How to Use StepperDriver: Examples, Pinouts, and Specs

Introduction
The StepperOnline ISDT23-45 Stepper Driver is an advanced electronic device designed to control the operation of stepper motors. It works by sending precise electrical pulses to the motor's coils, enabling accurate positioning, speed control, and smooth motion. This driver is ideal for applications requiring high precision and reliability, such as CNC machines, 3D printers, robotics, and automated systems.
Explore Projects Built with StepperDriver
Explore Projects Built with StepperDriver
Common Applications and Use Cases
- CNC machines for precise cutting and milling
- 3D printers for accurate layer deposition
- Robotics for controlled movement and positioning
- Conveyor systems in industrial automation
- Camera sliders and gimbals for smooth motion control
Technical Specifications
The ISDT23-45 Stepper Driver is designed to work with a wide range of stepper motors, offering flexibility and performance. Below are the key technical details:
General Specifications
| Parameter | Value |
|---|---|
| Manufacturer | StepperOnline |
| Part ID | ISDT23-45 |
| Input Voltage Range | 20V - 50V DC |
| Output Current Range | 1.0A - 4.5A |
| Microstepping Options | Full step to 1/256 step |
| Control Signal Voltage | 3.3V - 5V |
| Operating Temperature | -10°C to +50°C |
| Dimensions | 118mm x 75mm x 34mm |
Pin Configuration and Descriptions
The ISDT23-45 Stepper Driver features a set of input and output pins for motor control and power connections. Below is the pin configuration:
Power and Motor Connections
| Pin Name | Description |
|---|---|
| V+ | Positive DC power input (20V - 50V) |
| GND | Ground connection for power input |
| A+ | Motor coil A positive terminal |
| A- | Motor coil A negative terminal |
| B+ | Motor coil B positive terminal |
| B- | Motor coil B negative terminal |
Control Signal Connections
| Pin Name | Description |
|---|---|
| PUL+ | Pulse signal input (step control) |
| PUL- | Pulse signal ground |
| DIR+ | Direction control signal input |
| DIR- | Direction control signal ground |
| ENA+ | Enable signal input (optional) |
| ENA- | Enable signal ground (optional) |
Usage Instructions
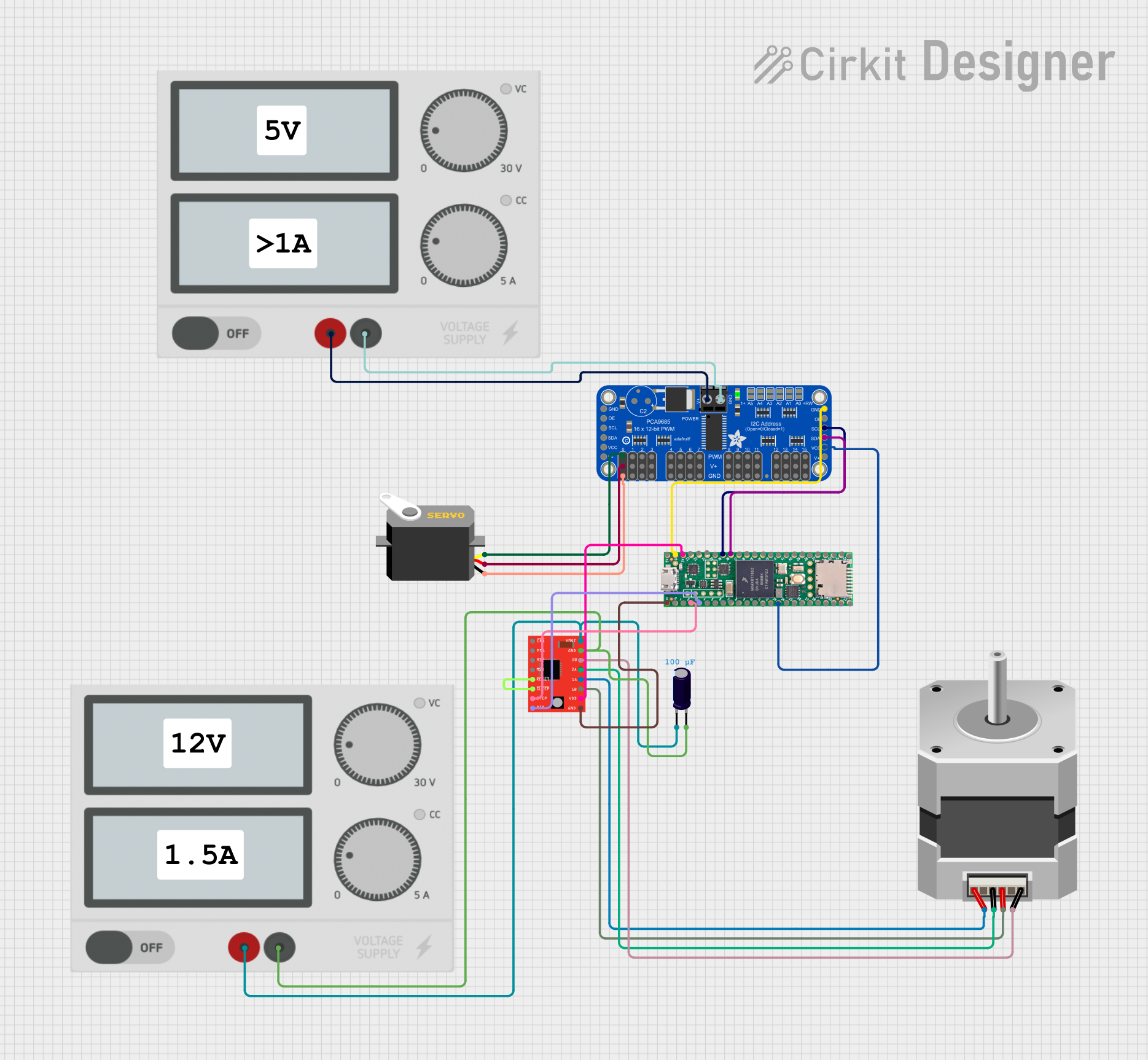
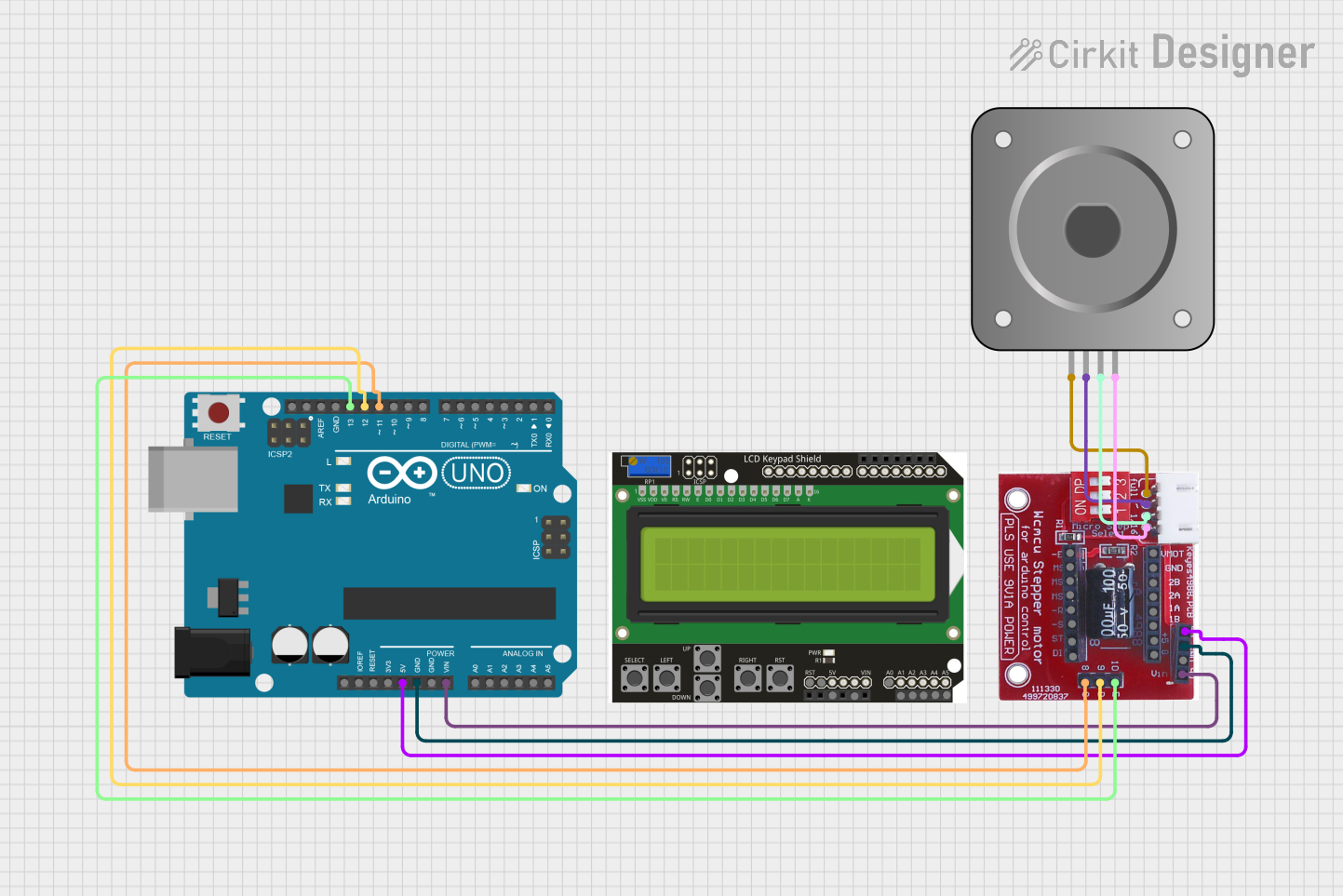
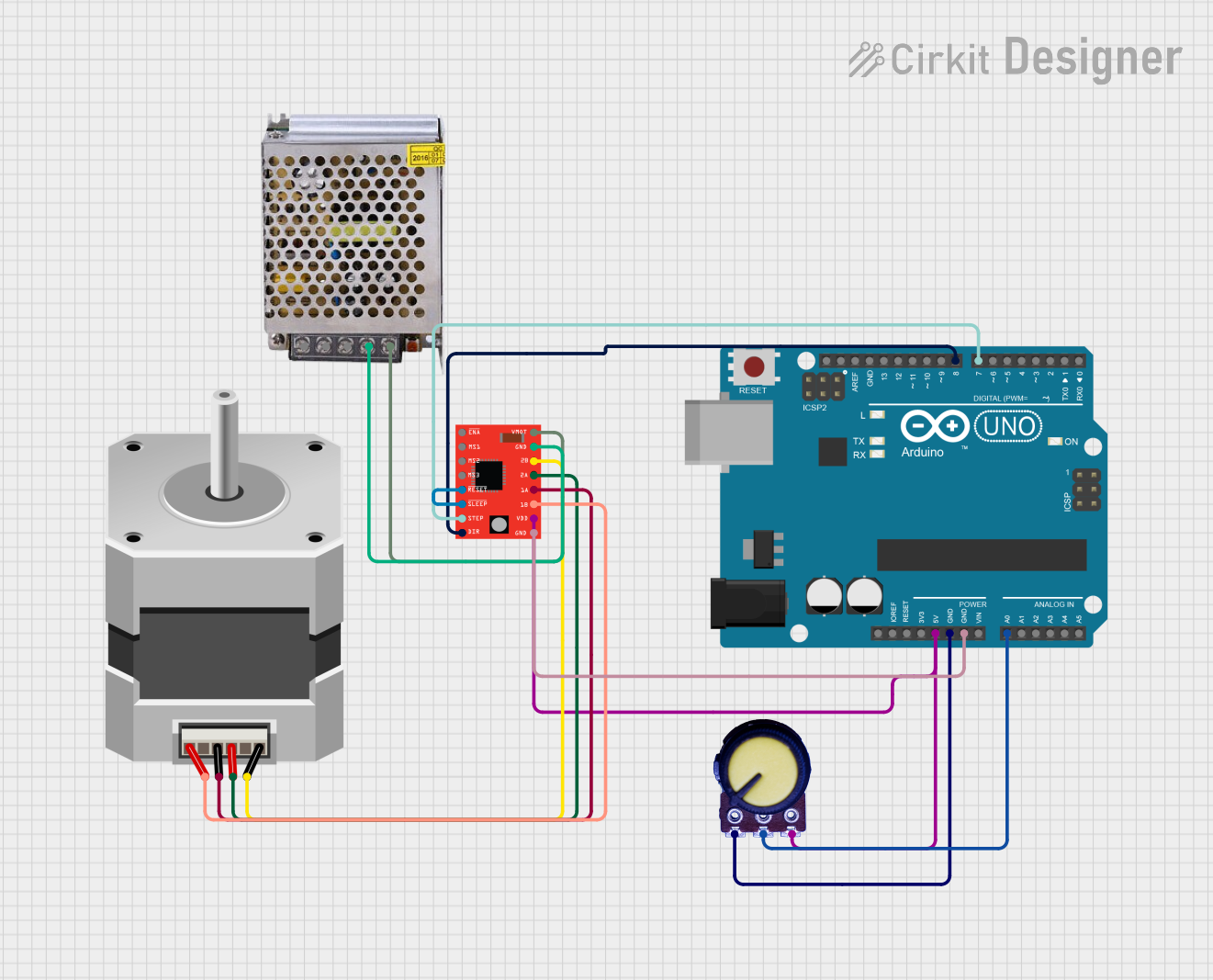
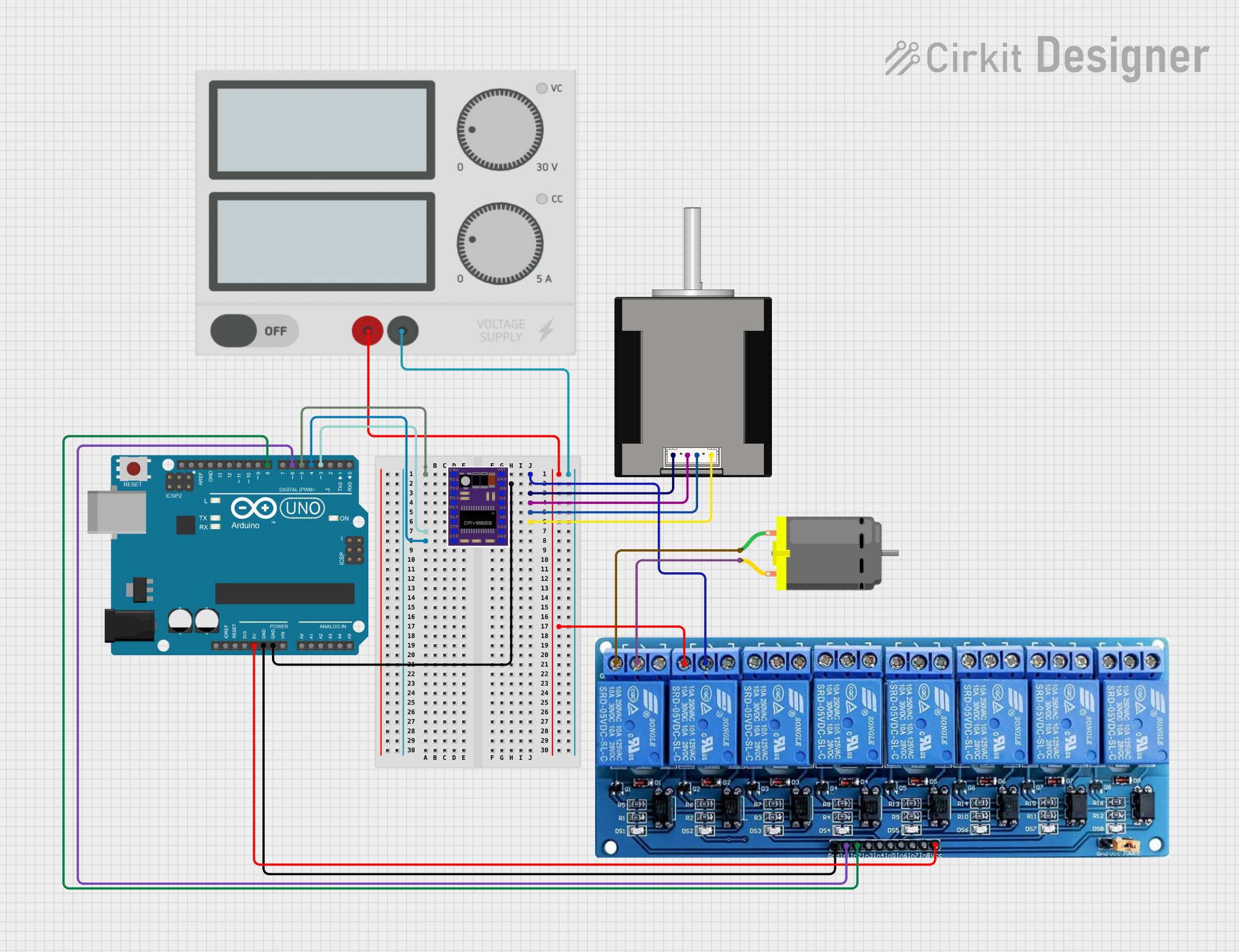
How to Use the Component in a Circuit
- Power Supply: Connect a DC power supply (20V - 50V) to the
V+andGNDpins. Ensure the power supply can provide sufficient current for the motor. - Motor Connection: Connect the stepper motor's coils to the
A+,A-,B+, andB-pins. Refer to the motor's datasheet for coil identification. - Control Signals: Connect the
PUL+,DIR+, andENA+pins to a microcontroller or control board (e.g., Arduino UNO). Connect the corresponding ground pins (PUL-,DIR-,ENA-) to the microcontroller's ground. - Microstepping Configuration: Set the microstepping mode using the DIP switches on the driver. Refer to the user manual for specific switch settings.
- Testing: Power on the system and send pulse signals to the
PUL+pin to control the motor's steps. Use theDIR+pin to change the motor's direction.
Important Considerations and Best Practices
- Current Setting: Adjust the output current using the DIP switches to match the motor's rated current. Overdriving the motor can cause overheating or damage.
- Signal Voltage: Ensure the control signals are within the 3.3V - 5V range to avoid damage to the driver.
- Cooling: Provide adequate ventilation or a heatsink to prevent the driver from overheating during operation.
- Wiring: Double-check all connections before powering on the system to avoid short circuits or incorrect wiring.
Example Code for Arduino UNO
Below is an example code snippet to control a stepper motor using the ISDT23-45 Stepper Driver and an Arduino UNO:
// Define control pins
const int stepPin = 3; // Connect to PUL+ on the driver
const int dirPin = 4; // Connect to DIR+ on the driver
void setup() {
pinMode(stepPin, OUTPUT); // Set step pin as output
pinMode(dirPin, OUTPUT); // Set direction pin as output
digitalWrite(dirPin, HIGH); // Set initial direction (HIGH or LOW)
}
void loop() {
// Generate step pulses
for (int i = 0; i < 200; i++) { // 200 steps for one revolution (example)
digitalWrite(stepPin, HIGH); // Send HIGH pulse
delayMicroseconds(500); // Pulse duration (adjust for speed)
digitalWrite(stepPin, LOW); // Send LOW pulse
delayMicroseconds(500); // Delay between pulses
}
delay(1000); // Wait 1 second before changing direction
// Change direction
digitalWrite(dirPin, !digitalRead(dirPin)); // Toggle direction
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving:
- Check the power supply voltage and current rating.
- Verify the motor connections to the driver.
- Ensure the control signals are being sent correctly.
Motor Vibrates but Does Not Rotate:
- Check the wiring of the motor coils. Incorrect wiring can cause this issue.
- Verify the microstepping settings on the DIP switches.
Driver Overheating:
- Ensure proper ventilation or use a heatsink.
- Reduce the output current setting if it exceeds the motor's rated current.
Inconsistent Motor Movement:
- Check for noise or interference in the control signal lines.
- Use shielded cables for long signal connections.
FAQs
Q: Can I use a 12V power supply with the ISDT23-45?
A: No, the minimum input voltage is 20V. Using a lower voltage may damage the driver or result in improper operation.
Q: How do I determine the correct current setting for my motor?
A: Refer to your motor's datasheet for the rated current and set the DIP switches accordingly.
Q: Can I control multiple stepper motors with one ISDT23-45 driver?
A: No, each driver is designed to control a single stepper motor. Use separate drivers for multiple motors.
Q: Is the driver compatible with 1.8° and 0.9° stepper motors?
A: Yes, the driver supports both types of stepper motors. Adjust the microstepping settings as needed.