How to Use Servo Motot: Examples, Pinouts, and Specs

Introduction
A servo motor is a rotary actuator that allows for precise control of angular position, velocity, and acceleration. It consists of a motor coupled to a sensor for position feedback, enabling accurate movement. Servo motors are widely used in robotics, automation, and control systems due to their reliability and precision.
Explore Projects Built with Servo Motot
Explore Projects Built with Servo Motot
Common Applications and Use Cases
- Robotics: Used for controlling robotic arms, grippers, and joints.
- RC Vehicles: Steering and throttle control in remote-controlled cars, boats, and planes.
- Automation Systems: Positioning systems in conveyor belts and industrial machinery.
- Camera Gimbals: Stabilizing and controlling camera angles.
- DIY Projects: Popular in hobbyist projects involving Arduino and other microcontrollers.
Technical Specifications
Below are the general specifications for a standard hobby servo motor (e.g., SG90 or MG996R). Specifications may vary depending on the model.
| Parameter | Value |
|---|---|
| Operating Voltage | 4.8V to 6V |
| Stall Torque | 1.8 kg·cm (SG90) to 10 kg·cm (MG996R) |
| Operating Speed | ~0.1 to 0.2 seconds per 60° |
| Control Signal | PWM (Pulse Width Modulation) |
| PWM Pulse Range | 500 µs to 2500 µs |
| Angle Range | 0° to 180° (typical) |
| Idle Current | ~10 mA |
| Stall Current | ~1.5 A (varies by model) |
Pin Configuration and Descriptions
Servo motors typically have three wires for connection:
| Pin | Wire Color | Description |
|---|---|---|
| 1 | Brown/Black | Ground (GND) |
| 2 | Red | Power Supply (VCC) |
| 3 | Orange/White | Signal (PWM Input) |
Usage Instructions
How to Use the Servo Motor in a Circuit
- Power the Servo Motor: Connect the red wire to a 5V power source and the black wire to ground (GND). Ensure the power supply can handle the current requirements of the servo.
- Connect the Signal Pin: Attach the signal wire to a PWM-capable pin on your microcontroller (e.g., Arduino).
- Control the Servo: Use PWM signals to control the angular position of the servo. The pulse width determines the angle:
- 1 ms (1000 µs) corresponds to 0°.
- 1.5 ms (1500 µs) corresponds to 90° (center position).
- 2 ms (2000 µs) corresponds to 180°.
Important Considerations and Best Practices
- Power Supply: Use a separate power supply for the servo motor if it draws significant current, as this can prevent voltage drops and protect your microcontroller.
- PWM Signal: Ensure the PWM signal is stable and within the specified range to avoid erratic behavior.
- Mechanical Load: Avoid overloading the servo motor, as this can cause overheating or damage.
- Mounting: Secure the servo motor properly to prevent vibrations or misalignment during operation.
Example: Controlling a Servo Motor with Arduino UNO
Below is an example code to control a servo motor using an Arduino UNO:
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a Servo object to control the motor
void setup() {
myServo.attach(9); // Attach the servo to pin 9 on the Arduino
}
void loop() {
myServo.write(0); // Move the servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move the servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180); // Move the servo to 180 degrees
delay(1000); // Wait for 1 second
}
Notes on the Code
- The
Servolibrary simplifies the process of generating PWM signals. - The
myServo.write(angle)function sets the servo to a specific angle (0° to 180°). - Ensure the servo is connected to a PWM-capable pin (e.g., pin 9 on the Arduino UNO).
Troubleshooting and FAQs
Common Issues and Solutions
Servo Motor Not Moving
- Cause: Insufficient power supply.
- Solution: Use a power source that meets the servo's voltage and current requirements.
Erratic or Jittery Movement
- Cause: Unstable PWM signal or electrical noise.
- Solution: Check the signal connection and use decoupling capacitors near the servo.
Overheating
- Cause: Excessive mechanical load or prolonged stall condition.
- Solution: Reduce the load or avoid stalling the servo for extended periods.
Limited Range of Motion
- Cause: Incorrect PWM pulse width or mechanical obstruction.
- Solution: Verify the PWM signal range and ensure there are no physical obstructions.
FAQs
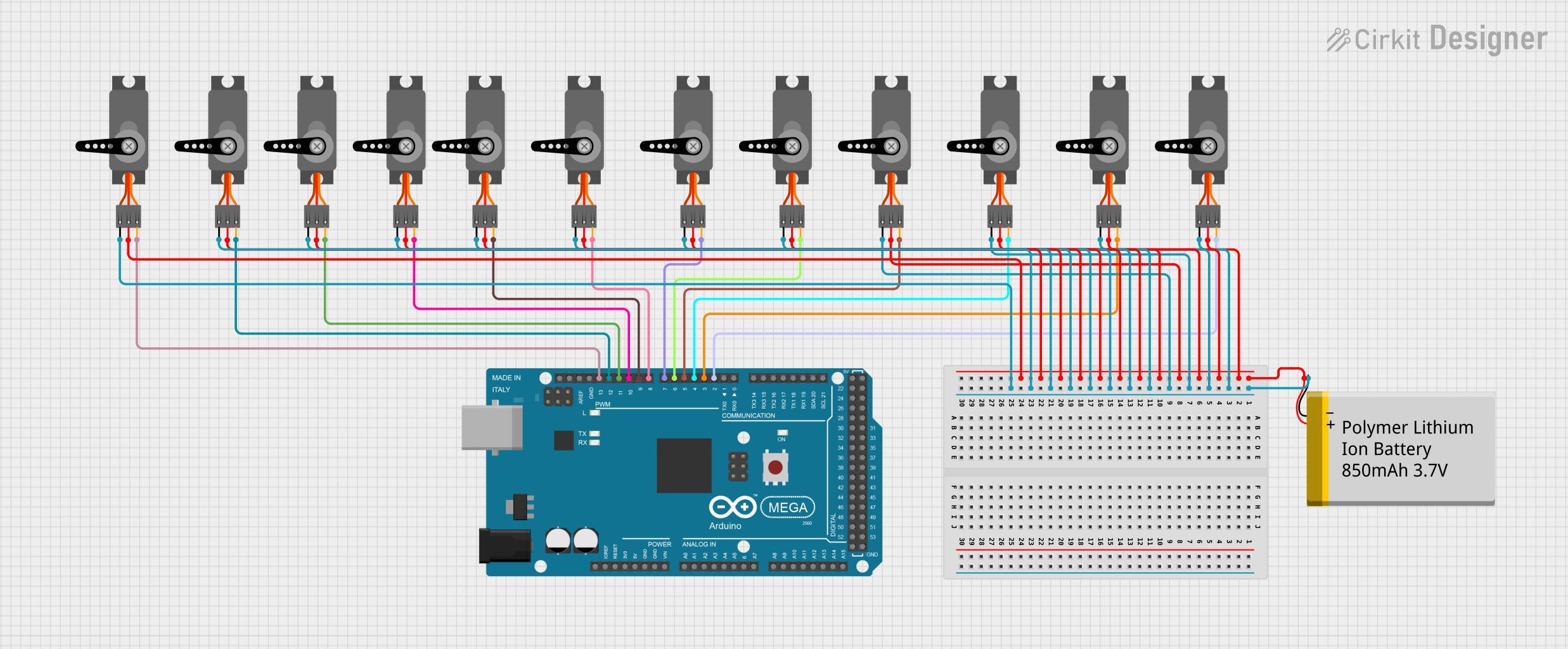
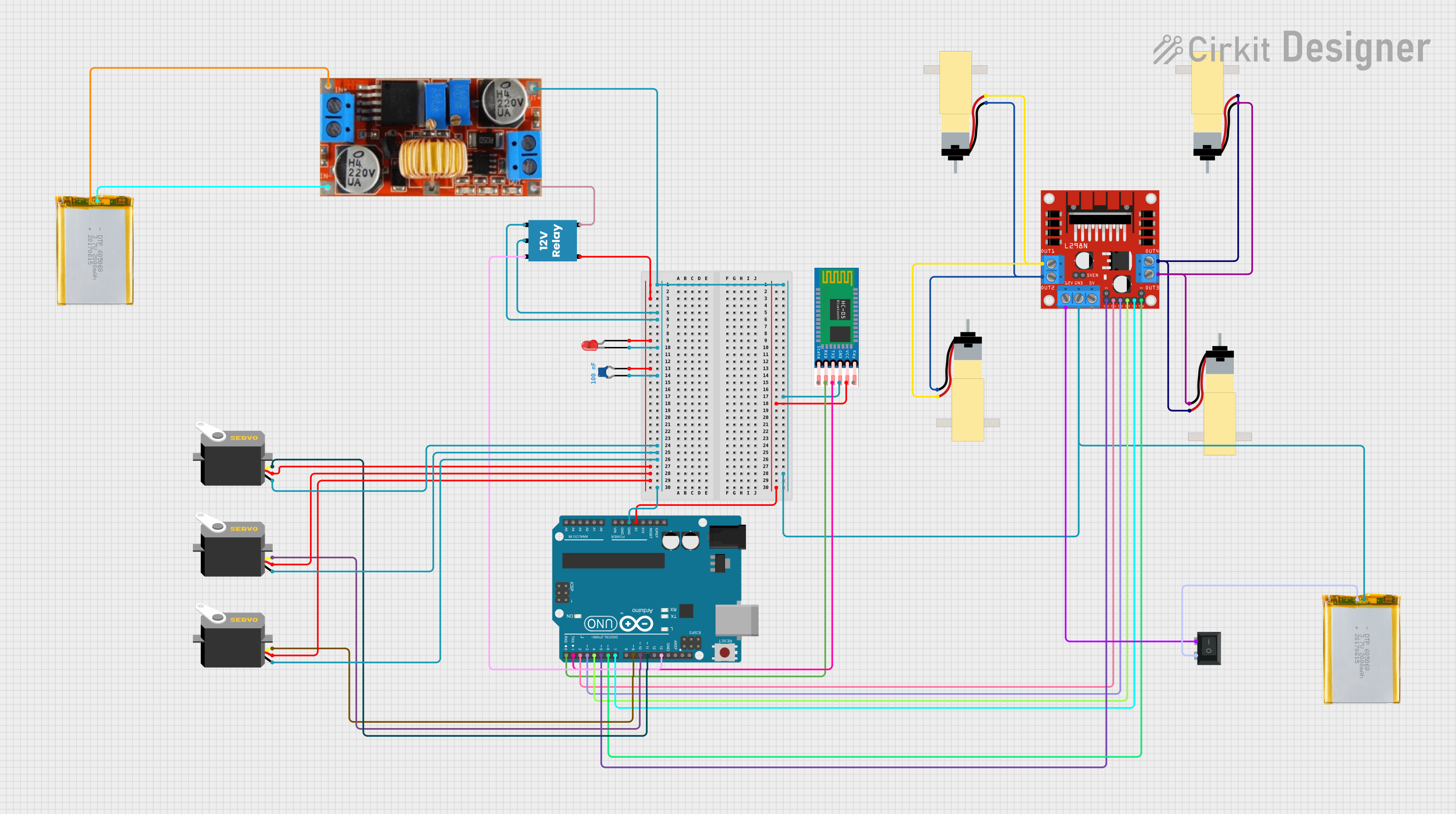
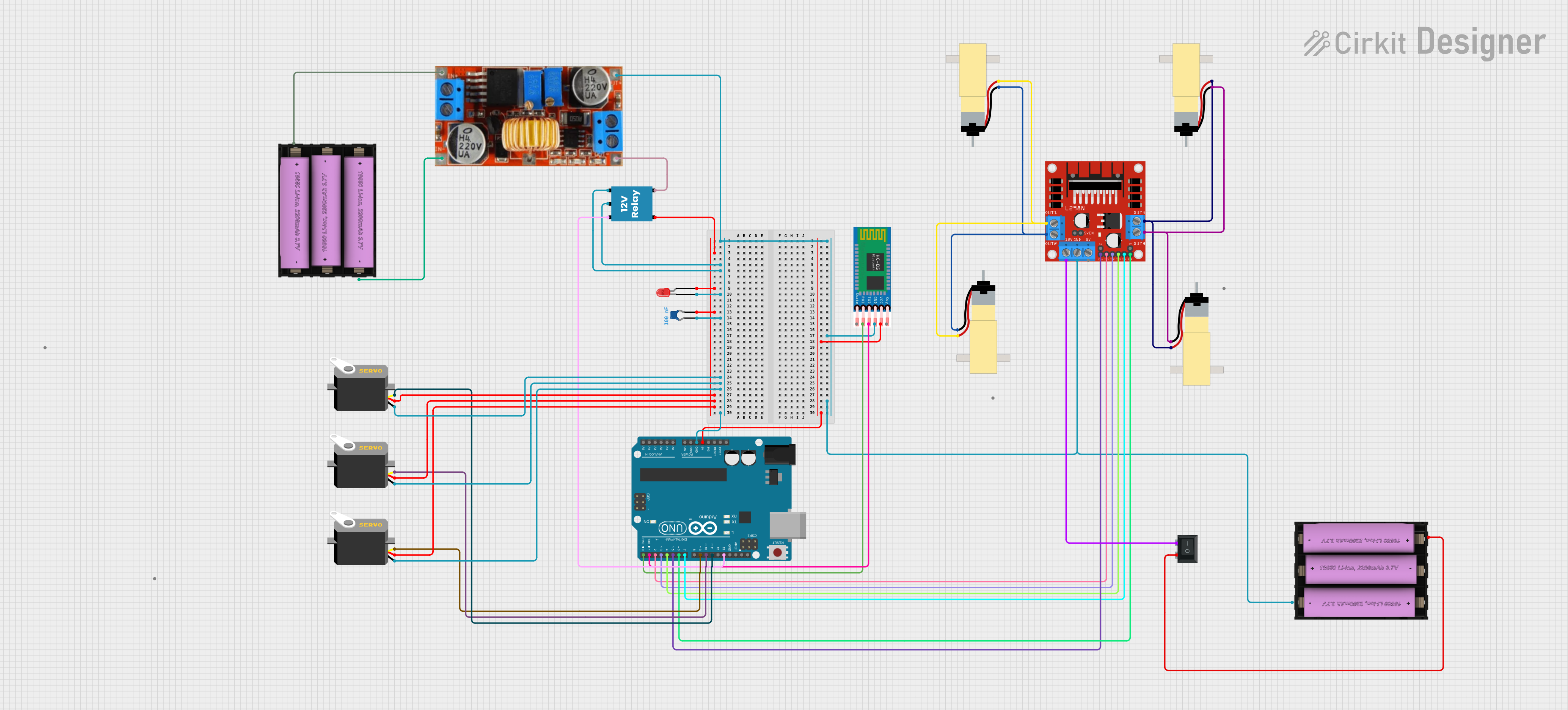
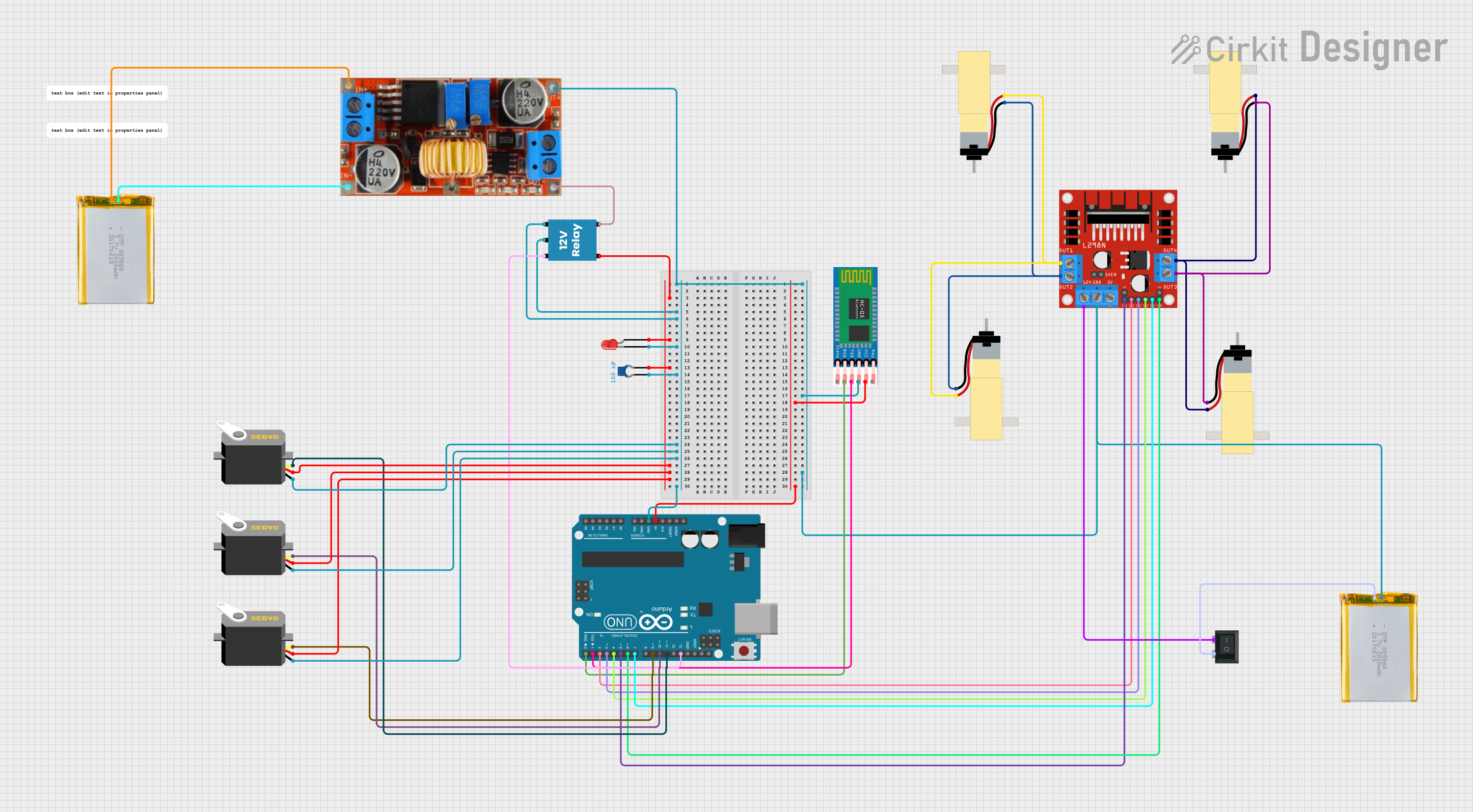
Q: Can I connect multiple servo motors to a single Arduino?
- A: Yes, but ensure the power supply can handle the combined current draw. Use separate power sources if necessary.
Q: What happens if I exceed the servo's angle range?
- A: The servo may attempt to move beyond its physical limits, potentially causing damage. Always stay within the specified range (e.g., 0° to 180°).
Q: Can I use a servo motor without a microcontroller?
- A: Yes, you can use a servo tester or generate PWM signals using other circuits, but a microcontroller provides more flexibility and control.
By following this documentation, you can effectively integrate and troubleshoot servo motors in your projects.