How to Use Annimos 24v 160 kg servo: Examples, Pinouts, and Specs

Introduction
The Annimos 24V 160 kg servo is a high-torque servo motor designed for applications requiring precise control and the ability to handle heavy loads. With a torque rating of up to 160 kg and a 24V operating voltage, this servo is ideal for robotics, industrial automation, and other demanding mechanical systems. Its robust design ensures reliability and durability, making it suitable for both professional and hobbyist projects.
Explore Projects Built with Annimos 24v 160 kg servo
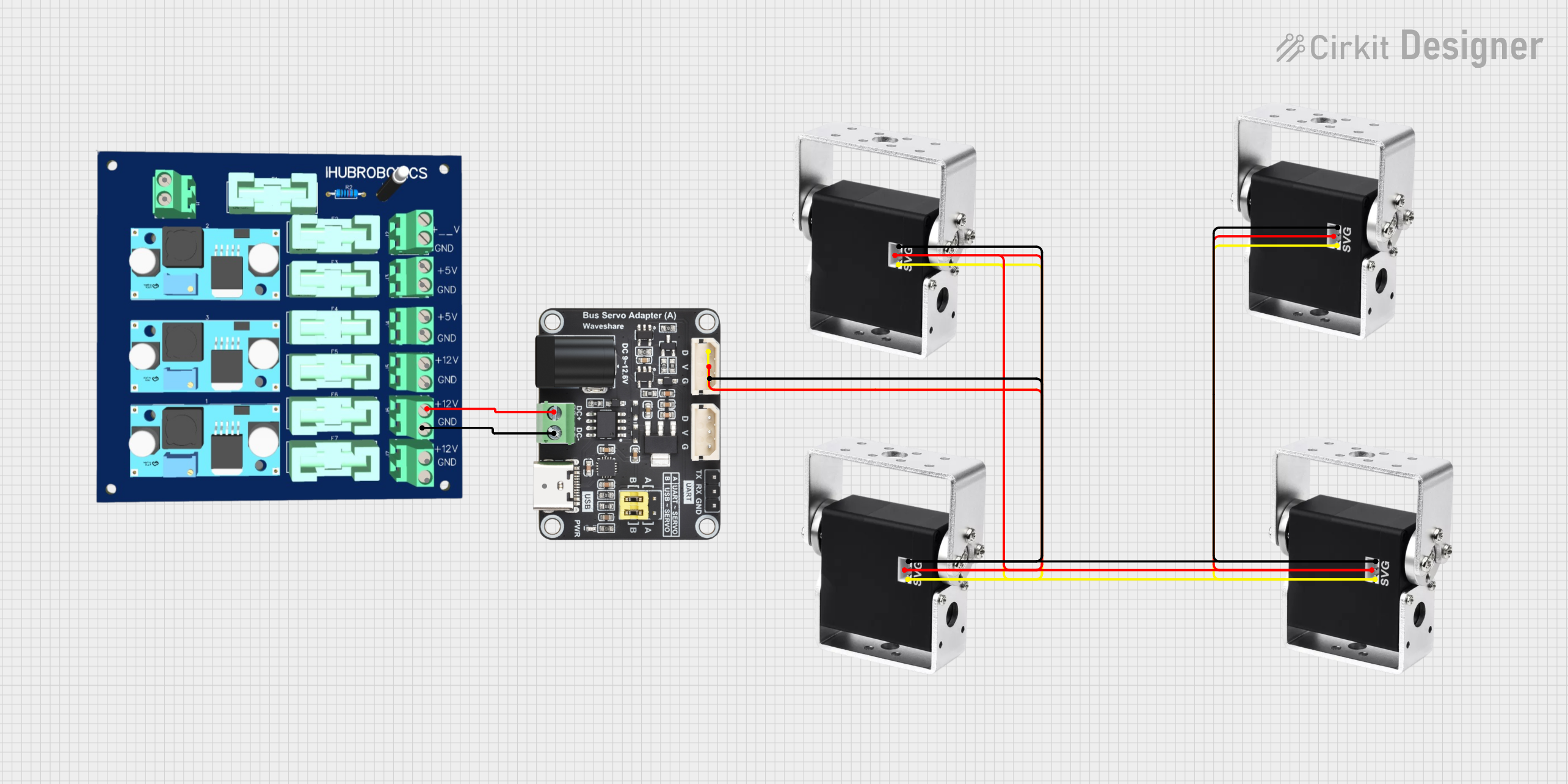
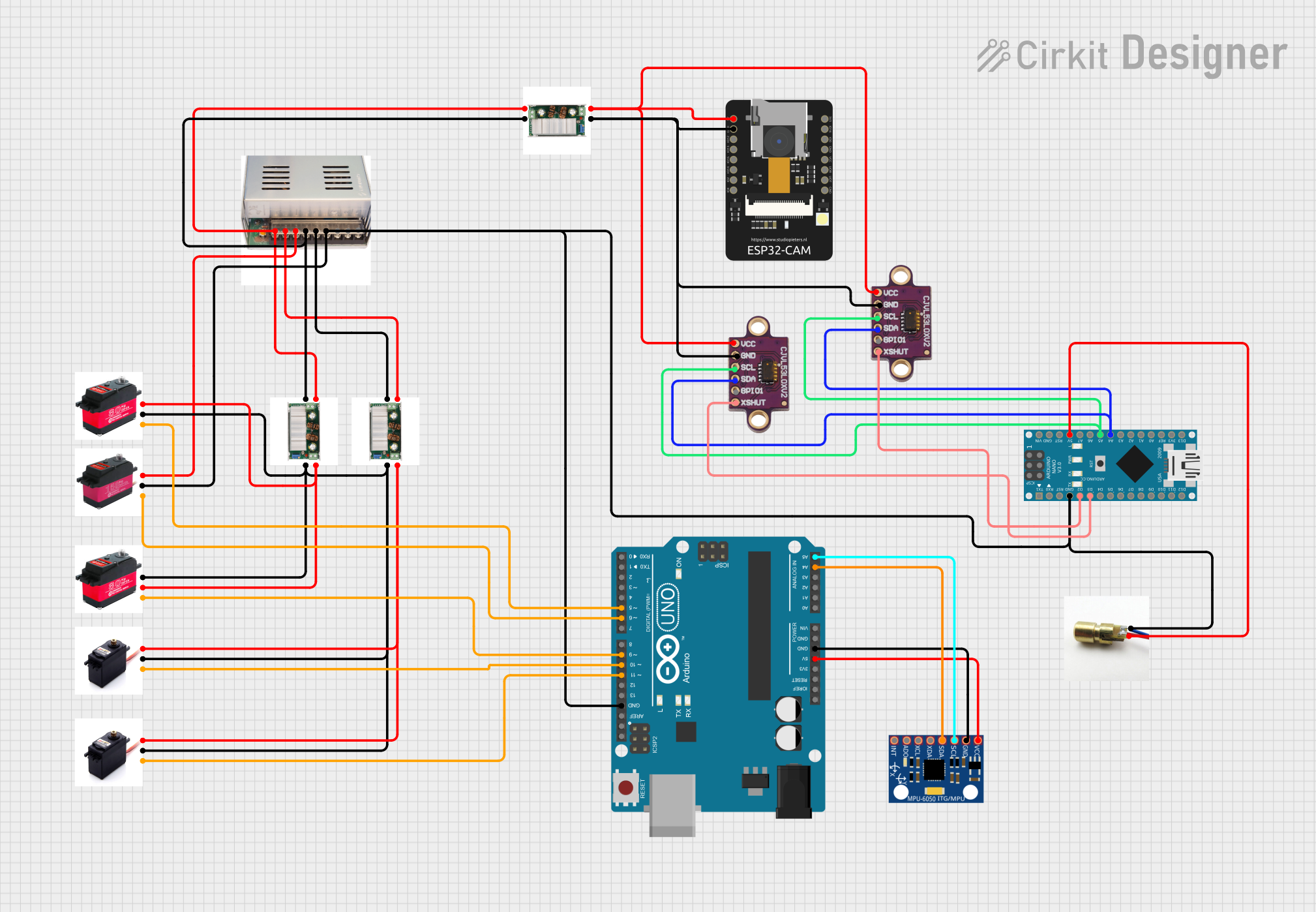
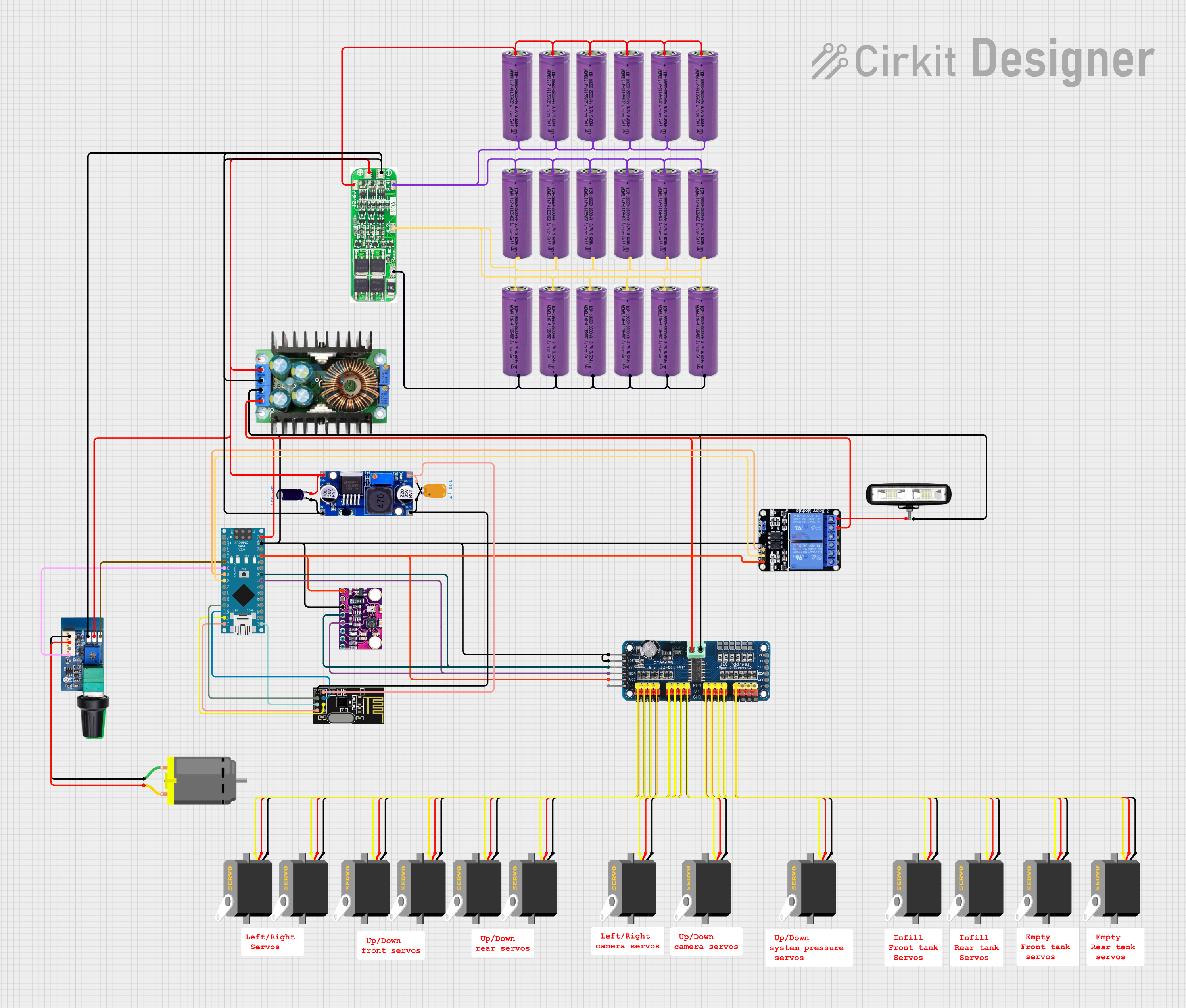
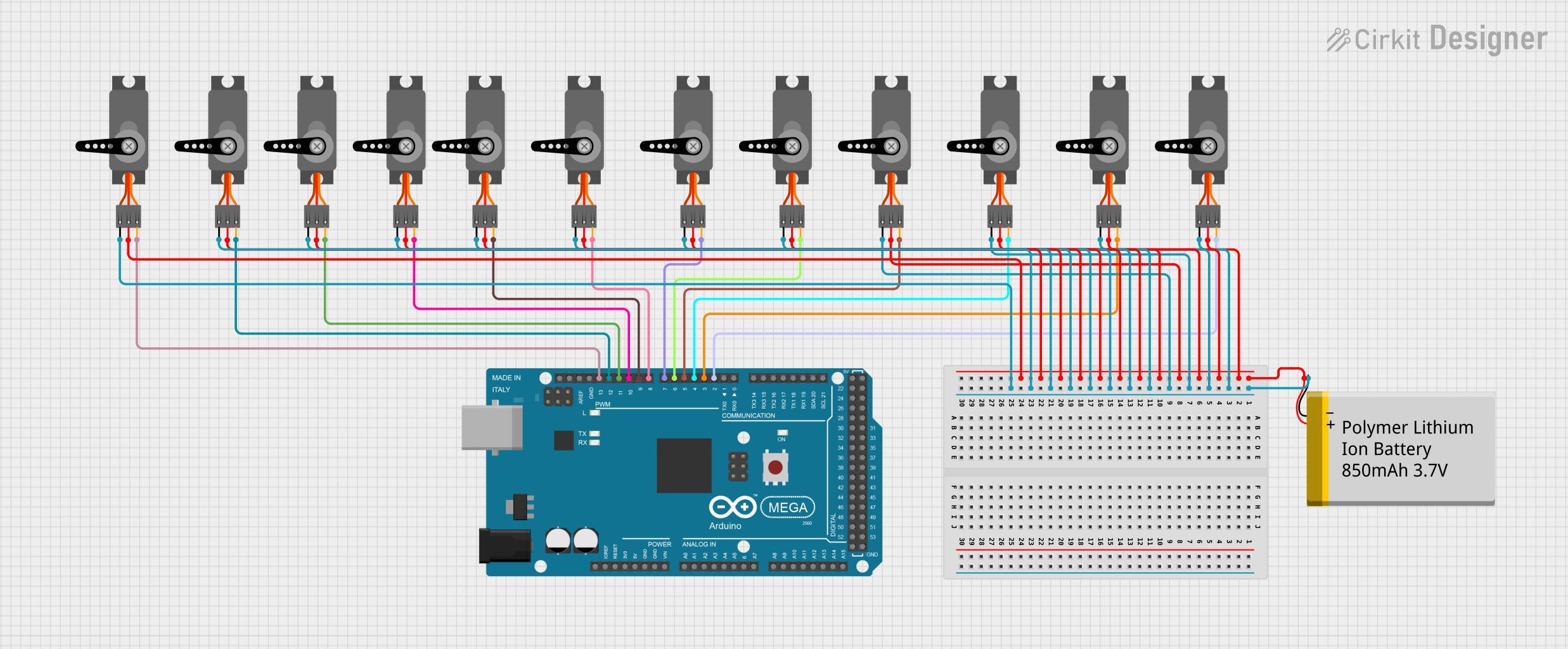
Explore Projects Built with Annimos 24v 160 kg servo
Common Applications
- Robotic arms and manipulators
- Industrial automation systems
- Remote-controlled vehicles and heavy-duty drones
- Precision positioning systems
- Automated machinery requiring high torque
Technical Specifications
Key Specifications
| Parameter | Value |
|---|---|
| Operating Voltage | 24V DC |
| Stall Torque | 160 kg·cm |
| Operating Speed | 0.15 sec/60° at 24V |
| Control Signal | PWM (Pulse Width Modulation) |
| PWM Pulse Range | 500 µs to 2500 µs |
| Angle Range | 0° to 180° |
| Gear Material | Metal |
| Motor Type | Coreless |
| Operating Temperature | -10°C to 50°C |
| Weight | ~500 g |
Pin Configuration
The Annimos 24V 160 kg servo typically comes with a 3-wire connector. Below is the pin configuration:
| Wire Color | Function | Description |
|---|---|---|
| Red | VCC (Power) | Connect to a 24V DC power supply |
| Black | GND (Ground) | Connect to the ground of the power supply |
| Yellow | Signal (PWM) | Connect to the PWM output of a controller |
Usage Instructions
How to Use the Annimos 24V 160 kg Servo in a Circuit
- Power Supply: Ensure you have a stable 24V DC power source capable of supplying sufficient current (at least 3A recommended).
- Connections:
- Connect the red wire to the positive terminal of the 24V power supply.
- Connect the black wire to the ground terminal of the power supply.
- Connect the yellow wire to the PWM signal pin of your microcontroller or servo controller.
- PWM Signal: Use a PWM signal with a pulse width between 500 µs (0°) and 2500 µs (180°) to control the servo's position.
- Mounting: Securely mount the servo using appropriate brackets or mounts to handle the torque without slipping.
Important Considerations
- Power Requirements: Ensure your power supply can handle the servo's current draw, especially under load.
- Heat Management: Avoid prolonged operation at maximum torque to prevent overheating.
- Signal Stability: Use a microcontroller or servo controller capable of generating precise PWM signals.
- Load Balancing: Avoid exceeding the 160 kg·cm torque limit to prevent damage to the servo.
Example: Using the Servo with an Arduino UNO
Below is an example of how to control the Annimos 24V 160 kg servo using an Arduino UNO:
#include <Servo.h> // Include the Servo library
Servo highTorqueServo; // Create a Servo object
void setup() {
highTorqueServo.attach(9); // Attach the servo to pin 9 on the Arduino
}
void loop() {
highTorqueServo.write(0); // Move the servo to 0 degrees
delay(1000); // Wait for 1 second
highTorqueServo.write(90); // Move the servo to 90 degrees
delay(1000); // Wait for 1 second
highTorqueServo.write(180); // Move the servo to 180 degrees
delay(1000); // Wait for 1 second
}
Note: The Arduino UNO operates at 5V logic, while the servo requires a 24V power supply. Ensure the servo's signal pin is compatible with 5V logic or use a level shifter if necessary.
Troubleshooting and FAQs
Common Issues and Solutions
Servo Not Moving:
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check all connections and ensure the power supply provides 24V and sufficient current.
Erratic Movement:
- Cause: Unstable PWM signal or electrical noise.
- Solution: Use a decoupling capacitor near the servo's power pins and ensure the PWM signal is stable.
Overheating:
- Cause: Prolonged operation at high torque or insufficient ventilation.
- Solution: Reduce the load on the servo and ensure proper ventilation.
No Response to PWM Signal:
- Cause: Signal voltage mismatch or damaged servo.
- Solution: Verify the PWM signal voltage matches the servo's requirements and test with a different servo.
FAQs
Q: Can I power the servo directly from the Arduino?
A: No, the servo requires a 24V power supply, which exceeds the Arduino's voltage capabilities. Use an external power source.
Q: What is the maximum load the servo can handle?
A: The servo can handle up to 160 kg·cm of torque. Exceeding this limit may damage the servo.
Q: Can I use this servo for continuous rotation?
A: No, this servo is designed for positional control within a 0° to 180° range.
Q: How do I prevent jittering in the servo?
A: Ensure a stable PWM signal and use a capacitor to filter out electrical noise in the power supply.
This concludes the documentation for the Annimos 24V 160 kg servo.