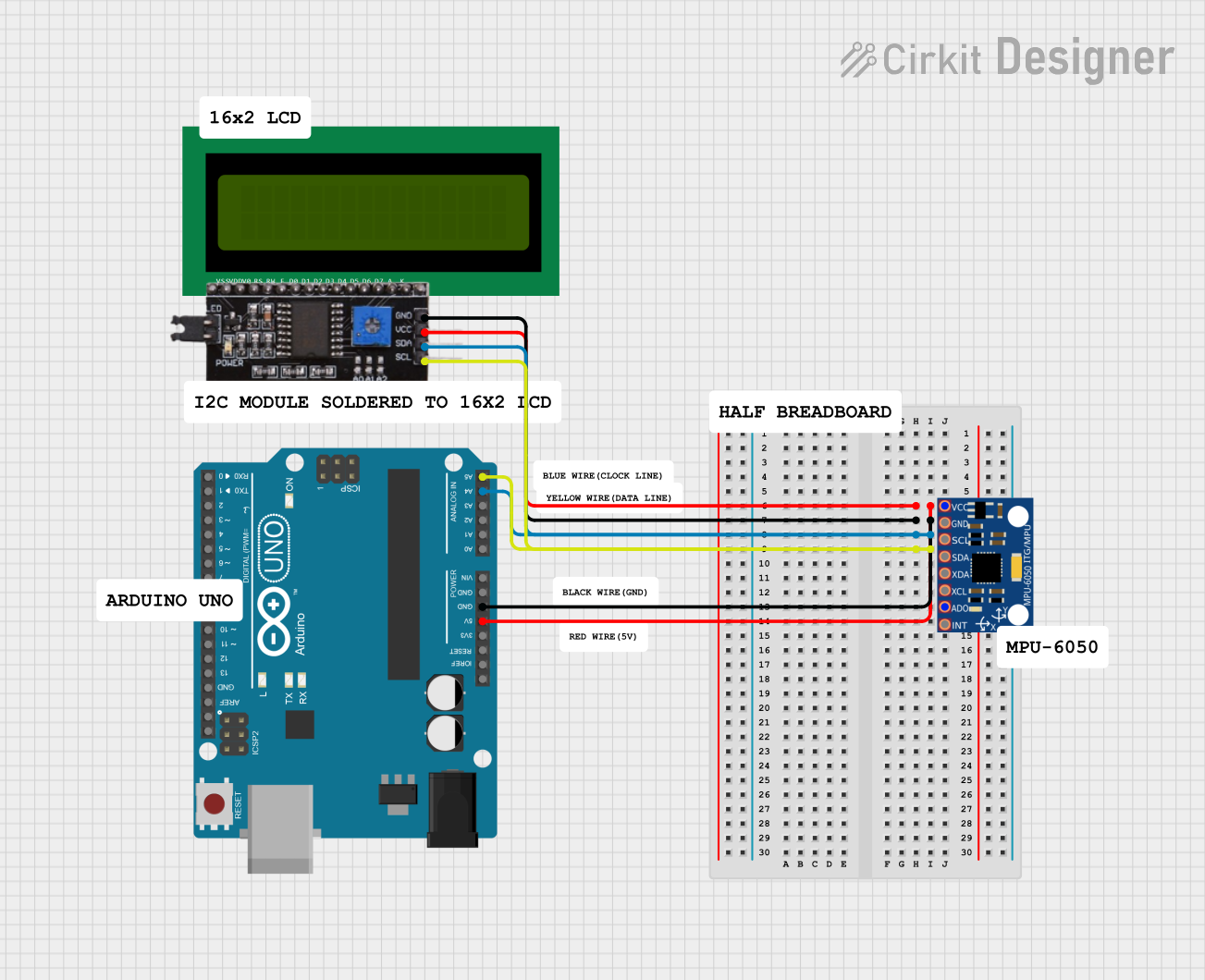
Usage Instructions
How to Use the MPU 6050 in a Circuit
- Power the Sensor: Connect the VCC pin to a 3.3V power supply and the GND pin to ground.
- I2C Communication: Connect the SCL pin to the I2C clock line and the SDA pin to the I2C data line of your microcontroller.
- Address Selection: Connect the AD0 pin to GND for the default I2C address (0x68) or to VCC for the alternate address (0x69).
- Optional Connections: If needed, connect the INT pin to a digital input on your microcontroller to use the interrupt feature.
Important Considerations and Best Practices
- Voltage Levels: Ensure that the voltage levels of the I2C lines match the logic levels of your microcontroller. Use level shifters if necessary.
- Bypass Capacitors: Place a 0.1µF capacitor close to the VCC pin to filter out noise.
- Pull-up Resistors: Use 4.7kΩ pull-up resistors on the SCL and SDA lines if they are not already present on your microcontroller board.
- Mounting: Secure the MPU 6050 on a stable platform to minimize vibrations and improve accuracy.
Example Code for Arduino UNO
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Wire.begin();
Serial.begin(9600);
// Initialize MPU6050
Serial.println("Initializing MPU6050...");
if (!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G)) {
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
while (1);
}
// Calibrate gyroscope. The calibration must be at rest.
Serial.println("Calibrating gyroscope...");
mpu.calibrateGyro();
// Set threshold sensibility. Default 3.
mpu.setThreshold(3);
}
void loop() {
Vector rawAccel = mpu.readRawAccel();
Vector normAccel = mpu.readNormalizeAccel();
Serial.print(" Xraw = ");
Serial.print(rawAccel.XAxis);
Serial.print(" Yraw = ");
Serial.print(rawAccel.YAxis);
Serial.print(" Zraw = ");
Serial.print(rawAccel.ZAxis);
Serial.print(" Xnorm = ");
Serial.print(normAccel.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normAccel.YAxis);
Serial.print(" Znorm = ");
Serial.println(normAccel.ZAxis);
delay(500);
}
Troubleshooting and FAQs
Common Issues
No Communication with MPU 6050:
- Solution: Check the I2C connections and ensure the correct I2C address is used. Verify that pull-up resistors are present on the SCL and SDA lines.
Inaccurate Readings:
- Solution: Ensure the sensor is mounted securely and away from sources of vibration. Calibrate the sensor before use.
Sensor Not Detected:
- Solution: Verify the power supply voltage and connections. Check for any loose wires or poor solder joints.
FAQs
Q: Can I use the MPU 6050 with a 5V microcontroller? A: Yes, but you will need to use level shifters for the I2C lines to match the 3.3V logic level of the MPU 6050.
Q: How do I change the I2C address of the MPU 6050? A: Connect the AD0 pin to GND for the default address (0x68) or to VCC for the alternate address (0x69).
Q: What is the maximum sampling rate of the MPU 6050? A: The MPU 6050 can sample data at a maximum rate of 1kHz.
Q: Can I use the MPU 6050 for tilt sensing? A: Yes, the accelerometer in the MPU 6050 can be used to measure tilt angles.
By following this documentation, you should be able to effectively integrate the MPU 6050 into your projects and troubleshoot common issues. Happy building!