How to Use endstop mechanical limit switch ramps 1.4: Examples, Pinouts, and Specs
Introduction
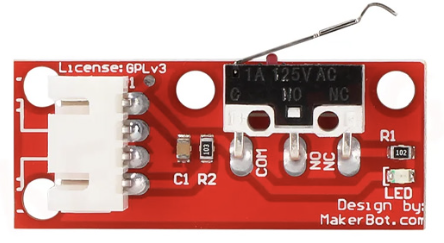
The Endstop Mechanical Limit Switch is a simple yet essential component used in 3D printers, CNC machines, and other automated systems. It is designed to detect the physical limits of motion for an axis, ensuring precise positioning and preventing mechanical damage. This component is commonly used with the RAMPS 1.4 board, which is a popular control board for 3D printers.
Explore Projects Built with endstop mechanical limit switch ramps 1.4
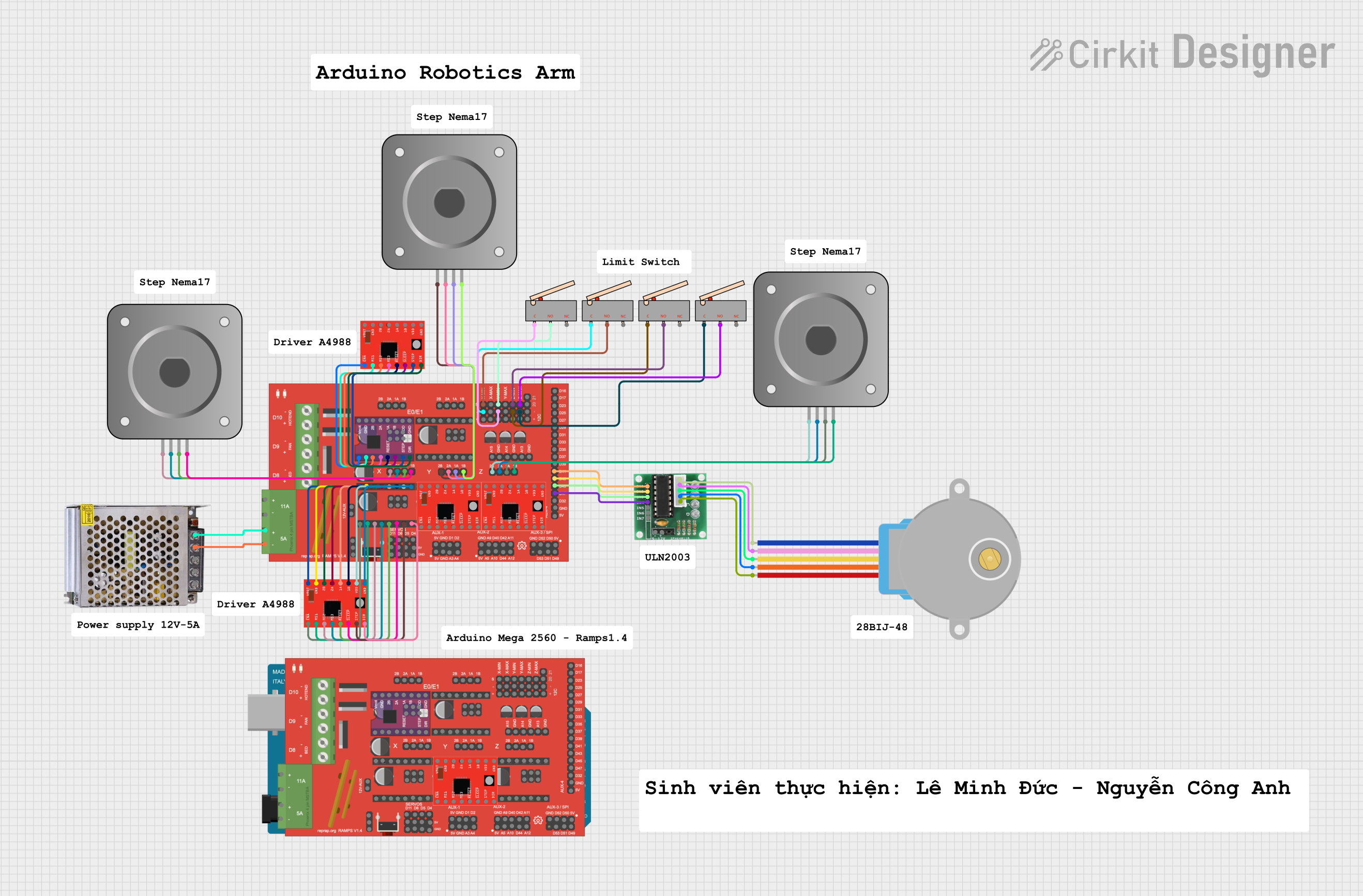
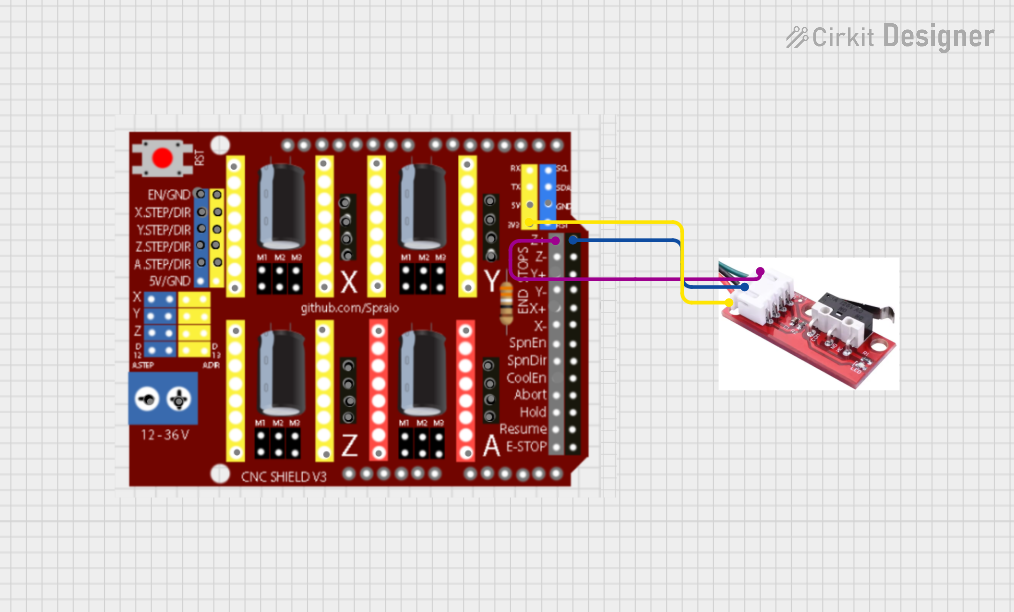
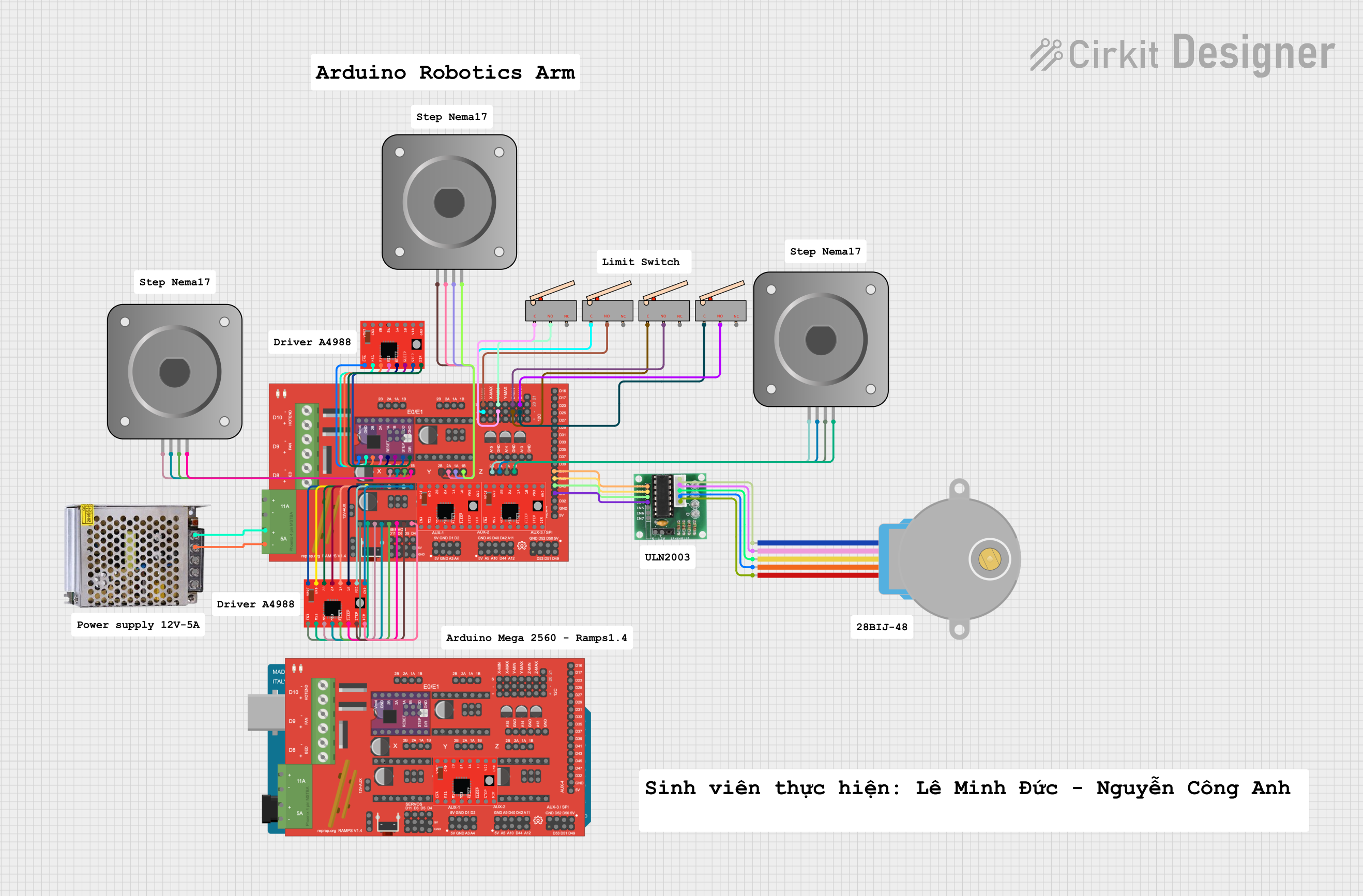
Explore Projects Built with endstop mechanical limit switch ramps 1.4
Common Applications and Use Cases
- 3D printers for detecting the home position of axes
- CNC machines for axis limit detection
- Robotics for motion boundary detection
- Any system requiring precise end-of-travel detection
Technical Specifications
- Operating Voltage: 5V DC
- Current Rating: 300mA (max)
- Switch Type: Normally Open (NO) or Normally Closed (NC)
- Connector Type: 3-pin Dupont (Signal, VCC, GND)
- Dimensions: 32mm x 10mm x 10mm (approx.)
- Cable Length: Typically 70cm (varies by manufacturer)
Pin Configuration and Descriptions
| Pin Name | Description |
|---|---|
| Signal | Outputs the state of the switch (HIGH or LOW) |
| VCC | Supplies 5V power to the switch |
| GND | Ground connection |
Usage Instructions
How to Use the Component in a Circuit
Wiring the Endstop to RAMPS 1.4:
- Connect the Signal pin of the endstop to the corresponding signal pin on the RAMPS 1.4 board.
- Connect the VCC pin to the 5V pin on the RAMPS 1.4 board.
- Connect the GND pin to the ground pin on the RAMPS 1.4 board.
Configuring the Firmware:
- In 3D printer firmware (e.g., Marlin), configure the endstop type (NO or NC) in the configuration file.
- Ensure the correct pin assignments for the endstop in the firmware.
Testing the Endstop:
- Power on the system and manually trigger the endstop by pressing the switch.
- Verify that the firmware detects the endstop activation (e.g., using the M119 command in Marlin).
Important Considerations and Best Practices
- Debouncing: Mechanical switches may produce noise or bouncing when activated. Use firmware settings or external capacitors to debounce the signal.
- Mounting: Securely mount the endstop to prevent misalignment or accidental triggering.
- Polarity: Ensure correct wiring of VCC and GND to avoid damage to the switch.
- Firmware Configuration: Double-check the firmware settings for the endstop type (NO or NC) to match the physical wiring.
Example Code for Arduino UNO
The following code demonstrates how to use the endstop with an Arduino UNO for basic testing:
// Define the pin connected to the endstop signal
const int endstopPin = 2;
// Variable to store the endstop state
int endstopState = 0;
void setup() {
// Initialize the endstop pin as an input with pullup resistor
pinMode(endstopPin, INPUT_PULLUP);
// Start the serial communication for debugging
Serial.begin(9600);
}
void loop() {
// Read the state of the endstop (LOW when pressed, HIGH when released)
endstopState = digitalRead(endstopPin);
// Print the state to the serial monitor
if (endstopState == LOW) {
Serial.println("Endstop triggered!");
} else {
Serial.println("Endstop not triggered.");
}
// Add a small delay to avoid flooding the serial monitor
delay(200);
}
Troubleshooting and FAQs
Common Issues and Solutions
Endstop Not Detected by Firmware:
- Solution: Check the wiring and ensure the signal pin is connected to the correct pin on the RAMPS 1.4 board. Verify the firmware configuration.
Endstop Always Triggered:
- Solution: Verify the NO/NC configuration in the firmware matches the physical wiring. Check for short circuits in the wiring.
Endstop Not Triggering Consistently:
- Solution: Ensure the switch is securely mounted and aligned with the moving part. Check for mechanical wear or damage to the switch.
Noise or False Triggers:
- Solution: Use a pullup resistor (if not already enabled) or add a small capacitor across the signal and ground pins to filter noise.
FAQs
Can I use this endstop with other control boards? Yes, the endstop is compatible with most control boards that support 5V logic levels.
What is the difference between NO and NC configurations? In NO (Normally Open) mode, the circuit is open until the switch is pressed. In NC (Normally Closed) mode, the circuit is closed until the switch is pressed.
How do I test the endstop without connecting it to a board? Use a multimeter to check continuity between the signal and ground pins. Pressing the switch should change the continuity state.
Can I extend the cable length? Yes, but ensure proper shielding to avoid signal interference, especially in noisy environments.
This documentation provides a comprehensive guide to using the Endstop Mechanical Limit Switch with RAMPS 1.4 and other compatible systems.