How to Use MPU 6050: Examples, Pinouts, and Specs
Introduction
The MPU 6050 is a 6-axis motion tracking device that combines a 3-axis gyroscope and a 3-axis accelerometer on a single chip. This compact and versatile sensor is widely used in applications requiring motion sensing and orientation detection. Its ability to measure angular velocity and linear acceleration makes it ideal for robotics, drones, smartphones, gaming devices, and wearable technology.
Explore Projects Built with MPU 6050
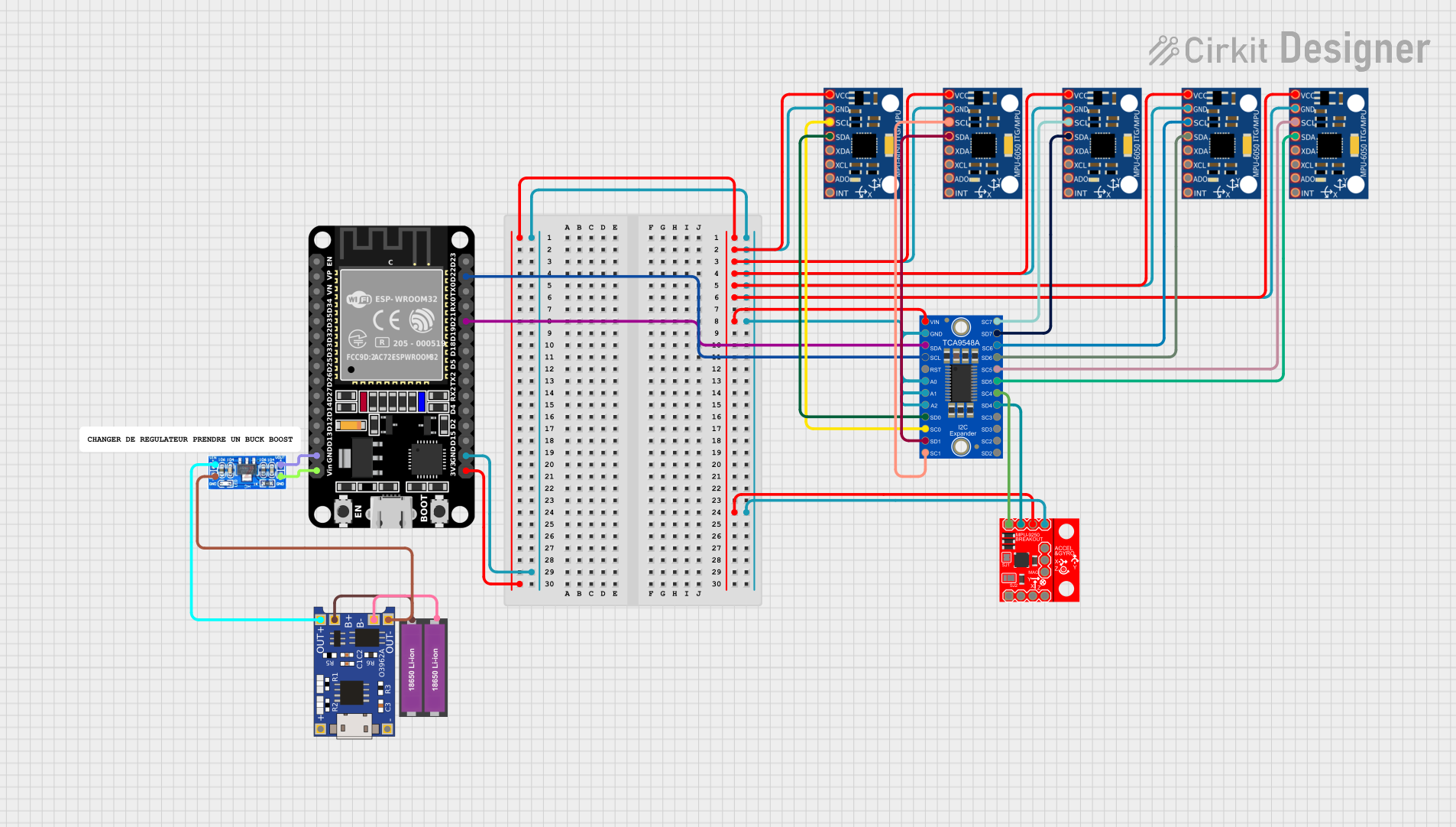
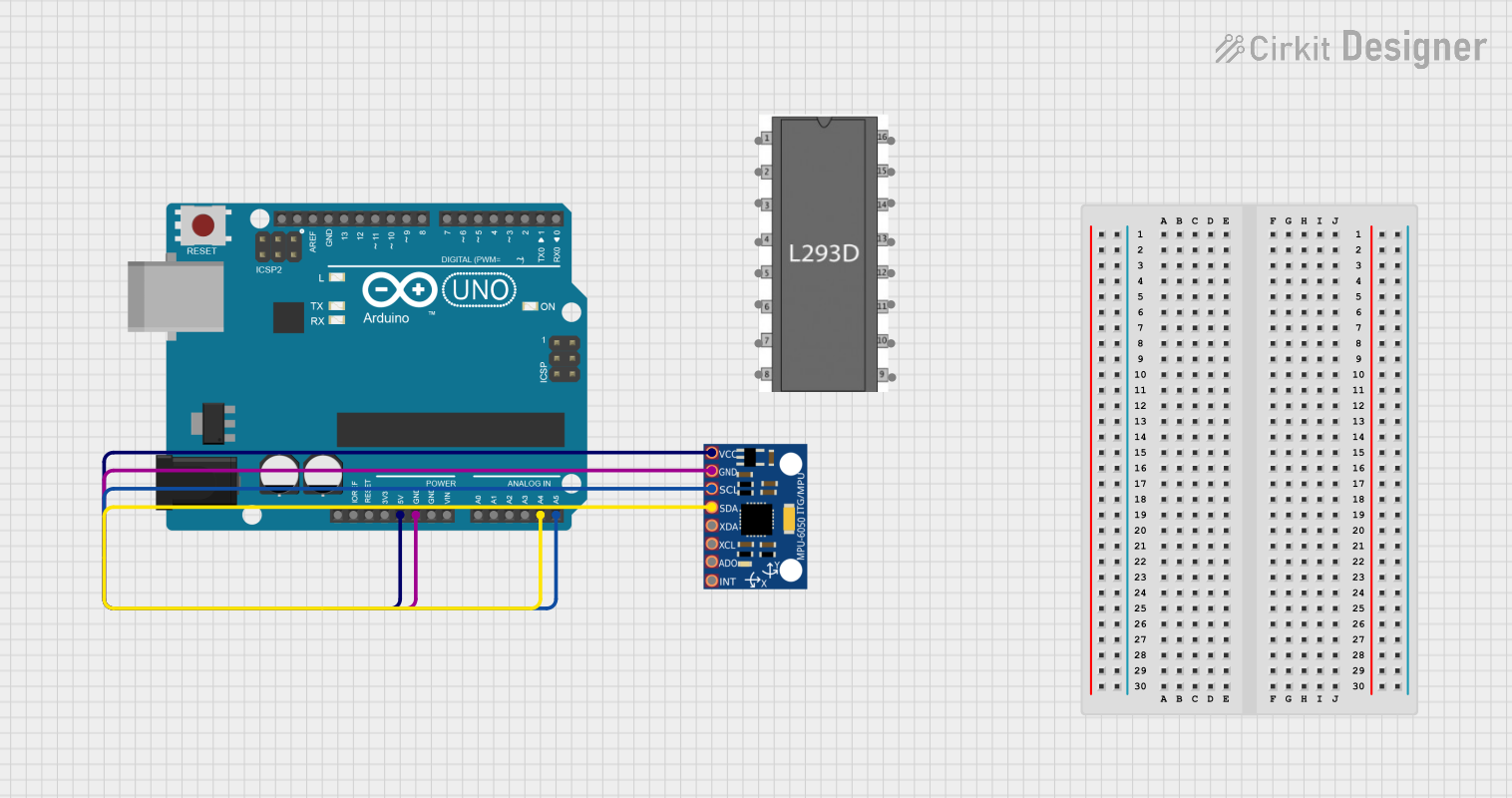
Explore Projects Built with MPU 6050
Common Applications:
- Robotics for motion control and navigation
- Drones for stabilization and orientation
- Smartphones for gesture recognition and screen rotation
- Gaming devices for motion-based controls
- Wearable devices for fitness tracking and activity monitoring
Technical Specifications
The MPU 6050 is a highly integrated device with the following key specifications:
| Parameter | Value |
|---|---|
| Supply Voltage | 2.375V to 3.46V |
| Logic Voltage Level | 1.8V to VDD |
| Gyroscope Range | ±250, ±500, ±1000, ±2000 °/s |
| Accelerometer Range | ±2g, ±4g, ±8g, ±16g |
| Communication Interface | I2C (up to 400kHz) |
| Operating Temperature | -40°C to +85°C |
| Power Consumption | 3.9mA (typical) |
| Package | 4x4x0.9mm QFN |
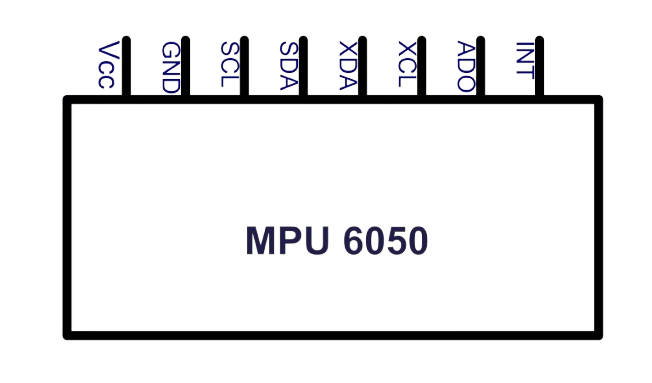
Pin Configuration and Descriptions
The MPU 6050 has 8 pins, as described in the table below:
| Pin | Name | Description |
|---|---|---|
| 1 | VDD | Power supply input (2.375V to 3.46V). |
| 2 | VLOGIC | Logic voltage input (1.8V to VDD). |
| 3 | GND | Ground connection. |
| 4 | SCL | I2C clock line. Connect to the microcontroller's I2C clock pin. |
| 5 | SDA | I2C data line. Connect to the microcontroller's I2C data pin. |
| 6 | AD0 | I2C address select. Connect to GND (address 0x68) or VDD (address 0x69). |
| 7 | INT | Interrupt output. Can be used to signal data availability or motion detection. |
| 8 | RESV | Reserved. Leave unconnected. |
Usage Instructions
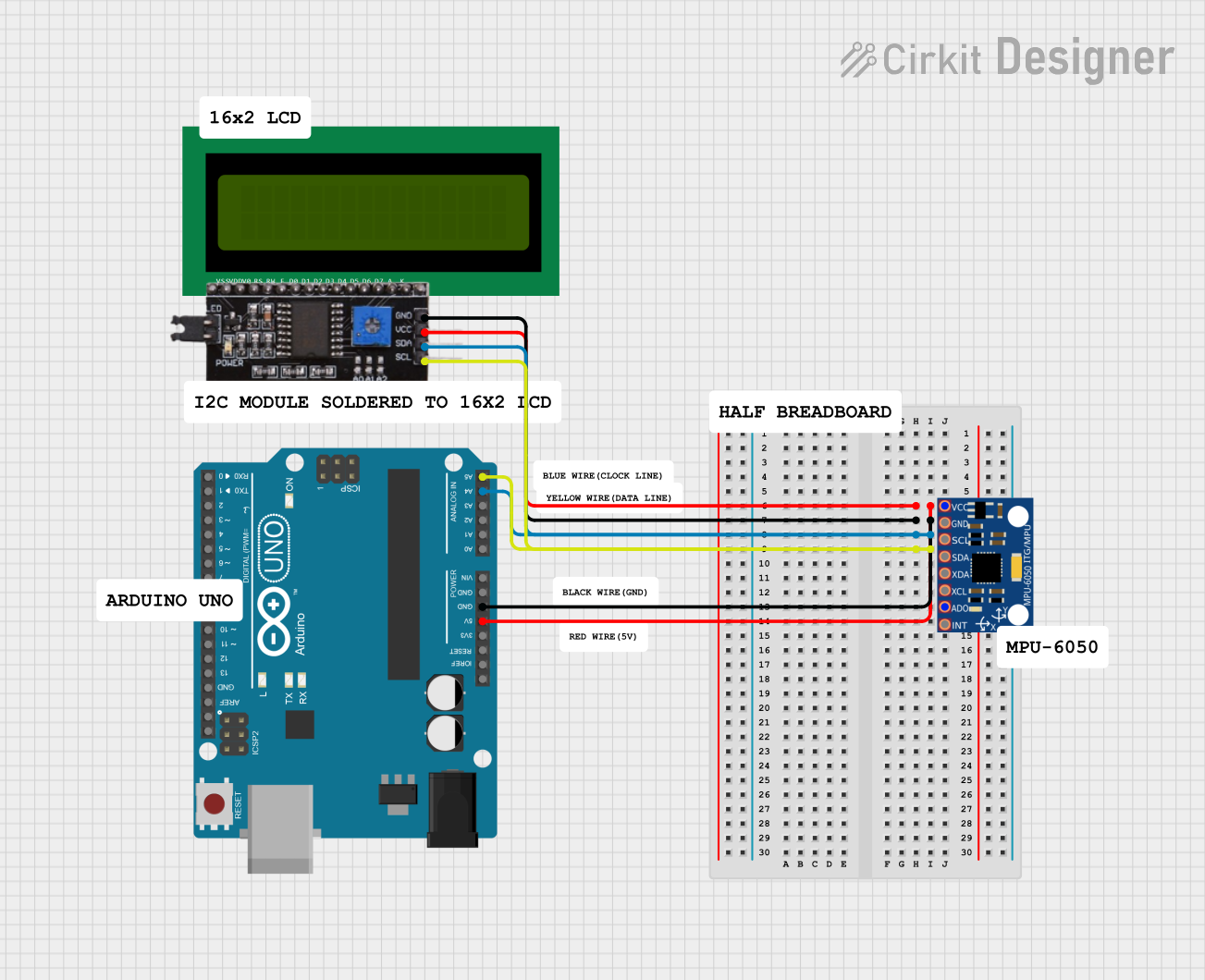
How to Use the MPU 6050 in a Circuit
- Power Supply: Connect the VDD pin to a 3.3V power source and the GND pin to ground. If your microcontroller operates at 5V logic, use a level shifter for the I2C lines.
- I2C Communication: Connect the SCL and SDA pins to the corresponding I2C pins on your microcontroller. Use pull-up resistors (typically 4.7kΩ) on both lines.
- Address Selection: Set the AD0 pin to GND for the default I2C address (0x68) or to VDD for the alternate address (0x69).
- Interrupt Pin: Optionally, connect the INT pin to a digital input on your microcontroller to handle interrupts.
Important Considerations and Best Practices
- Use decoupling capacitors (e.g., 0.1µF) near the VDD pin to reduce noise.
- Ensure proper pull-up resistors are used on the I2C lines for reliable communication.
- Avoid excessive vibrations or shocks to the sensor, as they may affect accuracy.
- Calibrate the sensor for your specific application to improve measurement accuracy.
Example Code for Arduino UNO
Below is an example of how to interface the MPU 6050 with an Arduino UNO using the I2C protocol:
#include <Wire.h>
// MPU 6050 I2C address (default is 0x68 when AD0 is connected to GND)
const int MPU_ADDR = 0x68;
// Variables to store raw accelerometer and gyroscope data
int16_t accelX, accelY, accelZ;
int16_t gyroX, gyroY, gyroZ;
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Wake up the MPU 6050 (it starts in sleep mode)
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6B); // Access the power management register
Wire.write(0); // Set to 0 to wake up the sensor
Wire.endTransmission();
}
void loop() {
// Request accelerometer and gyroscope data
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // Starting register for accelerometer data
Wire.endTransmission(false);
Wire.requestFrom(MPU_ADDR, 14, true); // Request 14 bytes of data
// Read accelerometer data
accelX = Wire.read() << 8 | Wire.read();
accelY = Wire.read() << 8 | Wire.read();
accelZ = Wire.read() << 8 | Wire.read();
// Skip temperature data (2 bytes)
Wire.read();
Wire.read();
// Read gyroscope data
gyroX = Wire.read() << 8 | Wire.read();
gyroY = Wire.read() << 8 | Wire.read();
gyroZ = Wire.read() << 8 | Wire.read();
// Print the data to the Serial Monitor
Serial.print("Accel X: "); Serial.print(accelX);
Serial.print(" | Accel Y: "); Serial.print(accelY);
Serial.print(" | Accel Z: "); Serial.println(accelZ);
Serial.print("Gyro X: "); Serial.print(gyroX);
Serial.print(" | Gyro Y: "); Serial.print(gyroY);
Serial.print(" | Gyro Z: "); Serial.println(gyroZ);
delay(500); // Wait for 500ms before the next reading
}
Troubleshooting and FAQs
Common Issues and Solutions
No Data or Incorrect Readings:
- Ensure the MPU 6050 is properly powered and connected to the microcontroller.
- Verify the I2C address (0x68 or 0x69) matches your configuration.
- Check for proper pull-up resistors on the I2C lines.
I2C Communication Errors:
- Confirm the SCL and SDA lines are correctly connected.
- Use a logic level shifter if your microcontroller operates at 5V logic.
Inconsistent or Noisy Data:
- Calibrate the sensor to account for offsets and scaling factors.
- Minimize vibrations and external interference.
Interrupt Pin Not Working:
- Ensure the INT pin is connected to a digital input on the microcontroller.
- Configure the interrupt settings in the MPU 6050 registers.
FAQs
Q: Can the MPU 6050 be used with a 5V microcontroller?
A: Yes, but you must use a logic level shifter for the I2C lines, as the MPU 6050 operates at 3.3V logic.
Q: How do I calibrate the MPU 6050?
A: Calibration involves determining and compensating for offsets in the accelerometer and gyroscope readings. This can be done in software by averaging multiple readings when the sensor is stationary.
Q: What is the maximum sampling rate of the MPU 6050?
A: The MPU 6050 supports a maximum sampling rate of 1kHz for both the accelerometer and gyroscope.
Q: Can I use the MPU 6050 for tilt detection?
A: Yes, the accelerometer data can be used to calculate tilt angles relative to the Earth's gravity.