How to Use CAN Bus Shield: Examples, Pinouts, and Specs
Introduction
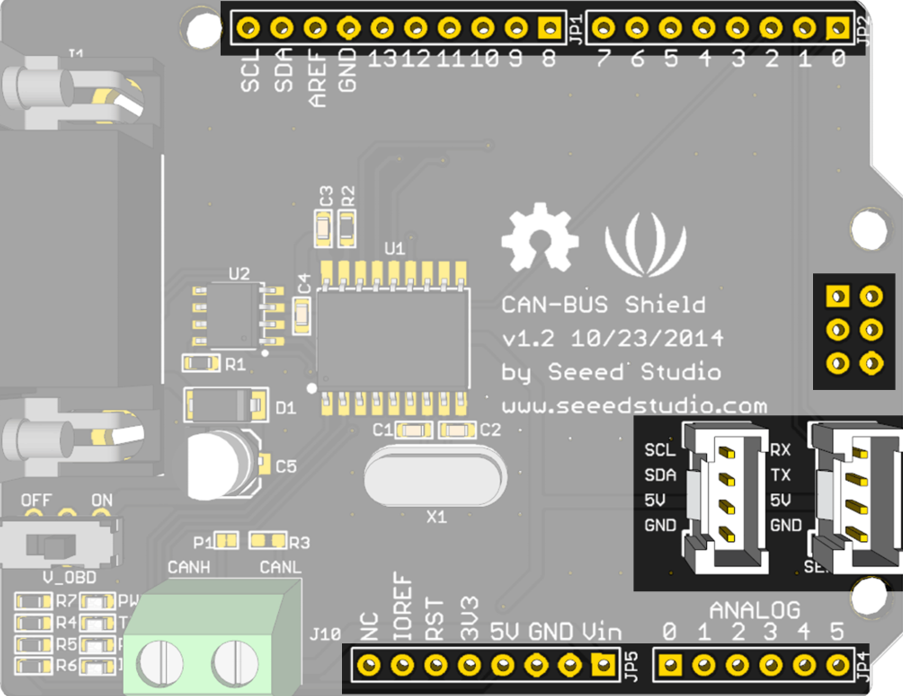
The CAN Bus Shield by SEEED is an expansion board designed to enable Arduino boards to communicate over a Controller Area Network (CAN). This shield is particularly useful for automotive and industrial applications where multiple microcontrollers need to communicate with each other efficiently without a host computer.
Common applications include:
- Automotive diagnostics
- Industrial automation systems
- Robotics control systems
- Data logging from various sensors
Explore Projects Built with CAN Bus Shield
Explore Projects Built with CAN Bus Shield
Technical Specifications
Key Technical Details
- Operating Voltage: 5V (from Arduino Board)
- CAN Controller: MCP2515, interfaced via SPI
- CAN Transceiver: TJA1050
- CAN Bus Speed: Up to 1 Mb/s
- Oscillator Frequency: 16 MHz
- Standard (11 bit) and Extended (29 bit) Data and Remote Frames
Pin Configuration and Descriptions
| Pin Number | Function | Description |
|---|---|---|
| D2 | INT | Interrupt pin, signals the Arduino of incoming messages |
| D9 | CS | Chip Select for SPI communication with MCP2515 |
| D10 | Not Connected | Reserved for future use |
| D11 | MOSI | SPI communication with MCP2515 |
| D12 | MISO | SPI communication with MCP2515 |
| D13 | SCK | SPI Clock |
| GND | Ground | Ground connection |
| VCC | Power Supply | 5V power supply from the Arduino |
Usage Instructions
Connecting the Shield to an Arduino
- Power off your Arduino board.
- Align the shield's pins with the corresponding headers on the Arduino.
- Gently press down until the shield is firmly seated on the Arduino.
Initializing the CAN Bus Shield
Before using the shield, you need to initialize the CAN controller and set the desired baud rate for communication. Here's an example of how to do this using the MCP_CAN library:
#include <mcp_can.h>
#include <SPI.h>
// The SPI Chip Select pin for the CAN controller
const int SPI_CS_PIN = 9;
MCP_CAN CAN(SPI_CS_PIN); // Set CS pin for CAN controller
void setup() {
Serial.begin(115200);
// Initialize CAN bus at 500 kbps
if (CAN_OK == CAN.begin(CAN_500KBPS)) {
Serial.println("CAN Bus Shield initialized at 500 kbps.");
} else {
Serial.println("CAN Bus Shield initialization failed.");
}
}
void loop() {
// Code to send and receive data goes here
}
Sending CAN Messages
To send data over the CAN bus, you can use the sendMsgBuf function provided by the MCP_CAN library:
unsigned char message[8] = {0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07};
// Send a standard frame with ID 0x100 and length of 8 bytes
CAN.sendMsgBuf(0x100, 0, 8, message);
Receiving CAN Messages
To receive data, you can use the readMsgBuf and checkReceive functions:
unsigned char len = 0;
unsigned char buf[8];
if (CAN_MSGAVAIL == CAN.checkReceive()) {
CAN.readMsgBuf(&len, buf); // Read data: len = data length, buf = data byte(s)
unsigned long canId = CAN.getCanId();
Serial.print("Message received with ID: ");
Serial.print(canId, HEX);
Serial.print(" Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
Best Practices
- Ensure that the CAN bus network has proper termination resistors.
- Avoid long wires in the CAN bus to minimize signal reflection.
- Use twisted pair cables for CAN_H and CAN_L to reduce electromagnetic interference.
Troubleshooting and FAQs
Common Issues
- CAN Bus Shield not recognized: Ensure that the shield is properly seated on the Arduino and that the SPI pins are not being used by another device.
- CAN Bus not communicating: Check the baud rate settings and ensure that all devices on the network are configured with the same rate.
- No data being received: Verify that the CAN bus has termination resistors and that the wiring is correct.
Solutions and Tips
- Use the
CAN.init_Filt()andCAN.init_Mask()functions to configure message filtering if you're only interested in certain CAN IDs. - If you're experiencing noise on the CAN bus, try lowering the baud rate or improving the bus wiring.
- Always use the latest version of the
MCP_CANlibrary for compatibility and bug fixes.
FAQs
Q: Can I use multiple CAN Bus Shields on the same network? A: Yes, you can use multiple shields on the same CAN network, but each device must have a unique ID.
Q: What is the maximum length of the CAN bus? A: The maximum length depends on the baud rate; for example, at 500 kbps, the maximum length is typically around 100 meters.
Q: How do I know if my CAN Bus Shield is working? A: You can test the shield by sending messages and checking if they are received by another CAN device. The onboard LED indicators can also provide a visual indication of activity.
For further assistance, consult the SEEED forums or contact technical support.