How to Use SLT 25A 2-in-1 ESC: Examples, Pinouts, and Specs

Introduction
The SLT 25A 2-in-1 ESC by Spektrum is a compact and efficient electronic speed controller designed for controlling two brushless motors simultaneously. This dual-channel ESC is ideal for RC vehicles, such as cars, trucks, and boats, where precise throttle control and efficient power management are critical. Its integrated design reduces wiring complexity and saves space, making it a popular choice for hobbyists and professionals alike.
Explore Projects Built with SLT 25A 2-in-1 ESC
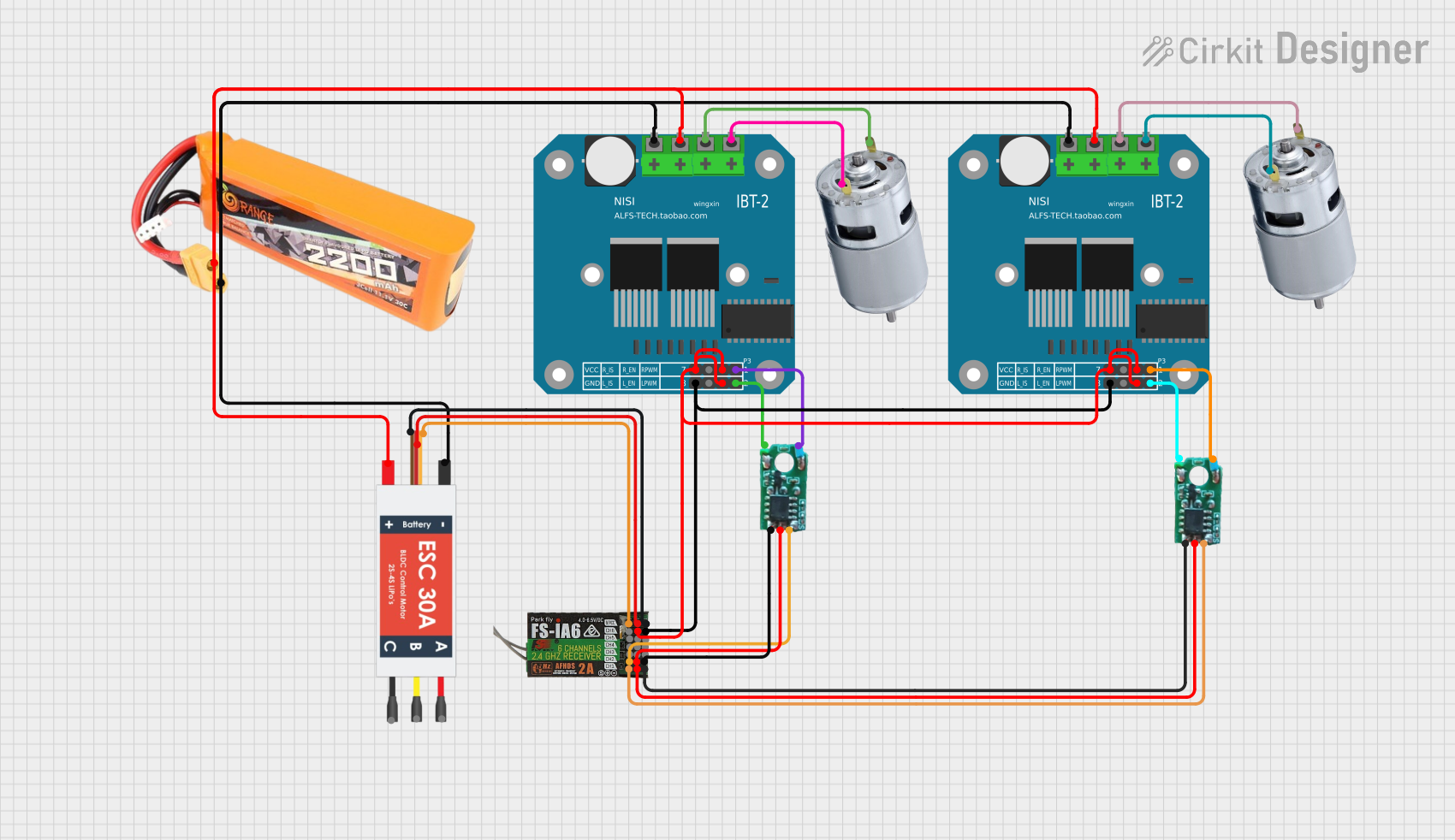


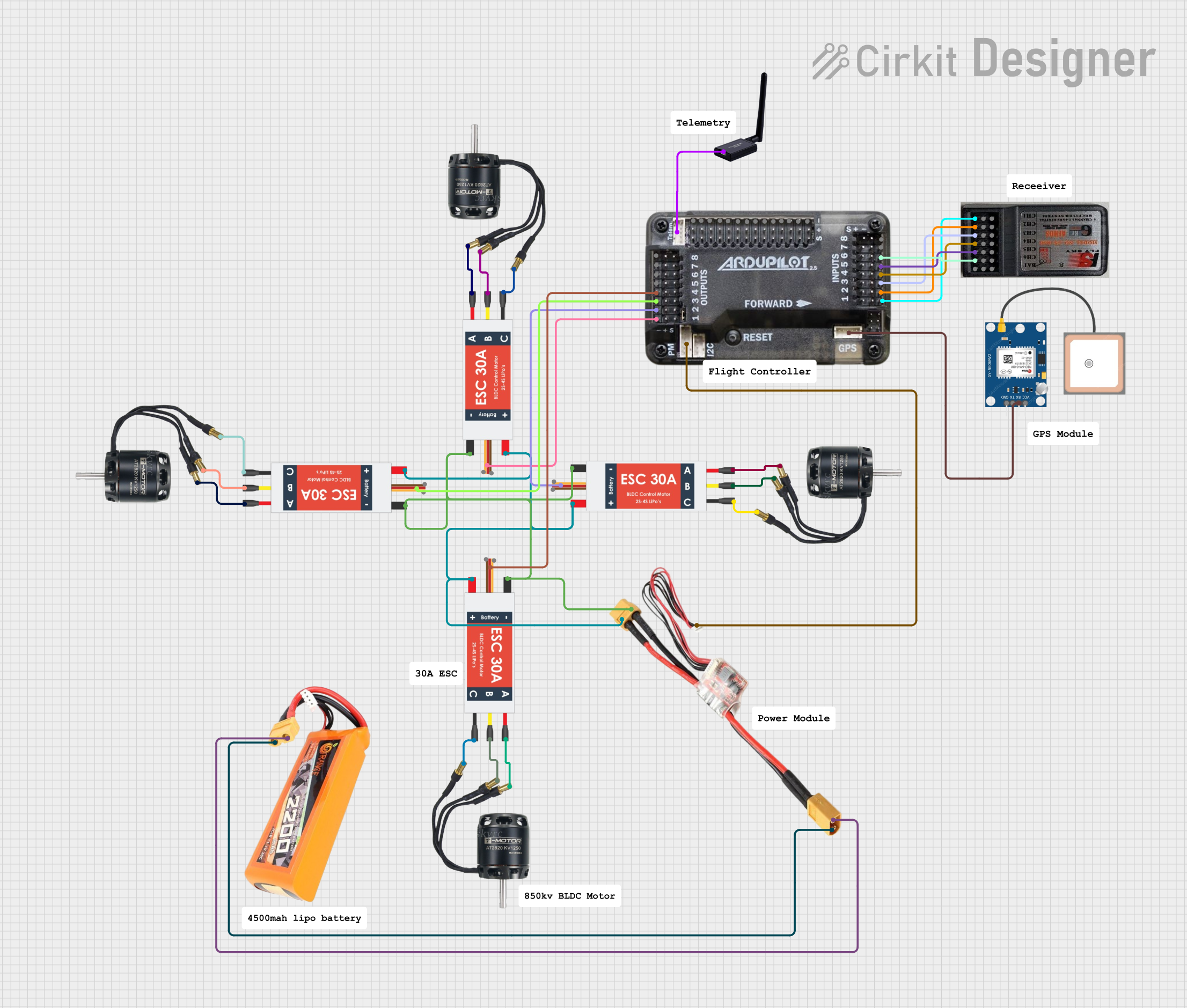
Explore Projects Built with SLT 25A 2-in-1 ESC
Common Applications
- RC cars and trucks requiring dual-motor control
- RC boats with twin-motor setups
- Robotics projects needing compact dual ESC functionality
- Custom RC vehicle builds with space constraints
Technical Specifications
The following table outlines the key technical details of the SLT 25A 2-in-1 ESC:
| Specification | Details |
|---|---|
| Manufacturer | Spektrum |
| Model | SLT 25A 2-in-1 ESC |
| Continuous Current Rating | 25A per channel |
| Peak Current Rating | 50A per channel (short bursts) |
| Input Voltage Range | 2S–3S LiPo (7.4V–11.1V) |
| Motor Compatibility | Brushless motors (sensorless) |
| BEC Output | 5V, 2A |
| Dimensions | 45mm x 30mm x 12mm |
| Weight | 35g |
| Operating Temperature | -10°C to 60°C |
| Throttle Signal Input | PWM (Pulse Width Modulation) |
Pin Configuration and Descriptions
The SLT 25A 2-in-1 ESC features the following connections:
| Pin/Connector | Description |
|---|---|
| Battery Input (XT60) | Connects to the LiPo battery (2S–3S) |
| Motor Output A (3 wires) | Connects to the first brushless motor |
| Motor Output B (3 wires) | Connects to the second brushless motor |
| Throttle Input A (PWM) | Receives throttle signal for Motor A from receiver |
| Throttle Input B (PWM) | Receives throttle signal for Motor B from receiver |
| BEC Output (2 wires) | Provides 5V power to the receiver or other devices |
Usage Instructions
How to Use the SLT 25A 2-in-1 ESC in a Circuit
- Connect the Battery: Use the XT60 connector to connect a 2S or 3S LiPo battery to the ESC.
- Connect the Motors: Attach the three wires from Motor A and Motor B to their respective outputs on the ESC. Ensure the wiring order matches the motor's specifications for correct rotation.
- Connect the Receiver: Plug the throttle signal wires (PWM) from the ESC into the corresponding channels on your RC receiver.
- Power the Receiver: The built-in BEC provides 5V power to the receiver, eliminating the need for an external power source.
- Calibrate the ESC: Follow the calibration procedure in the ESC's manual to ensure proper throttle response.
- Test the Setup: Gradually increase the throttle to verify motor operation and direction. Swap any two motor wires if the rotation is incorrect.
Important Considerations and Best Practices
- Battery Selection: Use only 2S or 3S LiPo batteries within the specified voltage range.
- Cooling: Ensure adequate airflow around the ESC to prevent overheating during operation.
- Wiring: Keep wires as short as possible to minimize resistance and interference.
- Throttle Calibration: Always calibrate the ESC with your transmitter before first use to ensure smooth throttle response.
- Motor Compatibility: This ESC is designed for sensorless brushless motors only. Do not use it with brushed or sensored motors.
Example Code for Arduino UNO
If you are using the SLT 25A 2-in-1 ESC with an Arduino UNO for a robotics project, you can control the throttle using the Servo library. Below is an example code snippet:
#include <Servo.h>
// Create Servo objects for the two ESC channels
Servo escA; // ESC for Motor A
Servo escB; // ESC for Motor B
void setup() {
// Attach ESC signal wires to Arduino pins
escA.attach(9); // Connect ESC A signal wire to pin 9
escB.attach(10); // Connect ESC B signal wire to pin 10
// Initialize ESCs with a neutral throttle signal (1000–2000 µs range)
escA.writeMicroseconds(1500); // Neutral throttle for Motor A
escB.writeMicroseconds(1500); // Neutral throttle for Motor B
delay(2000); // Wait for ESCs to initialize
}
void loop() {
// Example: Gradually increase throttle for both motors
for (int throttle = 1500; throttle <= 2000; throttle += 10) {
escA.writeMicroseconds(throttle); // Increase Motor A throttle
escB.writeMicroseconds(throttle); // Increase Motor B throttle
delay(50); // Small delay for smooth acceleration
}
// Example: Gradually decrease throttle for both motors
for (int throttle = 2000; throttle >= 1500; throttle -= 10) {
escA.writeMicroseconds(throttle); // Decrease Motor A throttle
escB.writeMicroseconds(throttle); // Decrease Motor B throttle
delay(50); // Small delay for smooth deceleration
}
}
Troubleshooting and FAQs
Common Issues and Solutions
Motors Not Spinning
- Cause: Incorrect wiring or throttle signal not received.
- Solution: Verify motor connections and ensure the ESC is properly connected to the receiver.
Motor Spins in the Wrong Direction
- Cause: Motor wires are connected in the wrong order.
- Solution: Swap any two of the three motor wires to reverse the direction.
ESC Overheating
- Cause: Insufficient cooling or excessive current draw.
- Solution: Ensure proper airflow and verify that the motors and battery are within the ESC's specifications.
No Power to Receiver
- Cause: BEC output not functioning or disconnected.
- Solution: Check the BEC wiring and ensure the ESC is powered by a compatible battery.
Throttle Calibration Issues
- Cause: Incorrect calibration procedure.
- Solution: Follow the calibration steps in the ESC's manual and ensure the transmitter is set to neutral throttle before starting.
FAQs
Can I use this ESC with brushed motors? No, the SLT 25A 2-in-1 ESC is designed specifically for sensorless brushless motors.
What happens if I use a battery outside the specified voltage range? Using an incompatible battery may damage the ESC or cause it to malfunction. Always use a 2S or 3S LiPo battery.
Can I control the ESC with a microcontroller other than Arduino? Yes, any microcontroller capable of generating PWM signals (e.g., Raspberry Pi, ESP32) can control the ESC.
Is the ESC waterproof? The SLT 25A 2-in-1 ESC is not waterproof. Avoid exposing it to water or moisture.
What is the maximum motor size this ESC can handle? The ESC can handle motors with a continuous current draw of up to 25A per channel. Ensure your motor specifications are within this limit.