How to Use brushless esc: Examples, Pinouts, and Specs

Introduction
A Brushless Electronic Speed Controller (ESC) is a critical component used to regulate the speed, direction, and braking of brushless motors. It achieves this by converting direct current (DC) from a power source into a three-phase alternating current (AC) to drive the motor. Brushless ESCs are widely used in applications requiring precise motor control, such as drones, remote-controlled (RC) vehicles, electric skateboards, and robotics.
Explore Projects Built with brushless esc


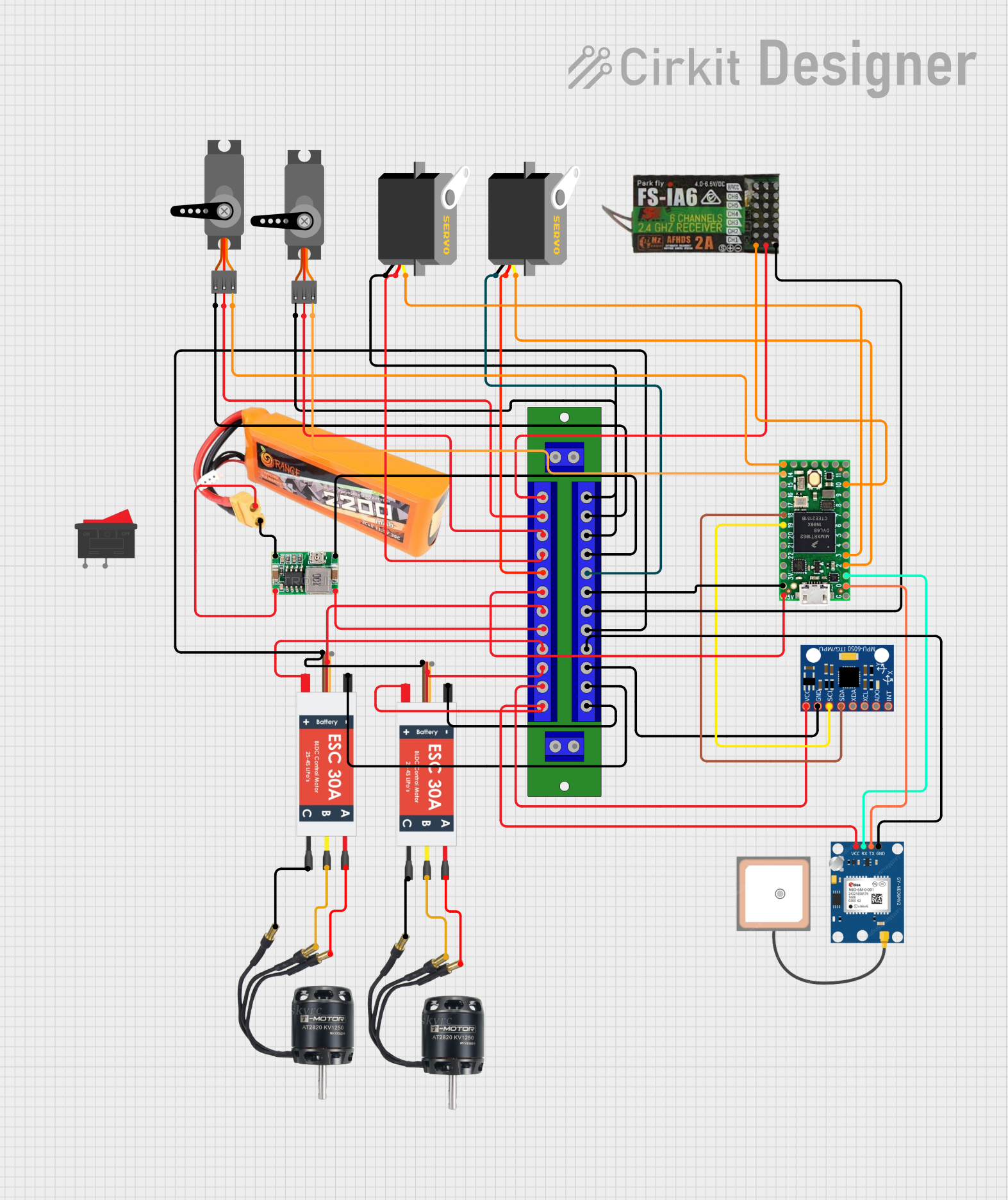
Explore Projects Built with brushless esc
Common Applications:
- Drones and quadcopters for motor speed control
- RC cars, boats, and airplanes
- Electric bicycles and skateboards
- Industrial automation and robotics
Technical Specifications
Below are the general technical specifications for a typical brushless ESC. Note that specific values may vary depending on the model and manufacturer.
Key Technical Details:
- Input Voltage Range: 6V to 50V (commonly 2S to 12S LiPo batteries)
- Continuous Current Rating: 10A to 200A (depending on the model)
- Peak Current Rating: Typically 1.5x to 2x the continuous current rating
- Supported Motor Types: Brushless DC (BLDC) motors
- Control Signal Input: PWM (Pulse Width Modulation) signal, typically 1ms to 2ms pulse width
- BEC (Battery Eliminator Circuit): 5V or 6V output for powering external devices (optional, depending on the ESC)
- Operating Temperature: -20°C to 85°C (varies by model)
- Weight: 10g to 100g (depending on size and power rating)
Pin Configuration and Descriptions
The pin configuration of a brushless ESC typically includes the following connections:
| Pin Name | Description |
|---|---|
| Power Input (+) | Positive terminal for the power source (e.g., battery). |
| Power Input (-) | Negative terminal for the power source (e.g., battery). |
| Motor Phase A | First phase connection to the brushless motor. |
| Motor Phase B | Second phase connection to the brushless motor. |
| Motor Phase C | Third phase connection to the brushless motor. |
| Signal Input | PWM signal input from the flight controller, RC receiver, or microcontroller. |
| Ground (GND) | Ground connection for the signal input. |
| BEC Output (+) | Optional 5V or 6V output for powering external devices (e.g., microcontroller). |
| BEC Output (-) | Ground connection for the BEC output. |
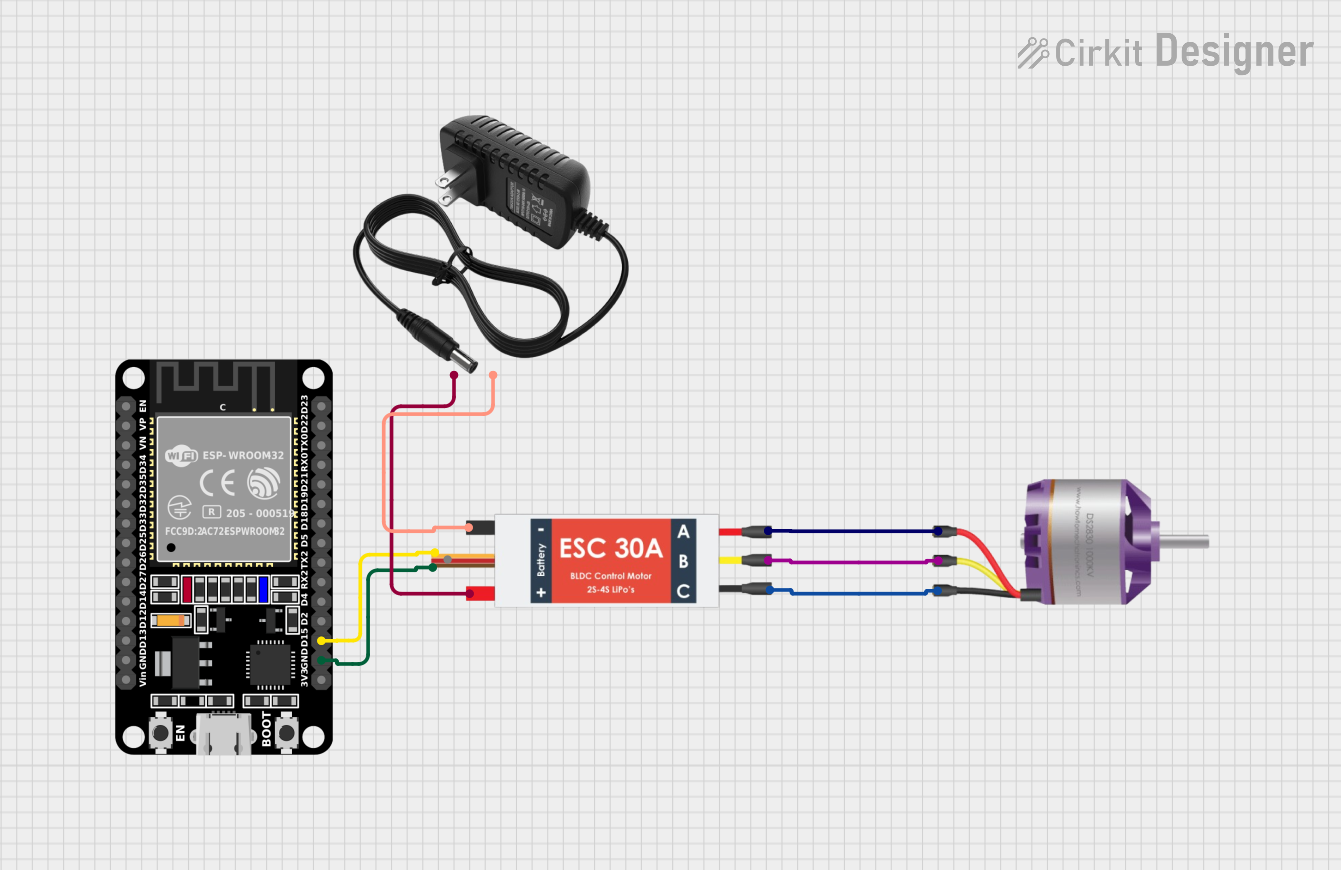
Usage Instructions
How to Use a Brushless ESC in a Circuit:
Connect the Power Source:
- Connect the positive and negative terminals of the battery to the ESC's power input pins.
- Ensure the battery voltage is within the ESC's supported range.
Connect the Motor:
- Attach the three motor phase wires (A, B, C) from the ESC to the corresponding wires of the brushless motor.
- If the motor spins in the wrong direction, swap any two of the motor phase wires.
Connect the Signal Input:
- Connect the PWM signal input pin of the ESC to the signal output pin of a flight controller, RC receiver, or microcontroller.
- Connect the ESC's signal ground (GND) to the ground of the controlling device.
Optional: Use the BEC Output:
- If the ESC has a built-in BEC, use the BEC output to power external devices like a microcontroller or RC receiver.
Calibrate the ESC:
- Follow the manufacturer's instructions to calibrate the ESC for the throttle range of your controller.
Test the Setup:
- Power on the system and test the motor's response to the control signals. Ensure smooth operation.
Important Considerations and Best Practices:
- Cooling: Ensure proper ventilation or cooling for the ESC, especially in high-current applications.
- Battery Compatibility: Use a battery with the correct voltage and discharge rating to avoid damaging the ESC.
- Signal Quality: Use a clean and stable PWM signal to prevent erratic motor behavior.
- Safety: Always disconnect the power source when making wiring changes to avoid short circuits or accidental motor starts.
Example: Using a Brushless ESC with Arduino UNO
Below is an example of controlling a brushless ESC using an Arduino UNO:
#include <Servo.h> // Include the Servo library to generate PWM signals
Servo esc; // Create a Servo object to control the ESC
void setup() {
esc.attach(9); // Attach the ESC signal wire to pin 9 on the Arduino
esc.writeMicroseconds(1000); // Set the ESC to its minimum throttle (1ms pulse)
delay(2000); // Wait for 2 seconds to allow the ESC to initialize
}
void loop() {
esc.writeMicroseconds(1500); // Set the throttle to 50% (1.5ms pulse)
delay(5000); // Run the motor at 50% throttle for 5 seconds
esc.writeMicroseconds(1000); // Set the throttle to 0% (1ms pulse)
delay(5000); // Stop the motor for 5 seconds
}
Note: Always refer to the ESC's manual for specific initialization and calibration procedures.
Troubleshooting and FAQs
Common Issues and Solutions:
Motor Does Not Spin:
- Cause: Incorrect wiring or uncalibrated ESC.
- Solution: Verify all connections and calibrate the ESC as per the manufacturer's instructions.
Motor Spins in the Wrong Direction:
- Cause: Incorrect motor phase wiring.
- Solution: Swap any two of the motor phase wires to reverse the direction.
ESC Overheats:
- Cause: Insufficient cooling or excessive current draw.
- Solution: Improve ventilation or use an ESC with a higher current rating.
Erratic Motor Behavior:
- Cause: Poor signal quality or electrical noise.
- Solution: Use shielded cables for the signal wire and ensure a stable power supply.
No Power to External Devices via BEC:
- Cause: BEC is not enabled or is damaged.
- Solution: Check the ESC's specifications and ensure the BEC is functional.
FAQs:
Q: Can I use a brushless ESC with a brushed motor?
A: No, brushless ESCs are specifically designed for brushless motors and are not compatible with brushed motors.Q: How do I choose the right ESC for my motor?
A: Match the ESC's current rating and voltage range to the motor's specifications. Ensure the ESC can handle the peak current draw of the motor.Q: Can I use a single ESC to control multiple motors?
A: No, each brushless motor requires its own ESC for independent control.Q: What happens if I exceed the ESC's voltage rating?
A: Exceeding the voltage rating can damage the ESC and potentially cause it to fail.
By following this documentation, you can effectively use a brushless ESC in your projects and troubleshoot common issues.