How to Use Ultrasonic - PING 28015: Examples, Pinouts, and Specs
Introduction
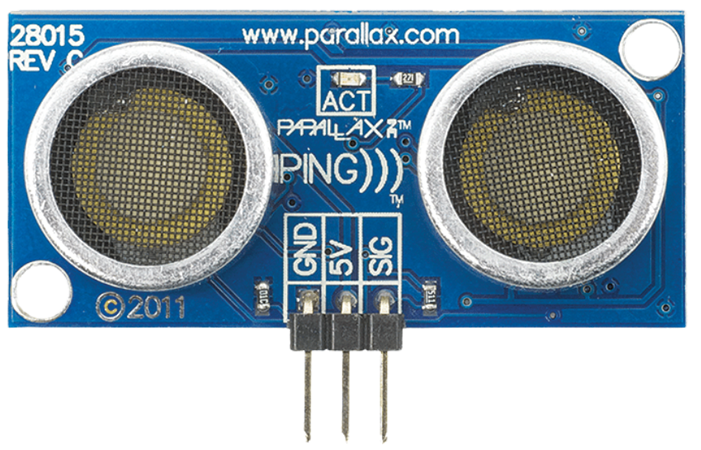
The PING 28015 is an ultrasonic distance sensor manufactured by Parallax. It measures the distance to an object by emitting ultrasonic sound waves and calculating the time it takes for the echo to return. This sensor is widely used in robotics, automation, and other applications requiring precise distance measurement or obstacle detection.
Explore Projects Built with Ultrasonic - PING 28015
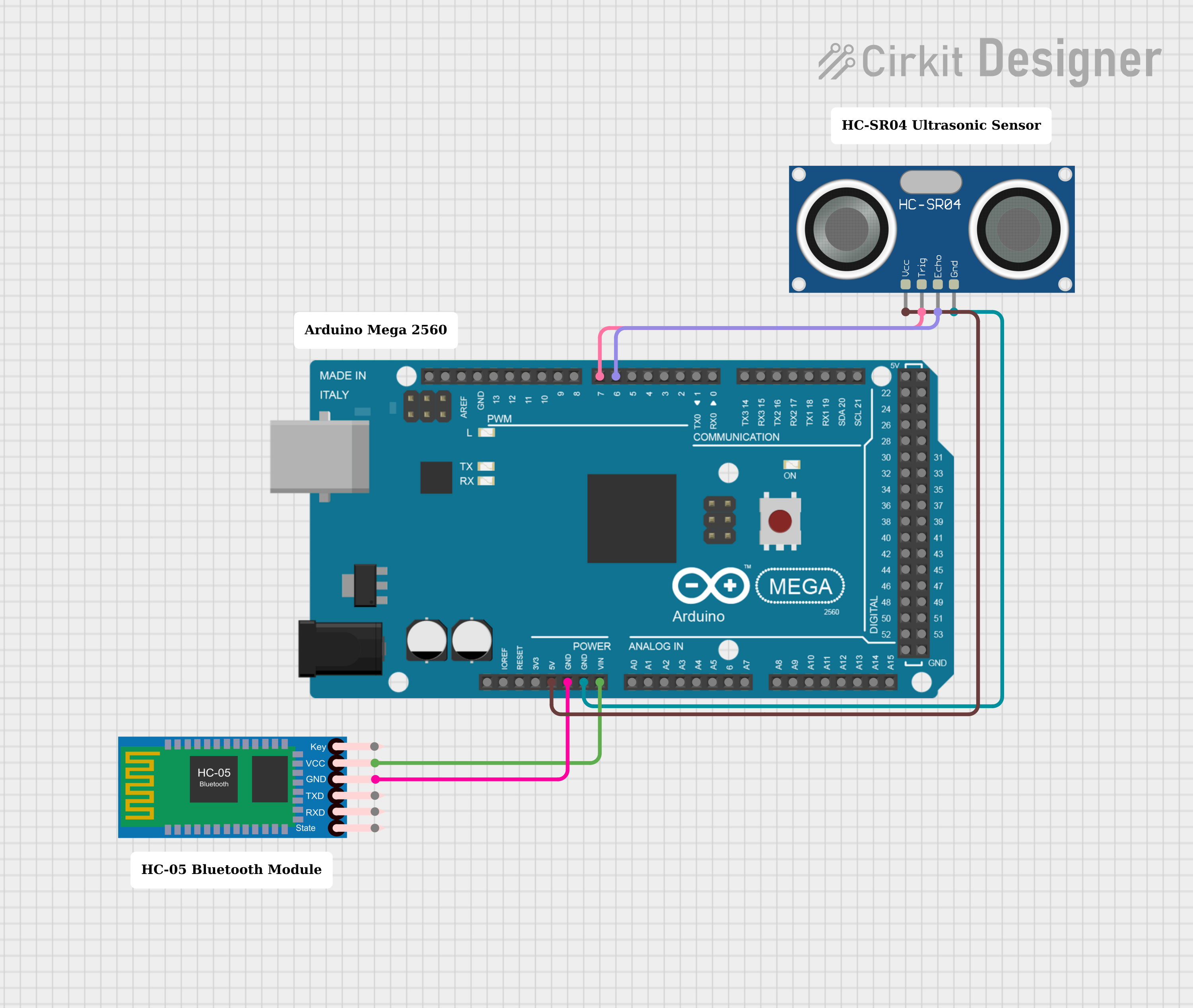
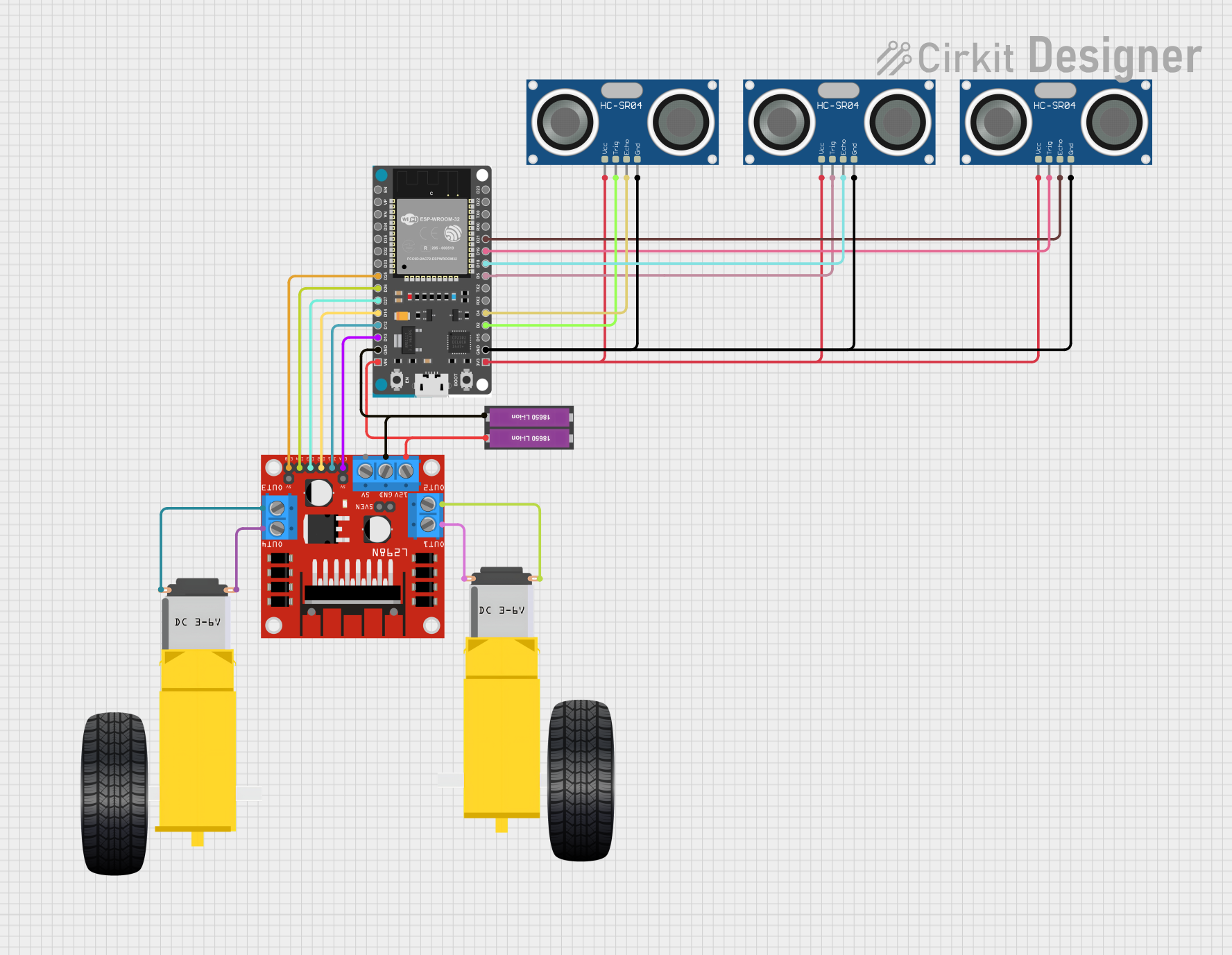
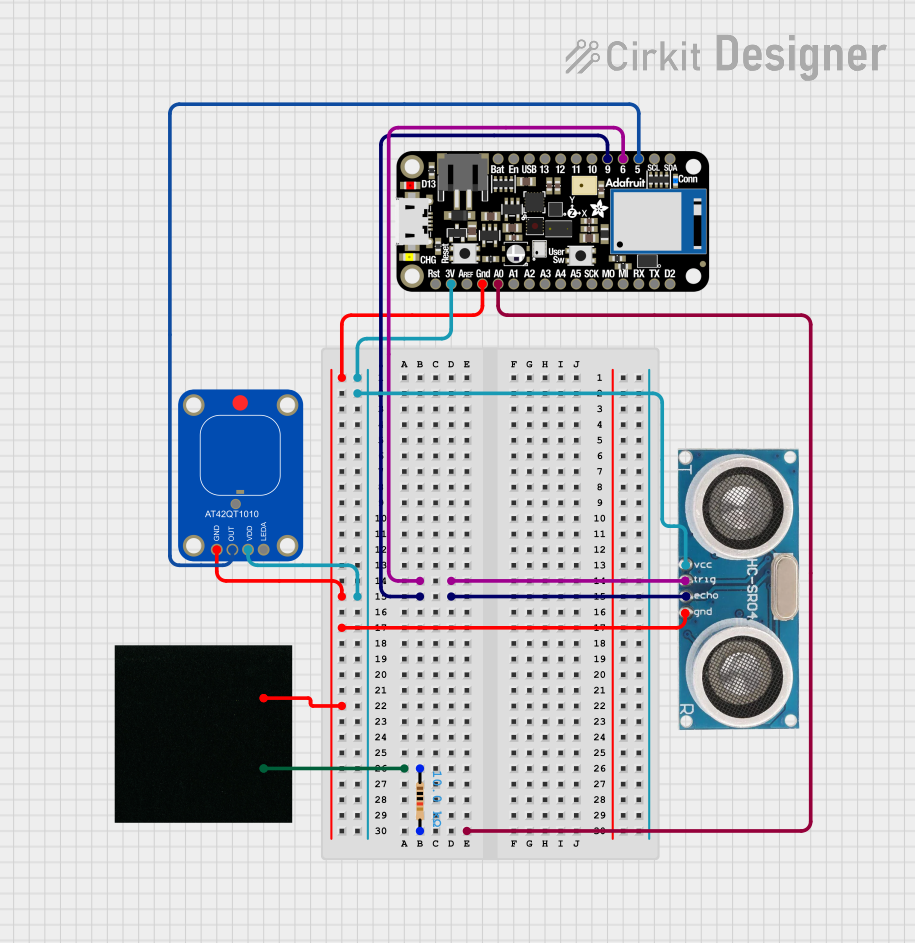
Explore Projects Built with Ultrasonic - PING 28015
Common Applications
- Obstacle detection in robotics
- Distance measurement in automation systems
- Proximity sensing in security systems
- Object tracking in smart devices
Technical Specifications
The PING 28015 sensor is designed for ease of use and reliable performance. Below are its key technical details:
| Parameter | Value |
|---|---|
| Operating Voltage | 5 V DC |
| Operating Current | 30 mA (typical) |
| Measurement Range | 2 cm to 3 m |
| Measurement Resolution | 2 mm |
| Signal Frequency | 40 kHz |
| Interface | Single I/O pin for trigger/echo |
| Dimensions | 22 mm x 46 mm x 16 mm |
| Operating Temperature | 0°C to 70°C |
Pin Configuration
The PING 28015 has a 3-pin interface for power, ground, and signal. Below is the pinout:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (5 V DC) |
| 2 | SIG | Signal pin for both trigger and echo (bidirectional) |
| 3 | GND | Ground connection |
Usage Instructions
The PING 28015 sensor is simple to use and requires only one I/O pin for operation. Below are the steps to integrate it into a circuit and use it effectively:
Circuit Connection
- Connect the VCC pin to a 5 V power supply.
- Connect the GND pin to the ground of your circuit.
- Connect the SIG pin to a digital I/O pin on your microcontroller (e.g., Arduino UNO).
How It Works
The microcontroller sends a short HIGH pulse (minimum 2 µs) to the SIG pin to trigger the sensor.
The sensor emits an ultrasonic pulse and waits for the echo to return.
The sensor outputs a HIGH pulse on the SIG pin, where the duration of the pulse corresponds to the time taken for the echo to return.
The microcontroller measures the duration of the HIGH pulse and calculates the distance using the formula:
[ \text{Distance (cm)} = \frac{\text{Pulse Duration (µs)}}{58} ]
Arduino UNO Example Code
Below is an example code to use the PING 28015 with an Arduino UNO:
// Define the pin connected to the SIG pin of the PING 28015
const int pingPin = 7;
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
}
void loop() {
long duration, distance;
// Send a 2 µs HIGH pulse to trigger the sensor
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// Set the pin to input mode to read the echo
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// Calculate the distance in cm
distance = duration / 58;
// Print the distance to the Serial Monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
delay(100); // Wait 100 ms before the next measurement
}
Best Practices
- Ensure the sensor is mounted securely to avoid vibrations that may affect accuracy.
- Avoid placing the sensor near ultrasonic noise sources (e.g., other ultrasonic sensors).
- Use a decoupling capacitor (e.g., 10 µF) across the power supply pins to reduce noise.
Troubleshooting and FAQs
Common Issues and Solutions
No Output or Incorrect Readings
- Ensure the sensor is powered with 5 V DC.
- Verify the connections to the microcontroller are correct.
- Check for loose or damaged wires.
Inconsistent Distance Measurements
- Ensure there are no obstructions or reflective surfaces near the sensor.
- Avoid using the sensor in environments with high ultrasonic noise.
Sensor Not Responding
- Confirm the microcontroller is sending a proper trigger pulse (minimum 2 µs).
- Check the SIG pin for proper signal levels using an oscilloscope or logic analyzer.
FAQs
Q: Can the PING 28015 detect transparent objects?
A: The sensor may have difficulty detecting transparent or very small objects due to poor ultrasonic reflection.
Q: What is the maximum range of the sensor?
A: The maximum range is 3 meters, but accuracy may decrease at longer distances.
Q: Can I use multiple PING 28015 sensors in the same project?
A: Yes, but ensure they are triggered sequentially to avoid interference between sensors.
Q: Is the PING 28015 compatible with 3.3 V microcontrollers?
A: The sensor requires a 5 V power supply, but the SIG pin can interface with 3.3 V logic levels. Use a level shifter if needed.